
Fターム[5H303LL02]の内容
位置、方向の制御 (6,897) | 制御部、演算部の構成手段 (255) | デジタル回路を含むもの (214)
Fターム[5H303LL02]の下位に属するFターム
計算機を含むもの (91)
Fターム[5H303LL02]に分類される特許
1 - 20 / 123
一つの被駆動体を二つの電動機で駆動させる制御装置
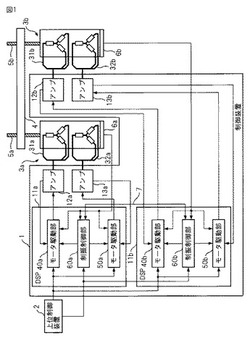
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
位置決め装置

【課題】外部からの入力信号により、モータの回転位置を目標の位置に到達するまで移動して停止するのに好適な位置決め装置を提供する。
【解決手段】従来の位置決め装置にタイマカウンタラッチ処理部31と比率計算部32とを付加し、外部からの入力信号が発せられると、タイマカウンタのカウンタ値をラッチし、新たなサンプル信号が発せられると、このときのタイマカウンタのカウンタ値をラッチするとともに、比率計算部32ではこれらの値と、このときモータ位置演算部13が出力したモータ1の出力軸の回転位置の今回値,前回値と、サンプル信号の周期のカウント値とに基づく比率計算を行い、ラッチタイミングモータ位置とする。この値と移動量設定部14の出力値との加算演算をした値をモータ1の回転軸の位置決め目標値とし、モータ1の回転軸は、前記入力信号が発せられたタイミングの位置を起点として、移動量設定部14の出力値だけ移動して停止する。
(もっと読む)
位置制御装置
【課題】簡素な構成で可動部材の位置を高精度に検出するとともに、高精度に停止位置の制御ができる位置制御装置を提供する。
【解決手段】直流電気モータ39〜42と、電気モータによって可動部材を移動させる移動手段2と、ブラシとコミュテータとの間の断続によって電気モータへの供給電流に発生するリップル成分を抽出してパルス化したリップルパルスを出力するパルス検出部38と、可動部材が移動されるときの現在位置を示す現在位置情報をリップルパルスに基づいて演算し記憶する現在位置情報記憶部44と、電気モータ39〜42に供給される電流が0となる前に可動部材が停止するように電流を低下させる電流制御装置45と、を備える。
(もっと読む)
加工を高精度化するサーボ制御システム
【課題】角度同期方式の長所を生かしつつ、基準角度が与えられない場合でも角度同期方式の学習制御の適用を可能にするサーボ制御システムの提供。
【解決手段】サーボ制御システム10は、各軸を駆動するX軸サーボモータ12、Y軸サーボモータ14及びZ軸サーボモータ16をそれぞれ制御するX軸サーボ制御装置18、Y軸サーボ制御装置20及びZ軸サーボ制御装置22を有する。またX軸サーボ制御装置18及びY軸サーボ制御装置20は、上位制御装置24から送られる各軸指令に基づいて、単調増加又は一方向に変化する基準信号θを作成する基準信号生成部28及び32をそれぞれ有し、学習制御器26及び30は該基準信号に基づいて学習制御を行う。
(もっと読む)
制御システム及びこの制御システムに用いる位置推定方法
【課題】サンプリング周期を細かくすることなく、モータの速度変動等に精度よく対応することが可能な制御システム及びこの制御システムに用いる位置推定方法を提供する。
【解決手段】第2モータ43と、第2モータ43の回転角度に基づくウェハのノッチの位置データを所定の周期で検出する第2エンコーダ44と、第2モータ43をサーボ制御するサーボ制御器32と、サーボ制御器32に対して動作指令を発する位置制御部2と、を有する制御システム1において、位置制御部2は、サーボ制御器32の動作指令を生成するとともに、所定周期で第2エンコーダ44から取得した位置データを取得時刻と共に記憶し、時刻tにおける被制御体の位置f(t)を位置データに基づいてn次の多項式で表し、n次の多項式補間により任意の時刻におけるウェハ(ノッチ)の位置を推定する。
(もっと読む)
モータ駆動装置
【課題】速度制御で動作するモータ駆動装置において、バックラッシュ補正を行う手段を提供することを目的とする。
【解決手段】コントローラ2は、モータ駆動装置1からのモータ位置フィードバックパルス113をパルスカウンタ202で受信し、モータ位置203を得る。モータ位置203を位置指令201と減算器204で比較し、位置偏差205を得る。位置偏差205は位置比例制御器206で位置比例ゲイン倍されて速度指令207となる。これをD/A変換器208でアナログ速度指令209に変換し、モータ駆動装置1に出力する。
(もっと読む)
時間間隔内にパルスを割り当てる回路構成及び方法
位置決め装置及び位置決め方法
【課題】被駆動体の電源遮断後における再起動時に位置の特定を必要とする最終出力端の現在位置を特定可能な位置決め装置及び位置決め方法を提供する。
【解決手段】被駆動体を減速機を介して駆動するモータ10と、減速機の被駆動体側出力軸に取り付けられ出力軸の回転位置を検出するアブソリュート型エンコーダ12と、モータの回転位置をパルスを介して検出するモータ側エンコーダ11と、電源投入によりモータを原点方向に動作させ、モータ側エンコーダの基準エンコーダパルスを出力させるパルス出力手段と、基準エンコーダパルスの位置におけるアブソリュート型エンコーダの現在値を読み取る現在値読み取り手段と、読み取った現在値と予め決められたモータの回転原点位置とからモータ回転数を演算するモータ回転数演算手段と、演算結果に基づき被駆動体の位置を検出する被駆動体位置検出手段とを備えている。
(もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】位置決め過程の位置精度を向上させる位置決め制御ユニット、位置決め制御方法および位置決め制御プログラムを提供する。
【解決手段】位置決め制御ユニット100は、特定の位置決め速度に基づいて1制御周期あたりの操作量を算出する操作量算出部121と、算出された操作量を出力する出力制御部123と、出力された操作量をデジタル信号からアナログ信号へ変換するD/A変換部124と、を備え、アナログ信号により圧電素子を駆動させ、位置検出を伴う閉ループでステージの位置決めを制御する。1制御周期あたりの操作量を制御することで、位置決め動作による振動を抑制することができる。その結果、位置決めの精度を向上させることができる。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
既設輪転印刷機と増設シャフトレス式輪転印刷機の同期運転方法及び同期位置制御システム
【課題】ロータリーエンコーダなどを追加することなく既存ラインシャフト式輪転印刷機に同期させて増設シャフトレス式輪転印刷機の高精度同期位置制御を実現すること。
【解決手段】電動機駆動制御装置8は、ラインシャフト(機械軸)11に設けられたパルスジェネレータ(PG)9が出力する速度位置パルス信号6と速度指令3に基づき電動機13を制御しラインシャフト11の速度が速度指令に一致するよう制御する。速度パルス信号6はコントローラ21で周波数がn(n>1)倍され、折機が一回転する毎に近接スイッチ19から出力される機械位相信号20とともにシャフトレス輪転印刷機の同期位置制御装置23に送られる。各同期位置制御装置23は、コントローラ21の出力及び機械位相信号20とロータリーエンコーダ25の出力の速度位置検出信号26及び近接スイッチ32の出力の機械位相信号33に基づき各電動機24の高精度同期位置制御を行う。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
半導体装置および撮像装置
【課題】低コスト化を図るとともに、駆動電流制御の精度の向上を図ることが可能な半導体装置および撮像装置を提供する。
【解決手段】半導体集積回路101は、駆動電流値を示す複数ビットの駆動データのうち、最上位ビットまたは最上位ビットから連続する複数のビットである上位データに基づいて第1の駆動電流を生成し、負荷に供給する第1の駆動電流生成部21Aと、駆動データのうち、最下位ビットまたは最下位ビットから連続する複数のビットであり、かつ少なくとも駆動データのうちの上位データ以外のすべてのデータを含む下位データに基づいて第2の駆動電流を生成し、負荷に供給する第2の駆動電流生成部21Bとを備える。
(もっと読む)
制御データ発生装置
【課題】自動操作と手動操作が可能な操作子において、自動位置決め完了時の実位置と目標位置との誤差を、その後の手動操作に際して実効的に解消し、違和感のない制御データを発生する。
【解決手段】通常は所定のスケール特性に従う制御データを位置データに応じて発生する。操作子が目標位置Ptに自動位置決めされた直後の手動操作において変更スケール特性を適用する。変更スケール特性においては、位置決め完了時における実位置Prに対応して前記所定のスケール特性上の目標位置Ptに対応する制御データDtが出力されるように起点を設定し、該起点の位置から少なくとも目標位置に達するまでの区間を含む第1の変更区間を設定し、位置検出器12で検出された位置データに対応して発生される制御データが、起点に対応する制御データDtから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで漸次変化するようにする。
(もっと読む)
位置決め装置および制御方法
【課題】静止安定性を有する位置決め装置。
【解決手段】対象物を移動させる駆動力を発生する駆動部と、対象物を目標位置に向かって移動させるべく駆動部をサーボ制御する制御部と、対象物を、駆動力よりも大きな固定力で固定する固定部とを備え、移動した対象物が目標位置に到達した後、少なくとも固定部が対象物を固定するまで、制御部は、対象物が移動していた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続する。上記位置決め装置において、浮上力を発生させて対象物を浮上させる浮上力発生部を更に備え、浮上力発生部が浮上力の発生を停止した後、少なくとも少なくとも固定部が対象物を固定するまで、制御部は、力発生部が対象物を浮上させていた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続してもよい。
(もっと読む)
情報処理装置および方法、プログラム、並びに記録再生装置
【課題】制御対象の角度又は位置を目標値へ向けて動作制御する制御系の制御パラメータの適切な値を、より容易に求めることができるようにする。
【解決手段】制御パラメータ生成部124は、開ループ周波数特性におけるゼロクロス周波数fxから位相進み遅れフィルタの制御パラメータの暫定値を決定し、開ループ周波数特性に基づき、ゼロクロス周波数が目標とするfxに一致するよう制御器ゲインKpを設定し、ユーザに、条件安定のゲイン余裕が12dBとなるように低域ブースタのゲインを決定させ、さらに、位相余裕が32°以上となるよう位相遅れ周波数を変更させて全体の微調整を行わせる。本発明は、例えば、記録再生装置に適用することができる。
(もっと読む)
位置決め制御ユニット、位置決め制御方法および位置決め制御プログラム
【課題】A/D変換の精度をデバイスの分解能以上に高め、位置決めの精度を向上させる。
【解決手段】ステージの位置決め制御をする位置決め制御ユニット120であって、1制御周期あたりの操作量を算出する操作量算出部121と、ステージ140の駆動のために、算出された操作量を出力する出力部126と、センサ150により1制御周期あたり複数回検出されたステージ140の検出位置の、1制御周期にわたる平均値を現在位置として算出する現在位置算出部129と、を備える。これにより、検出の分解能をデバイスの分解能以上に高くして、位置決めの精度を向上させることができる。たとえば、位置換算値1nmの分解能のA/D変換部127を用いて0.1nm単位の位置検出を行うことができる。
(もっと読む)
位置決め制御システム
【課題】従来のビルの清掃作業手法に比べ、清掃用ゴンドラを上下駆動できる装置を簡単に設置することができ、しかも、作業が終了すれば簡単に撤去することができ、さらに、清掃用作業員が効率的に清掃作業を行うことができ、そして、安全で、安価に提供できる位置決め制御システムを提供することを目的としている。
【解決手段】位置決め制御システムは、夫々モータ3で回転駆動される複数のプーリー6と、該各プーリー6に夫々巻回されてなる索体7と、該各プーリー6に巻回されてなる少なくとも2本の索体7を使用して上方向に支持されてなる作業装置12と、前記各モータ3の回転駆動を夫々制御するモータ制御装置2と、前記各モータ制御装置2に前記モータ3の回転駆動量を指令する制御装置1とからなるものとしている。
(もっと読む)
1 - 20 / 123
[ Back to top ]