
Fターム[5H540AA01]の内容
Fターム[5H540AA01]の下位に属するFターム
Fターム[5H540AA01]に分類される特許
1 - 20 / 52
リニア搬送装置
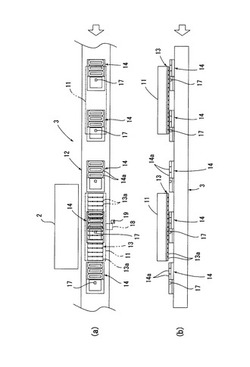
【解決手段】 リニア搬送装置3は、複数の永久磁石13aからなる可動子13と、複数のコイル14aからなる複数の固定子14と、上記可動子13の永久磁石13aの磁界を検出するホール素子17とを備えている。
さらに、上記可動子13における先頭の永久磁石13aよりも搬送方向後方に検出片18を設けるとともに、当該検出片18を検出するセンサ19を上記可動子13の搬送経路上に設ける。
上記ホール素子17が検出した可動子13の先頭の永久磁石13aの磁界から可動子13の位置を認識すると、当該認識した可動子13の位置を仮位置とし、さらに上記センサ19が上記検出片18を検出すると、当該センサ19が検出片18を検出した位置を可動子13の実位置として上記仮位置から置き換え、当該可動子13の実位置を基準に可動子13の位置を認識する。
【効果】 可動子の位置を高精度に認識することができる。
(もっと読む)
位置検出装置

【課題】リニアモータの二次側の界磁を利用して移動体の位置を検出する位置検出装置は、精密機器の移動装置に適用し得る検出精度を有していない。
【解決手段】主位置演算器20は現在位置の上位桁である主位置データを出力し、従位置演算器60は現在位置の下位桁である従位置データを出力する。主位置演算器20は、磁気センサ10の検出信号から2相の矩形波信号を得て計数信号を発生し、計数信号を累積加減算して主演算データを得る。デジタルフィルタ40は、移動平均によって検出信号の振動成分を濾波する。従位置演算器60は、検出信号の逆正接を求めて従位置データを得る。位置演算器70は、主位置データと従位置データを加算して位置データを生成する。ピッチ補正器90は、移動方向に合わせて位置データをピッチ補正値で補正して移動制御装置4に出力する。
(もっと読む)
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
リニアモータの制御判断方法および制御装置
【課題】可動子を曲線状にも移動させるリニアモータにおける、制御可能性を判断する。
【課題手段】可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサの読みを用いて、(1)第1の信号の2乗と第2の信号の2乗との和を算出し、(2)2乗和が所定の値以上にあるとき、リニアモータが制御可能であると判断して、リニアモータの制御を行う。
(もっと読む)
リニアスケール、リニアモータ、及びリニアモータの制御装置
【課題】低廉なコストで基準点からの精緻な距離を求めること。
【解決手段】スケールの磁性体26、27が生成する磁束密度に応じた波形信号を出力するスケール検出手段を設ける。このスケール検出手段は、当該スケールの移動方向Xにおいて、同一位相の正弦波信号A(B)を出力して当該スケールを連続的に検出するように前記スケール長に対応する一定の間隔を隔てて配置された複数のセンサ17a、17b(18a、18b)であり、前記スケールの両端部は、同一極性に設定されているとともに、単独のセンサ17a、17b(18a、18b)で検出された際の出力電圧が、残余の部位が単独のセンサ17a、17b(18a、18b)で検出された際の出力電圧の1/2となるような仕様に決定されている。
(もっと読む)
リニアモータの駆動システム及び制御方法
【課題】固定子が分散配置されたリニアモータにおいて、可動子の不必要な速度変動を防止してスムーズに駆動させながら位置制御を行う。
【解決手段】駆動装置は、制御装置からの位置指令と、対応する固定子の位置センサにより検出された位置と、の偏差を算出し、当該偏差と位置ゲインとに基づいて可動子の速度制御に用いられる速度指令を算出する位置制御を行い、対応する固定子の位置センサにより位置が検出される範囲のうち、磁石部の少なくとも一部の磁石が当該固定子のコイルと対向する制御範囲に可動子が進入してきたときに、可動子の運動速度を速度指令として偏差を逆算し、当該偏差と位置指令から可動子の位置を逆算し、算出された位置を、制御範囲に進入してきたときの可動子の位置として、位置センサにより検出された位置を補正して位置制御を行う。
(もっと読む)
リニアモータ位置検出システム
【課題】測長距離の制限を受けることがないと共にリニアモータの能力を十分に発揮させて制御時間の短縮を図ることができるリニアモータ位置検出システムを提供する。
【解決手段】リニアモータ5により移動されるテーブル4の直線運動をラック12とピニオンギア13により回転運動に変換するようにしたので、直線運動系での検出は有限目盛りであるのに対して回転運動系での検出は無限目盛りとなり、理論的には直線運動系の測長距離が無限であっても、直線運動系の測長距離を回転運動系の測長距離に容易に変換することができ、測長距離の変更に容易に対応することができる。
(もっと読む)
リニアモータおよびリニアモータ駆動システム
【課題】簡易でより精度の高い位置決めが可能なリニアモータおよびリニアモータの駆動システムを提供することを課題とする。
【解決手段】固定子10と可動子20とが互いに相対運動するリニアモータ1であって、可動子に設けられ、相対運動の方向に異なる磁極のマグネット25n、25sが交互に並べられ、可動子の位置を検出するための位置検出用マグネット部25と、相対運動する位置検出用マグネット部のマグネットを検出して位置を検出するための位置検出用センサ16と、相対運動する位置検出用マグネット部のマグネットを検出するゲート用センサ36と、を備え、ゲート用センサが位置検出用マグネット部を検出するとき、位置検出用センサが位置検出用マグネット部に重なる位置に配置される。
(もっと読む)
分散配置リニアモータおよび分散配置リニアモータの制御方法
【課題】固定子の分散配置に適した分散配置リニアモータおよび分散配置リニアモータの制御方法を提供する。
【解決手段】固定子10、10Bと可動子20とが互いに相対運動するリニアモータ1であって、固定子と可動子とは、互いに磁気的に作用をする複数の種類の極(12a、12b、12c)(22a、22b)と、複数の種類の極が種類の順に相対運動の方向に周期的に配列された周期構造とを各々有し、固定子は、相対運動の方向に複数離れて配列され、隣り合う固定子の固定子間距離D1、D2が、可動子の長さLmv以下であり、固定子の極がコイル11により構成され、隣り合う固定子の固定子間距離に基づき、コイルに供給する電流を制御するする電流制御手段と、を備える。
(もっと読む)
リニアモータおよびリニアモータ駆動システム
【課題】簡易でより精度の高い位置決めが可能なリニアモータおよびリニアモータの駆動システムを提供することを課題とする。
【解決手段】固定子10と可動子20とが互いに相対運動するリニアモータ1であって、可動子に設けられ、相対運動の方向に異なる磁極のマグネットが交互に並べられ、可動子の位置を検出するための位置検出用マグネット部25と、相対運動する位置検出用マグネット部のマグネット25n、25sを検出して位置を検出するための位置検出用センサ16と、可動子に設けられ、位置検出用センサの出力を制御するためのゲート用マグネット35と、相対運動するゲート用マグネットを検出するゲート用センサ36と、を備える。
(もっと読む)
モータ駆動装置
【課題】駆動不能や装置ダウンを有効に回避できるモータ駆動装置を安価に提供する。
【解決手段】入力される矩形波のデューティ比に応じてモータ2に電流を供給するモータ駆動回路3と、モータ駆動回路3によりモータに供給される電流を検出して実電流信号として出力する電流検出回路Rs,5,U3と、入力される指令値信号S1と実電流信号S2とに基づき第1偏差信号S3を出力する積分回路U1と、入力される第2偏差信号S4を所定の三角波S5と比較して、その大小関係に対応したデューティ比の矩形波S6を発生し、モータ駆動回路3に対して出力する矩形波発生回路U2と、積分回路U1からの第1偏差信号S3が予め設定された閾値を超えないように制限して、矩形波発生回路U2に対して第2偏差信号S4として出力するリミット回路6とを備える。
(もっと読む)
モータ制御方法およびモータ制御装置
【課題】円滑で正確な位置決めを行うことができるモータ制御方法およびモータ制御装置を提供する。
【解決手段】 誤差補償後位置検出値と前記位置検出値との差分である誤差補償関数として、前記位置指令値を等速変化させる条件下において前記位置指令値と前記誤差補償後位置検出値との差分を最小化するような、前記検出誤差に対応する周期性をもつ関数を求める。また、求められた前記誤差補償関数を適用して、前記誤差補償後位置検出値を前記位置指令値に一致させるように前記モータの位置制御を実行する。
(もっと読む)
モータ駆動装置
【課題】コストの低減を図りつつ、コイル間の特性のバラツキに起因する特性の劣化を抑制する。
【解決手段】入力される駆動指令信号S1及び設定された駆動特性値に基づいて駆動信号を出力するフィルタ11と、フィルタ11からの駆動信号に応じてコイル2に供給する電流を出力するPWM駆動部12と、複数のコイル2の特性毎に予め求められたパラメータが記憶されたメモリ14と、入力される特性選択信号S2に対応するパラメータに基づいて、フィルタ11が用いる駆動特性値を変更して設定する特性設定部13とを備えている。
(もっと読む)
推力リップル解析方法及び補正方法
【課題】モータで生ずる推力リップルの解析及び補正を精確に行うことができる推力リップル解析方法及び補正方法を提供する。
【解決手段】平面モータ1は固定子としての格子プラテン10と可動子としてのスライダ部20とを備えており、モータ制御装置30の制御によってスライダ部20が格子プラテン10上で移動されるとともに位置決めされる。平面モータ1で生ずる推力リップルを解析する場合には、格子プラテン10に対するスライダ部20の位置を変えながらスライダ部20を微小振動させたときの平面モータ1の応答特性を測定し、格子プラテン10に対するスライダ部20の位置に応じた平面モータ1の応答特性の変化から推力リップルを求める。
(もっと読む)
モータ制御方法、および、モータ駆動装置の電源装置
【課題】高速応答性を備えかつ加速性を向上させるモータ制御方法を提供する。
【解決手段】モータを駆動するモータ駆動手段に電力を供給する電源を用意し、モータの加速または減速の開始に基づき、電源からの供給電力の電圧を上げ(S1、S2)、モータの加速または減速の終了に基づき、供給電力の電圧を下げる(S3、S4)。
(もっと読む)
移動装置
【課題】非常時であっても確実に可動部を停止させることができるとともに装置に損傷を与えること防止する移動装置を提供する。
【解決手段】搬送装置10は、可動部としてのリニアステージ12を移動させるリニア搬送部11と、電力の供給を受けてリニア搬送部11を駆動する駆動手段としてのサーボドライバ13と、サーボドライバ13に電力を供給する電力供給手段としての電力装置14と、強制停止指示が入力される強制停止入力部16と、前記強制停止指示の入力に応じてサーボドライバ13の駆動状態を制御し、リニアステージ12を停止させる制御コンピュータ19と、前記強制停止指示の入力に応じて、前記入力から所定時間の経過後に、サーボドライバ13への電力の供給を停止する電力遮断部32とを備えたことを特徴とする。
(もっと読む)
リニアモータのドライブシステム
【課題】 コントローラ及びドライバに特別な機能を付加せずにサーボゲインの切り替えを行うことができるリニアモータのドライブシステムを提供する。
【解決手段】 3相コイルを有する可動子を備えたリニアモータ2に正弦波状の駆動電流を供給する駆動部4とこの駆動部にフィードバック制御系を構成する制御信号を出力する制御部5を含むドライバ3に、位置指令を出力するコントローラ10を接続し、第1サーボゲインで可動子を目標位置に向って移動させ、可動子が目標位置に近づいたときに第2サーボゲイン(<第1サーボゲイン)に切り替えることにより可動子を停止させるリニアモータのドライブシステムにおいて、ドライバ3に内蔵したメモリに可動子が停止する直前に第2サーボゲインに切り替えるプログラムを格納し、可動子の停止直前にこのプログラムを実行することにより、可動子を停止させる。
(もっと読む)
走行制御システム
【課題】例えばリニアモータによって駆動されるビークル等の搬送手段の走行を制御する走行制御システムにおいて、リニアモータの過剰な発熱を防止する。
【解決手段】走行制御システム(100)は、リニアモータによって駆動されると共に被搬送物を搬送可能な搬送手段(3)の走行を制御する。走行制御システムは、搬送手段を加速、減速又は一定速で走行させるべくリニアモータへの通電を切り替え可能な通電手段(4)と、リニアモータに係る所定時間前から現在までの発熱量を特定する発熱量特定手段(5)と、特定された発熱量が所定の発熱量閾値を超えた場合に、加速での走行を抑制する側に通電を切り替えるように通電手段を制御する加速抑制手段(7)とを備える。
(もっと読む)
リニアモータ駆動装置
【課題】ローパスフィルタの周波数帯域を従来よりも広くしかつノーマルモードノイズを低減することができるリニアモータ駆動装置を提供する。
【解決手段】PWMドライバ3は、コントローラ1からの入力信号と負荷コイル2側からの負帰還信号との差を増幅する誤差アンプ31と、誤差アンプ31から出力された信号のパルス幅を補正して出力電圧の位相を進相させる位相補償アンプ32と、この出力電圧をパルス幅変調するPWMアンプ33と、PWMアンプ33と負荷コイル2との間に設けられたインダクタL1とコンデンサC1を含むローパスフィルタ34とを有する。ローパスフィルタ34は、さらにコンデンサC1と直列に接続された抵抗R1を含むとともに、抵抗R1を含む回路定数は、カットオフ周波数近傍における周波数特性が平滑化されるように設定される。
(もっと読む)
リニアモータユニットおよび該リニアモータユニットを備えた電子部品移載装置
【課題】複数のリニアモータを有するリニアモータユニットで隣り合う磁気センサ同士の干渉を回避し、可動子の位置を正確に検出する。
【解決手段】本発明のリニアモータユニット1bは、固定子13と、固定子13に沿って直線的に往復移動する可動子12と、可動子12の位置を検出可能な磁気センサ15とを有するリニアモータA、Bが、複数個設けられるものである。とくに、隣り合う磁気センサ15は、互いに、それぞれの可動子12の移動方向に対して異なる位置になるように設けられる。
(もっと読む)
1 - 20 / 52
[ Back to top ]