
Fターム[5H501LL01]の内容
Fターム[5H501LL01]の下位に属するFターム
アナログ値で検出するもの (71)
デジタル値で検出するもの (383)
センサレスで検出するもの (103)
Fターム[5H501LL01]に分類される特許
201 - 220 / 402
モータ制御装置
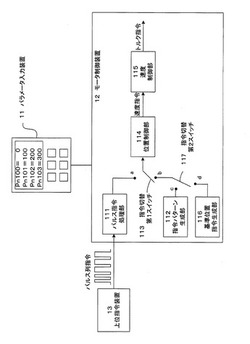
【課題】 上位指令装置を必要とせず、毎回同じ開始位置から所定の運転パターンに従ってモータを駆動制御することを可能としたモータ制御装置を提供する。
【解決手段】 トルク指令を出力することによりモータを駆動制御するモータ制御装置であって、指令パターン生成部112により生成された位置指令によって位置制御を開始するに際して、その開始点となる基準位置を設定し、現在位置から基準位置へ移動するための基準位置指令生成部116を備え、基準位置指令生成部116によって求められた基準位置指令に基づいて、現在位置から基準位置への移動が完了した後に、指令パターン生成部112による位置指令に切り替えて位置制御を開始する。
(もっと読む)
回転角度位置検出装置

【課題】レゾルバの組み込まれた機械と制御装置との互換性を向上するのに好適な回転角度位置検出装置を提供する。
【解決手段】モータ制御システム1を、レゾルバ10とレゾルバ制御装置20とを含んで構成された回転角度位置検出装置100と、モータ200と、回転角度位置検出装置100で検出された回転角度位置の情報に基づきモータ200の動作を制御する制御装置300とを含んだ構成とし、レゾルバ制御装置20を、演算装置20eと、記憶装置20fと、第1I/F回路20gと、第2I/F回路20hとを含んだ構成とし、演算装置20eによって、第1I/F回路20gを介して取得した、レゾルバ10を組み込むモータ200に関連する機械情報を記憶装置20fに記憶保持し、該機械情報を制御装置300からの取得要求に応じて第2I/F回路20hを介して制御装置300に送信するようにした。
(もっと読む)
携帯型電動工具
【課題】モータの回転速度を作動中に自動的に決定して制御するための手段を有する携帯型電動工具を提供することが本発明の目的である。
【解決手段】ドリルの出力部6を駆動するための電動モータ4を収容する本体2を具備するハンマードリルが開示される。振動変換器12がモータ4によって生み出された振動を検知するとともに検知した振動に応じた振動信号を生成する。電子モジュール10が、モータの回転速度を制御するコントローラ10aと、振動変換器12から振動信号を受信して、振動信号に基づいてモータ4の回転速度を決定して、コントローラ10aにモータの回転速度を制御させるために、出力信号をコントローラ10aに供給する信号処理装置10bとを具備する。
(もっと読む)
モータシステムのクリープ制御
機械(10)用の制御システム(23)が開示される。制御システムは、電気モータ(16)と、モータの出力に連結されたトラクション装置(18)とを有し得る。制御システムはまた、減速器(28)と制御装置(24)とをさらに有し得る。制御装置は、モータ及び減速器と通信し得る。制御装置は、クリープトルクを決定し、減速器の作動時であってもトラクション装置にクリープトルクを付加するように構成され得る。  (もっと読む)
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
モータ制御装置およびモータ制御パラメータ設定方法
【課題】制御パラメータの設定において、モータ制御における安定性を維持しつつ、容易な設定操作を可能とする。
【解決手段】制御パラメータ群における各制御パラメータの設定値を記憶するパラメータ記憶部31と、制御パラメータを設定するための設定値が供給され、供給された設定値をパラメータ記憶部31に記憶させるとともに、記憶させた設定値をフィードバックループ20に設定するパラメータ設定部32と、パラメータ記憶部31に記憶された設定値を取り込み、所定の変更規則に基づいて設定値を変換し、変換した設定値をフィードバックループ20に設定するパラメータ変更部33とを備える。
(もっと読む)
モータ駆動装置、駆動方法およびそれを用いた冷却装置
【課題】モータを所望のトルクで駆動する。
【解決手段】第1キャパシタC1は一端の電位が固定される。充放電回路20は、モータの回転数を指示する入力信号S1に応じた電流Ictによって第1キャパシタC1を充放電する。第1コンパレータCMP1は、第1キャパシタC1の電圧Vctを所定のしきい値電圧Vthと比較する。制御信号生成部30は、モータの回転と同期した周期信号FGのエッジと、第1コンパレータCMP1から出力される比較信号S2のエッジのタイミングに応じたレベルを有する制御電圧Vcontを生成する。さらに制御信号生成部30は、充放電回路20の充放電状態を周期信号FGと比較信号S2のエッジにもとづいて切りかえる。モータは、制御電圧Vcontに応じたトルクで駆動される。
(もっと読む)
モータ制御装置、及びモータ制御システム
【課題】同定演算に与える入力信号に対して最適な減衰ゲインを設定する。
【解決手段】周期的にサンプルして保持するゼロ次ホールド要素(26,27)と、ゼロ次ホールド要素の出力信号を1サンプル周期遅延させる遅延要素(28,29)と、遅延要素の出力信号を減衰させる乗算器(30,31)と、乗算器の出力信号を入力として回帰ベクトルを生成する回帰ベクトル生成部(33)と、回帰ベクトルを入力としてパラメータベクトルを離散的に推定する離散系パラメータ推定部(34)と、ゼロ次ホールド要素(26,27)の出力信号を入力信号として、乗算器のゲインの設定値を出力する自動ゲイン制御部(32)とを有する。
(もっと読む)
機械診断方法及びその装置
【課題】信頼性の高い損傷状況の診断を可能とする。
【解決手段】機械診断装置20は、位置指令値から得られるサーボモータ3へのトルク指令値に基づいて駆動対象駆動力を推定する駆動対象駆動力推定部21と、駆動対象駆動力からボールネジ4の弾性変形誤差を推定する弾性変形誤差推定部23と、サーボモータ3の回転位置とテーブル2の位置とから位置偏差を演算する位置偏差演算部22と、弾性変形誤差と位置偏差とを用いて機械損傷係数を演算し、得られた機械損傷係数を予め設定されている閾値と比較して駆動対象の損傷状況を診断する機械損傷診断部24とを備えている。
(もっと読む)
駆動装置、画像形成装置
【課題】低コストで適切に駆動手段のフィードフォワード制御を行うことができる駆動装置、及び、その駆動装置を用いた画像形成装置を提供する。
【解決手段】駆動源と、駆動源により駆動される被駆動部と、被駆動部での非周期的な速度変動を検知する速度変動検知手段と、速度変動検知手段により検知された非周期的な速度変動を低減するように予め設定されたフィードフォワード目標値を用いてフィードフォワード制御を行なう駆動制御部とからなる駆動装置において、上記速度変動検知手段により検知される速度変動は所定時間幅と所定振幅とからなる正弦波であり、上記フィードフォワード目標値は、上記所定時間幅と上記所定振幅とから求められる上記正弦波を矩形近似した矩形波とするものである。
(もっと読む)
フィードフォワード制御装置
【課題】フィードフォワード制御定数を簡単かつ正確に同定する。
【解決手段】電流制御・モータ・機械系150は、フィードバック制御器100によりフィードバック制御されると共に、フィードフォワード制御器200によりフィードフォワード制御される。フィードフォワード制御器200には、Σcisiで定義される微分級数式が設定されている。フィードフォワード定数決定装置300は、時間の経過と共に角速度が変化する同定用位置指令信号r(=Asinωt)及び同定用速度指令信号rv1(=Av1sinωv1t)をフィードバック制御器200に入力し、この時の誤差eをフーリエ演算して位置制御系と速度制御系における誤差eのフーリエ係数を求め、このフーリエ級数から、定数を算出する。
(もっと読む)
モータ制御装置とその制御方法
【課題】特定の期間における特定の時間においてモータ制御装置の制御ゲインを変更することができるモータ制御装置とその制御方法を提供する。
【解決手段】カレンダー機能を有するカレンダー部(120)と、制御ゲインを変更する期間を予め記憶する日付時刻記憶部(121)と、制御ゲインを選択することができるゲイン選択部(110)と、変更される制御ゲインの値を予め記憶するゲイン記憶部(111)を備え、現在の日付および時刻が日付時刻記憶部に設定された範囲内であれば、カレンダー部では、ゲイン選択部に対して制御ゲインの変更を要求し、ゲイン選択部は制御ゲインをゲイン記憶部に設定されている値に所定の時間の間変更する。
(もっと読む)
モータ制御装置およびそのトルク制御方法
【課題】 外部トルク指令の方向を反転した場合でも、反対方向の動作が可能であり、また、位置制御モードや速度制御モードからトルク制御モードへ制御モードを切り換える際において、モータ動作の連続性を保つことができるモータ制御装置およびそのトルク制御方法を提供する。
【解決手段】 速度制御モードからトルク制御モードへの切換時に、外部トルク指令Trfと速度制御部10の積分器103の値Triとに基づいて初期値Tinを算出し、速度制限指令Vlmと速度フィードバックVfbと初期値Tinとに基づいて外部トルク指令Trfを補正するトルク補正値Trcを算出する補正トルク演算部15を備える。
(もっと読む)
位置制御装置
【課題】上位装置からの位置指令値に対してスキュー時間が存在する場合でも、外挿演算結果に制御性悪化の要因となるパルス状の乖離発生を抑制する機能を備える位置制御装置を実現する。
【解決手段】自己のサンプル周期とは異なるサンプル周期を有する上位装置から与えられる位置指令値を、外挿演算手段により自己のサンプル周期の位置指令値に変換して位置制御手段に入力する位置制御装置において、
前記外挿演算手段からの位置指令値を所定サンプル周期遅らせて前記位置制御手段に出力すると共に、現サンプル周期における前記外挿演算手段からの位置指令値の差分値が前記上位装置からの位置指令値の差分値を超える場合には、超過した差分値を所定サンプル周期前の前記外挿演算手段からの位置指令値の差分値に加算する外挿演算補正手段を備える。
(もっと読む)
モータ駆動装置の状態表示装置
【課題】セグメント表示器の個数の増大を抑制しつつ、セグメント表示器に表示されるモータ駆動装置の状態の数を増やすことが可能なモータ駆動装置の状態表示装置を提供する。
【解決手段】異常判定手段8はモータ駆動装置7の異常を判定し、異常パターン出力部9は、モータ駆動装置7の異常の種類に応じた文字や記号を7セグメント表示器11に表示させるとともに、異常レベル出力部10は、モータ駆動装置7の異常の程度に応じて7セグメント表示器11に表示されている文字や記号を点滅させるように指示することで、1個のセグメント表示器11に文字や記号を割り当てた上で点滅パターンも割り当てるようにする。
(もっと読む)
慣性モーメント推定装置
【課題】コギングトルクや偏芯などにより機械系に振動がある場合においても、振動周波数に依存することなく負荷慣性モーメントの推定精度を向上させる。
【解決手段】帰還加速度推定器27は、速度指令値ωrに基づいて電動機1の帰還加速度ameを推定し、推定区間判定器28は、帰還加速度afeが所定のレベル以上の場合は、判定フラグfeを1とし、所定のレベル未満の場合は、判定フラグfeを0として乗算器29に出力し、乗算器29は時定数乗算器26の出力に判定フラグfeを乗算し、加算器30は、遅延器21にて1サンプル期間だけ遅延された負荷慣性モーメントの推定値Jeを乗算器29の出力に加算することで、負荷慣性モーメントの推定値Jeを出力する。
(もっと読む)
電動機の制御装置
【課題】始動直後に歯車のバックラッシに起因する出力軸の回転方向の微小な変動が生じても、運転状態の誤判定を防止することのできる電動機の制御装置を提供する。
【解決手段】回転方向を検出する回転センサ9と、回転トルクの向きを検出するトルク検出手段10と、これらの検出結果に基き、現在の運転状態が力行運転状態と回生運転状態のいずれであるかを判定する運転状態判定手段11と、を設ける。運転状態判定手段11は、運転停止の状態から駆動指令値が入力されたときに、出力軸が微小時間の間に回転方向の変動を繰り返す場合には、回転センサ9で検出された方向に拘わらず力行運転状態と判定する。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
電動機制御装置とその制御方法
【課題】 機械ごとの調整が不要で象限切替え時の象限突起を少なくした電動機制御装置とその制御方法を提供する。
【解決手段】 位置制御部(1)と、速度制御部(2)と、電動機駆動部(3)と、電動機速度生成部(4)と、を備えた電動機制御装置において、トルク指令と電動機速度より推定トルクを生成するトルクオブザーバ(5)と、推定トルクとトルク指令を加算して新たなトルク指令を生成する加算部(6)と、を備え、速度制御部は、速度偏差に速度制御比例ゲインを乗じて第1トルク指令を生成する速度制御比例制御部(21)と、速度指令を遅延させ遅延速度指令を生成する速度指令遅延部(22)と、遅延速度指令と電動機速度の遅延速度偏差を積分して第2トルク指令を生成する速度制御積分制御部(23)と、第1トルク指令と第2トルク指令を加算してトルク指令を生成する加算部(24)と、を備えた。
(もっと読む)
エレベータの制御装置
【課題】 エレベータのかごの一回の走行によりモデル演算部にイナーシャ同定が簡易にできること。
【解決手段】 制御対象に対して想定されるモデル速度指令値及びモデルトルク指令値を、モデル速度指令値が速度指令値に追従するように演算して求めるモデル演算部30と、モータ7の回転速度である速度検出値を検出するエンコーダ8と、モデル速度指令値と速度検出値との差に基づいてトルク指令値を算出するトルク指令算出部40と、モータ7の発生トルクがトルク指令値に一致するように制御してモータ7を駆動させるトルク制御器5と、トルク指令値の直流分を遮断した加速トルク指令値を出力するフィルター部62と、加速トルク指令値及び速度検出値に基づいてエレベータの第1イナーシャ値を算出するイナーシャ算出器60とを備え、第1イナーシャ値を用いてモデル演算部30が演算に用いるパラメータを修正して演算をするものである。
(もっと読む)
201 - 220 / 402
[ Back to top ]