
Fターム[5H505GG02]の内容
交流電動機の制御一般 (51,584) | 制御系 (3,480) | 速度フィードバックするもの (760)
Fターム[5H505GG02]の下位に属するFターム
負荷速度をフィードバックするもの (6)
Fターム[5H505GG02]に分類される特許
61 - 80 / 754
インバータ装置
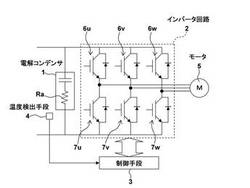
【課題】低温環境下においても電解コンデンサを使用し得るようにする。
【解決手段】整流電圧を直流電圧に平滑する電解コンデンサ1と、前記直流電圧から交流電圧を生成してモータ5を駆動するインバータ回路2と、前記インバータ回路2が有する複数のスイッチング素子6u〜6w,7u〜7wの駆動を制御する制御手段3と、前記電解コンデンサ1の温度を検出して前記制御手段3に出力する温度検出手段4と、を備え、前記制御手段3は、前記温度検出手段4で取得した前記温度が予め定められた目標温度よりも低いとき、前記モータ5の通常運転開始前に、前記直流電圧のリップル電圧が許容値内となるように制限した電流を前記モータ5に通電し、前記電解コンデンサ1の温度を前記目標温度まで昇温させるものである。
(もっと読む)
電力変換装置

【課題】電圧利用率の要求が低い領域を電圧利用率の要求が高い領域にして制御することで、制御性能を損なうことなく低損失化を達成できる電力変換装置を提供する。
【解決手段】電力変換装置において、指令トルクTcmd*(要求トルク)と回転数Nとに基づいて指令電圧振幅Vamp*(電圧振幅)を設定する電圧振幅設定手段52aと、偏差トルクΔTに基づいて指令電圧位相Vp*(電圧位相)を設定する電圧位相設定手段52eと、指令電圧振幅Vamp*と指令電圧位相Vp*とに基づいて正弦波領域であっても過変調領域になるよう昇圧する指令昇圧電圧Vconv*(昇圧指令信号)をコンバータ10に伝達する電圧指令設定手段51aとを有する。この構成によれば、電圧利用率の要求が低い領域を電圧利用率の要求が高い領域にして制御するので、全域で制御性能を損なうことなく低損失化を達成することができる。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
同期モータの磁極位置を検出する検出装置およびこれを備える制御装置
【課題】d相電流指令およびq相電流指令に基づいて回転が制御される磁極位置センサを有しない同期モータに対して、磁極補正値を高精度かつ短時間に検出することができる検出装置およびこれを備える制御装置を実現する。
【解決手段】d相電流指令およびq相電流指令に基づいて制御される同期モータ2の磁極位置を検出する検出装置1は、同期モータ2の電源投入時における磁極初期位置の検出後に、所定のd相電流指令を与えて同期モータ2を正転および逆転させたときにそれぞれ生成される同期モータ2を回転させるための正転時d相電圧指令と逆転時d相電圧指令との差に基づいて磁極補正値を生成する生成手段11と、磁極補正値と同期モータ2のセンサの基準位置であるセンサ基準位置とに基づいて、磁極初期位置を補正する補正手段12と、を備え、制御装置100は、この検出装置1を備え、補正後の磁極初期位置に基づいて同期モータ2の回転を制御する。
(もっと読む)
モータインバータの制御方法、及び制御装置
【課題】スイッチング損失をより抑えられるように2相変調によるモータの駆動を行うための技術を提供する。
【解決手段】電圧基準2相変調部210は、d軸、q軸の各電圧指令値Vd_cmd及びVq_cmdから、3相の電圧指令値を計算し、各相の電圧指令値の位相から固定相の候補相を決定し、各相の電圧指令値を操作する。電流基準2相変調部220は、各相の電流位相を、各相の操作後の電圧指令値としてVu、Vv、Vwをそれぞれ入力し、各相の電圧−電流間の位相差、及び各相の電圧と電流の位相を考慮して固定相を決定し、固定相を変更させる操作を必要に応じて行ってVu’、Vv’、Vw’を生成する。PWM制御部240は、Vu’、Vv’、Vw’を用いて、モータインバータ250の各スイッチング素子251〜256をオン/オフさせるための駆動信号を個別に生成して供給する。
(もっと読む)
電動機の脈動抑制装置および電動機の脈動抑制方法
【課題】システム同定モデル誤差を推定することができる電動機の脈動抑制装置を提供する。
【解決手段】インバータのベクトル制御により駆動される電動機(実プラントPn)の軸トルクTnに、トルクリプル補償電流指令値から軸トルク検出値までの周波数伝達関数の逆関数を乗算して外乱トルクを推定する周期外乱オブザーバPDOと、トルクリプル抑制制御開始直前の初期状態時の軸トルクTnとトルクリプル抑制制御開始後に十分トルクリプルが打ち消された最終状態時に、前記PDOにより推定された外乱推定値dI^nを外乱とみなしシステム同定モデルP^nから推定した軸トルク推定値T^nとを比較してシステム同定モデル誤差ΔPnを求める誤差推定器100と、前記誤差ΔPnを格納するメモリー110とを備え、メモリー110内の誤差ΔPnによってPDOのシステム同定モデルP^nを補正する。
(もっと読む)
モータ駆動システム及びモータ駆動方法
【課題】モータの停止動作における回生容量の大きさを抑制できるモータ駆動システム及びモータ駆動方法を提供する。
【解決手段】モータの回転数の減少率に関して、回生直流電圧から交流電圧への変換に必要な電圧供給装置の回生容量が一定値であるように設定された可変減速レート、及び所定の停止時間でモータが停止するように一定の減少率が設定された一定減速レートを、それぞれ算出する減速レート算出装置と、モータの停止動作の開始時からモータの回転数が可変減速レートと一定減速レートとで一致する時刻まで可変減速レートに従ってモータを減速させた後、一定減速レートに従ってモータを減速させるようにモータ駆動装置を制御する制御装置とを備える。
(もっと読む)
電動車両およびその制御方法
【課題】昇圧コンバータにおける共振の発生を確実に回避可能な電動車両およびその制御方法を提供する。
【解決手段】制御装置40は、電圧センサ52の異常時や所定の省燃費走行条件の成立時等に、昇圧コンバータ10のスイッチング素子Q1を継続的にオン状態とする上アームオン走行を実行する。上アームオン走行時は、昇圧コンバータ10のリアクトルLおよび平滑コンデンサCによりLC回路が形成される。制御装置40は、上アームオン走行の実行条件が成立し、かつ、モータジェネレータM1の回転速度が所定範囲(LC回路の共振発生領域)にあるとき、プリチャージ用のリレーRY3をオン状態にし、かつ、リレーRY2をオフ状態にする。
(もっと読む)
制御装置
【課題】回転電機の応答遅れが伝達トルク振動の周波数に対して無視できない領域においても、十分な制振効果が得られる制御装置が求められる。
【解決手段】伝達トルク振動を打ち消すトルクを回転電機に出力させる制御装置であって、回転速度振動を抽出する回転振動抽出部と、トルク振動周波数を算出する振動周波数算出部と、位相遅れ回転速度振動を算出する位相遅れ回転振動算出部と、回転速度振動及び位相遅れ回転速度振動を固定座標系で表す固定座標系設定部と、回転速度振動及び位相遅れ回転速度振動を回転座標変換する回転座標変換部と、フィードバック値を算出する回転座標系フィードバック制御部と、フィードバック値を固定座標変換する固定座標変換部と、打消トルク振動の指令値を生成する打消トルク制御部と、を備える。
(もっと読む)
交流電動機の制御装置
【課題】変換器のサイリスタが失弧しても、トルク脈動を発生させることなく装置を停止させることが可能な交流電動機の制御装置を提供する。
【解決手段】第1の変換器1と、第2の変換器2と、位置検出手段4と、速度検出手段5と、電流検出手段6と、速度検出手段5の速度帰還が速度指令となるように制御して電流指令を出力する速度制御器72と、電流検出手段6の電流帰還が電流指令となるように第1の変換器1の制御角指令αを出力する電流制御器73と、位置検出手段4の検出位相に応じて第2の変換器2の位相を制御する位相制御器79と、失弧検出手段9とで構成する。失弧検出手段9は、αが第1の所定値以下となり、且つ、電流指令から電流帰還を減算した偏差に第1の定数を乗じて遅延手段によって遅延させた信号から、電流指令に第2の定数を乗じた値を減算した値が第2の所定値以上となったとき、失弧発生とみなす。
(もっと読む)
モータインバータの制御方法、及び制御装置
【課題】モータインバータの電圧飽和を抑えつつ、d軸電流指令値、q軸電流指令値を用いてそのモータインバータを制御するための技術を提供する。
【解決手段】飽和率判定部210は、取得した電圧飽和率が所定値を越えているか否か判定する。電力誤差PI制御部220は、d軸電流指令値、q軸電流指令値を用いて指令電力値を、実際のd軸電流値、q軸電流値を用いて実電力値をそれぞれ計算し、計算した指令電力値及び実電力値を用いて、d軸電流指令値の補正に用いる補正量を計算する。Id補正部230は、計算された補正量を用いて補正d軸電流指令値を計算する。Iq補正部240は、補正d軸電流指令値を用いることにより電流許容量以上の電流が供給される場合に、q軸電流指令値を補正する。そのようにして、モータインバータにおける電圧飽和を抑える。
(もっと読む)
インバータ制御装置
【課題】モータの高速化および多極化に対する厳しい要求に対してもインバータ制御を追従させることのできるインバータ制御装置を提供することを目的とする。
【解決手段】基準キャリア周波数の1周期間隔で第1処理を実行するとともに、基準キャリア周波数をm(mは2以上の整数)倍した高周波キャリア信号の1周期間隔で第2処理を実行することにより、高周波キャリア信号の1周期間隔でPWMデューティを更新する。第1処理においては、モータ電流の計測値に基づいて2相電圧指令値および電気角を算出する。第2処理は、第1処理で算出された電気角に、第1処理からの時間に基づいて求められる角度シフト量を加算することで本処理の電気角を算出し、算出した該電気角を用いて第1処理で求められた2相電圧指令値を2相/3相変換して3相電圧指令値を算出し、PWMパルス信号のデューティを算出する。
(もっと読む)
インバータ制御装置
【課題】電圧指令ベクトルの補正による相電流の歪みを軽減できるインバータ制御装置を提供する。
【解決手段】インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行う。
(もっと読む)
電気自動車
【課題】 モータの永久磁石における減磁等の性能劣化が生じた場合に、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、異常対応モータ駆動制御手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、推定された磁力が設定許容範囲内であるか否かを判定する。異常対応モータ駆動制御手段40は、判定手段39による異常であるとの判定結果に応じて、インバータ装置22によるモータ駆動に制限を与える。
(もっと読む)
洗濯機
【課題】洗濯機において、モータの回転センサ回路の不良が発生した場合に、モータの電気角を正しく算出することができず、インバータ回路が誤った電圧を印可することにより大電流が発生する。これにより、モータ巻き線のレアショート、モータの減磁、インバータ回路のパワースイッチング半導体の故障が生じ、モータが動作しなくなることを防止する洗濯機を提供すること
【解決手段】モータ4の回転センサ回路の不良により、正しく位置検出ができない場合でも、モータ4を停止させ、この不良を報知するともに、大電流を流さないようにすることにより、モータ4やインバータ回路7の故障を未然に防ぐことができる。
(もっと読む)
インバータ制御装置およびインバータ制御方法
【課題】電流検出または電流推定を行わずにデッドタイムによる電圧誤差を無視できるレベルまで低減し、電流センサレスかつデッドタイム補正レスで、高精度の電圧制御が可能なインバータ制御装置およびインバータ制御方法を得る。
【解決手段】3相モータ電気角を検出する角度検出手段(20)と、角度検出手段により検出された電気角に基づいてゲート信号を生成して複数のスイッチング素子をスイッチング動作させる制御部(30、40)とを備え、制御部は、指令電圧の位相に基づいて生成した180度通電制御の矩形波信号を基本波形として、矩形波信号におけるオン状態の期間を3等分した内の中央の期間にPWMパルスを挿入することで前記ゲート信号を生成する。
(もっと読む)
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
インバータ制御装置
【課題】インバータの制御がPWM領域においてはスイッチング周波数に悪影響を及ぼさず、1パルス領域においては運転周波数に関らず電流偏差量の少ない電流応答が得られる制御装置を提供する。
【解決手段】実施形態は、PWM用補正電流基準と電動機電流との比較に基づいて、電動機を駆動するインバータのスイッチング制御信号を直接発生し、制御モードが電動機の中低速域ではPWM制御、高速域では1パルス制御と自動移行する電流追従型PWM制御回路を用いたインバータ制御装置において、電動機の磁束及びトルクを制御すべくベクトル演算して得られた電流基準と、電動機電流との偏差を増幅する定常偏差補正回路と、前記定常偏差補正回路出力信号を前記電流基準に加算してPWM用補正電流基準を演算する加算回路と、電流追従制御型PWM制御回路がPWM制御モードで動作しているとき、前記定常偏差補正回路での制御を積分制御に設定し、1パルスモードで動作しているとき比例積分制御に切換える切換え回路とを具備する。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
電力変換装置
【課題】モータの運転状態に応じて、モータ電圧歪みに起因する電源高調波を低減できるようにする。
【解決手段】スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)を備えて、交流電源(6)から供給された入力交流電力を所定の電圧及び周波数の出力交流電力に電力変換し、接続されたモータ(7)に供給する電力変換装置において、スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のスイッチングを制御する制御部(5)を設ける。スイッチング素子(Su,Sv,Sw,Sx,Sy,Sz)のスイッチングにより生じるリプルを平滑するコンデンサ(3a)を設ける。モータ(7)に流れる電流を制御する電流制御部(53)を設ける。モータ電力歪みに起因する高調波成分を検出し、高調波成分の値に応じて補償値(vd_h,vq_h)を電流制御部(53)の出力に重畳する電圧歪み補正部(54)を設ける。
(もっと読む)
61 - 80 / 754
[ Back to top ]