
Fターム[5H501CC05]の内容
Fターム[5H501CC05]の下位に属するFターム
商用電源を用いるもの (94)
Fターム[5H501CC05]に分類される特許
1 - 20 / 78
モータ駆動装置
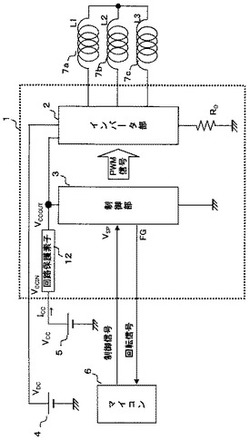
【課題】モータ駆動回路の破壊により、制御電源の出力に接続される負荷が短絡して過大な故障電流が流れることにより、制御電源が破壊に至る場合がある。
【解決手段】制御電源からの電圧が入力されて、主電源からモータの駆動巻線へ電力を供給するインバータ部と、前記制御電源を電力源とし前記インバータ部への通電信号を発生する制御部を備え、前記制御電源の負荷が短絡した時に前記制御電源を保護する回路保護素子を、制御電源電力供給線に設けたものである。
(もっと読む)
モータ駆動装置

【課題】設定内容とともに設定に必要となる関連情報を同時表示する設定表示装置を用いることで簡便かつ迅速な設定を可能とするモータ駆動装置を提供する。
【解決手段】設定表示装置20によりモータ駆動に関する設定が行われるモータ駆動装置1であって、この設定表示装置20は、ある設定項目の設定内容を変更する際に、設定項目の設定内容を表示し、さらに設定項目に関連する少なくとも1以上の関連項目の関連情報を表示するようにした。
(もっと読む)
マイクロ電気機械スイッチ(MEMS)を基にした過電流モータ保護システム
【課題】マイクロ電気機械スイッチ(MEMS)を基にした過電流モータ保護システムを提供する。
【解決手段】過電流保護システム10が、電流の変化率が所定の値を超えていることを示す電気変化率信号を出力するように構成および配置された電流検知部材20と、電流検知部材20に機能的に接続された少なくとも1つのマイクロ電気機械スイッチ(MEMS)装置30と、電流検知部材20と少なくとも1つのMEMS装置30とのそれぞれに電気的に結合されたコントローラ40と、を含んでいる。コントローラ40は、電気変化率信号に応答して少なくとも1つのMEMS装置30を開くように構成および配置されている。
(もっと読む)
電動機器のシステム設計支援装置
【課題】総合的に電動機器全体のシステムの設計を行なうことが難しい。
【解決手段】システム設計支援装置は、解析手段10と、プログラム実行手段20と、記憶手段30と、入力手段40と、動作結果と設計要素を選択的に一覧表示する表示手段50と、システム設計モデルを有機的に結合させるモデル結合手段60と、設計要素を調整または変更する変更手段70と、を備える。解析手段10は、リニアモータ6の変動推力Frを減じた推力Fmを演算する推力演算手段11と、変位δを減じた検出位置Xiと検出速度Viとを演算する移動量演算手段12と、位置と速度の誤差を補正した移動指令に従う制御量Hcを演算する制御量演算手段13と、制御量Hcに対応する電流振動Irを減じた駆動電流Iiを演算する駆動電流演算手段14と、指令位置Pjと指令速度Vjを演算する指令値演算手段15と、を含んでなる。
(もっと読む)
自動機械の制御装置
【課題】稼働率の低下を抑えること。
【解決手段】サーボ制御部17が、サーボモータ21の回転を制御し、異常検出部18が、サーボ制御部17への電源供給遮断状態(すなわち、サーボ制御部17によるサーボモータ21の制御が非制御の状態)において、エンコーダ23によって検出されたサーボモータ21の回転位置(エンコーダ値)を取得するとともに、取得したエンコーダ値に基づいてブレーキ22の異常を検出するように制御装置1を構成する。
(もっと読む)
交流電動機における固定子巻線の短絡故障診断方法
【課題】センサの数を2つにした簡素な環境においても煩雑な計算なしに交流電動機の故障相および故障ターン数を推定することができる短絡故障診断方法を提供する。
【解決手段】本発明に係る短絡故障診断方法は、解析等より正相アドミタンスYpを求めるステップS11と、固定子電流値を一定時間おきに取得するステップS12と、固定子電流値に基づいて電流パークベクトルIを求めるステップS13と、最小自乗法を用いたあてはめにより当該電流パークベクトルIの正相成分Ipおよび逆相成分Inを求めるステップS14、S15と、正相アドミタンスYp、電流パークベクトルIの正相成分Ipおよび逆相成分Inから非対称アドミタンスYa*を求めるステップS16と、非対称アドミタンスYa*に基づいて短絡故障情報を得るステップS17とを含む。
(もっと読む)
モータ駆動装置
【課題】平滑コンデンサを使用することなくモータの絶縁抵抗の劣化を検出する。
【解決手段】インバータ部21内の下アームスイッチング素子SW6と検出スイッチ32を接続することで、低電圧源33を起電部として、アースG、3相交流モータ4、インバータ部21の下アームスイッチング素子SW6、負側の直流バスN、検出抵抗31及びA/D変換器34の閉回路を形成でき、当該閉回路に流れる閉回路電流Icを検出抵抗31及びA/D変換器34で検出することで、3相交流モータ4の絶縁抵抗の劣化を検出できる。
(もっと読む)
交流電源の電源特性に応じてモータの出力を制限するモータ駆動制御装置
【課題】モータに電力を供給する交流電源の電圧低下による悪影響が及ぼされないモータ駆動制御装置を提供する。
【解決手段】制御パラメータ決定部10は、モータ3の駆動中に交流電源2の電圧Vminが目標値Vlowより下であるか否かを、交流電源2の電圧特性に基づいて判断し、交流電源2の電圧Vminが目標値Vlowより下であると判断した場合、交流電源2の電圧Vminが目標値Vlowとなるモータ3の出力の制限値を演算し、モータ3の出力をモータ3の出力の制限値以上に制限する制御パラメータCpを設定し、制御パラメータCpを、駆動制御部7が指令値Iを決定するために駆動制御部7に供給する。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置
【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
電力波形表示システム
【課題】起動直後に過大な軸トルクが作用しても、各電力波形を適切に表示する。
【解決手段】
電力波形表示システム(10)は、電力取得手段(60,61,22〜24,30)と表示手段(53)とを有する。電力取得手段は、モータの起動直後の入力電力を測定可能な第1入力レンジに設定され、モータ動作期間のモータの入力電力を起動電力として取得し、モータ起動後の定常状態の入力電力を測定可能な第2入力レンジに設定され、モータ動作期間のモータの入力電力を定常電力として取得し、起動電力及び定常電力を、負荷時タップ切換装置の正常動作時と比較動作時とで取得する。表示手段は、正常動作時の起動電力に対応する第1起動電力波形と比較動作時の起動電力に対応する第2起動電力波形とを比較可能に表示し、正常動作時の定常電力に対応する第1定常電力波形と比較動作時の定常電力に対応する第2定常電力波形とを比較可能に表示する。
(もっと読む)
モータ駆動システム及びモータシステム
【課題】モータの停止を確認する判断処理や、リレーを遮断するためのいわば割り込み動作などの処理をマイクロコンピュータユニットに担わせることなく、ドライバ内蔵型モータが実質的に回転しないときに、不要な電力をドライバ内蔵型モータに供給しない。
【解決手段】ファンモータユニット9に内蔵されたファンドライバ91には、スイッチK1が設けられた電源線L1を介して給電される。回転速度指令Vsppに応じたアナログ指令値VspがDA変換回路8から出力される。アナログ指令値Vspが所定値Vspb未満のときに、電圧制御回路10はスイッチK1を非導通とする。
(もっと読む)
制御装置
【課題】装置の小型化を図ること。
【解決手段】制御回路100は、CPU10と、CPU10で動作させる第1のプログラムを記憶するフラッシュメモリ22を有するCPU20と、第1のプログラムをCPU10に読み込ませる第2のプログラムを記憶するROM33とを有している。CPU10は、読み出した第2のプログラムを実行することで第1のプログラムの読み込み準備完了をCPU20に通知する。CPU20は、第1のプログラムの読み込み準備完了に基づいて、CPU10への第1のプログラムの転送を開始する。
(もっと読む)
モータ及び揺動コンベヤ
【課題】揺動コンベヤを駆動し、揺動コンベヤのトレーの前進速度、後退速度及び加速度を簡単に変更することができるモータの提供。
【解決手段】所定角度回転する都度パルス信号を出力する手段24を有し、その出力したパルス信号に基づき、回転速度を制御するモータ23。モータ軸又はモータ軸に連動する回転軸に設けられた基準点を検出する基準点検出器43と、基準点検出器43が基準点を検出してから、パルス信号又はパルス信号に基づく信号を計数する計数手段22aと、回転速度を、基準点検出器43が基準点を検出したときにN2とし、計数手段22aの計数値がC1に到達したときに加速してN1(>N2)とし、計数手段22aの計数値がC2(>C1)に到達したときに減速してN2とし、基準点検出器43が基準点を再度検出したときに、計数手段22aをリセットする速度制御手段22とを備えている。
(もっと読む)
誘導電動機の制御装置及び制御方法
【課題】振動の原因となっている推定磁束の直流成分を除去し、モータの振動を低減する制御方式を実現した誘導電動機の制御装置又は制御方法を提供する。
【解決手段】誘導電動機の制御装置10は、誘導電動機106に供給される電流を、静止座標上のα相電流及びβ相電流に変換する3相/2相座標変換器108と、回転座標上のd軸成分の磁束電圧指令及びq軸成分のトルク電圧指令を、静止座標上のα相電圧指令及びβ相電圧指令に変換するdq/2相座標変換器120と、α相電流及びβ相電流と、α相電圧指令及びβ相電圧指令とを入力してα相磁束推定値及びβ相磁束推定値を算出する磁束推定器11と、α相磁束推定値及びβ相磁束推定値からオフセットを取り除くオフセット除去処理部12と、オフセット除去処理部12からのα相磁束推定値及びβ相磁束推定値を入力して誘導電動機106の速度を推定する速度推定器112と、を備える。
(もっと読む)
ブラシレスモータのためのコントローラ
【課題】ブラシレスモータのためのコントローラを提供する。
【解決手段】アナログ信号を受信する入力部と、アナログ信号をサンプリングするアナログ/デジタル変換器(ADC)と、プロセッサとを含むブラシレスモータのためのコントローラ。プロセッサは、モータの第1の電気半サイクル中にADCを起動し、第2の電気半サイクル中にADCを読み取る。更に、コントローラを含むモータシステム。
(もっと読む)
ブラシレスモータのためのコントローラ
【課題】ブラシレスモータのためのコントローラを提供する。
【解決手段】プロセッサと、第1のタイマと、第2のタイマと、比較レジスタと、比較器と、入力部と、1つ又はそれよりも多くの出力部とを含むブラシレスモータのためのコントローラ。プロセッサは、入力部の信号に応答して第1のタイマを開始する。第1のタイマは、次に、第1の期間後に割り込みを生成する。割り込みに応答して、プロセッサは、出力部で第1の制御信号を生成する。プロセッサは、比較レジスタに読み込ませて入力信号及び割り込みの一方に応答して第2のタイマを開始する、比較器は、次に、第2のタイマ及び比較レジスタが対応する時に出力部で第2の制御信号を生成する。更に、コントローラを含むモータシステム。
(もっと読む)
出力制御装置、温度制御装置、定着装置、画像形成装置、電気機器および出力制御プログラム
【課題】簡便な制御でON持続時間やOFF持続時間を短縮化して交流負荷に求められる特性の向上を図りながら、交流負荷への通電制御を適切に行うことができる出力制御装置、温度制御装置、定着装置、画像形成装置、電気機器および出力制御プログラムを提供する。
【解決手段】商用交流電源のゼロクロスポイント間隔以上の連続OFF、または商用交流電源のNゼロクロスポイント期間中で1ゼロクロスポイント期間ONかつ残りのN−1ゼロクロスポイント期間OFF、商用交流電源のNゼロクロスポイント期間中でN−1ゼロクロスポイント期間ONかつ残りの1ゼロクロスポイント期間OFF、または商用交流電源のゼロクロスポイント間隔以上の連続ONのいずれかの制御状態にて交流負荷への通電を制御し、ゼロクロススイッチングによりON/OFFの切り替えを行う。Nは2以上の自然数で制御状態ごとに選択できる任意の数である。
(もっと読む)
整流器ベースのねじれモード減衰システムおよび方法
モータ駆動装置
【課題】インバータ回路からモータを取り外すことなくインバータ回路およびモータの異常を検出すること。
【解決手段】インバータ回路4の上アーム4a、4c、4eおよび下アーム4b、4d、4fまたはそれらの組み合わせが順次オンされた時に電流検出部5a、5bにて検出された電流検出値に基づいて、インバータ回路4またはモータ10の異常を判定する。
(もっと読む)
空気調和機
【課題】電流検出回路での不用な消費電力を低減できる空気調和機を提供する。
【解決手段】室外機制御部4が圧縮機3の回転数を検出し、圧縮機回転数−入力電流値テーブルを参照して圧縮機3の回転数と対応する入力電流値が所定の値以下である場合は検出スイッチ12を閉じるため、圧縮機3の許容範囲の上限に満たない入力電流値である時は、電流検出抵抗11に電流が流れない。また、圧縮機3の回転数と対応する入力電流値が所定の値以上である場合は、検出スイッチ12を開くため、圧縮機3の許容範囲の上限に近い入力電流値である時は、電流検出抵抗11で実際の入力電流を検出して圧縮機3の過電流保護を行なう。このため、電流検出抵抗11での消費電力を必要最小限に抑えつつ、圧縮機3の過電流保護を確実に行うことができる。
(もっと読む)
1 - 20 / 78
[ Back to top ]