
Fターム[5H572AA14]の内容
Fターム[5H572AA14]に分類される特許
1 - 20 / 92
倒立型移動体、その制御方法、及びプログラム
【課題】小型の抵抗に維持しつつ回生電力を効果的に消費すること。
【解決手段】倒立型移動体は、姿勢情報を検出する姿勢検出手段と、車輪を駆動する駆動手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第1制御ゲインを乗算して駆動手段を駆動するための第1制御信号を生成する第1制御手段と、姿勢検出手段により検出された姿勢情報に基づいた値に第2制御ゲインを乗算して駆動手段を駆動するための第2制御信号を生成する第2制御手段と、回生電圧が所定閾値以上であるか否かを判定する判定手段と、を備える。駆動手段は、第1制御手段から出力される第1制御信号と、第2制御手段から出力される第2制御信号と、に基づいて前記車輪を駆動する。第1及び第2制御手段は、判定手段により回生電圧が所定閾値以上であると判定されたとき、第1及び第2制御ゲインのうち一方の符号を反転させて、第1及び第2制御ゲインを変更する。
(もっと読む)
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置

【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
負荷制御システムおよび負荷駆動システム
【課題】負荷駆動のためのアクチュエータ等の負荷駆動要素を複数制御する場合、その制御システム構築が容易となる負荷制御システムを提供する。
【解決手段】負荷駆動のための複数の負荷駆動要素のそれぞれを駆動制御するために、該複数の負荷駆動要素に対応して設けられる複数のドライバを含む負荷制御システムであって、複数のドライバのそれぞれは、自ドライバに直接関連付けられた負荷駆動要素を制御する制御部を有する。そして、複数のドライバのそれぞれは、負荷制御システムにおいて、自ドライバの制御部から該自ドライバを除く他のドライバの全部または一部の対象ドライバの制御部に対して、該対象ドライバに直接関連付けられた負荷駆動要素の駆動制御を行うための指令信号の送信が可能となる相互制御通信状態が形成されるように、互いに電気的に接続される。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
モータ制御装置
【課題】同時に加速または減速する場合が高い頻度で発生する複数のモータを、共通電源の電源容量を増加させずに、サイクルタイムを減少させるような適切な加減速条件で動作させることができるモータ制御装置を得ること。
【解決手段】加減速パラメータ設定部3aは、電源供給部2から全モータに供給できる電力である供給可能電力の制限値または電源供給部2が全モータからの回生電力を処理できる電力である回生可能電力の制限値の範囲内で、動作指令8に含まれる指令移動量及び指令速度に基づき、2以上のモータのそれぞれに対する加減速パラメータ9を算出し、加減速処理部4aに設定する。
(もっと読む)
直流変換部の最大出力計算部を備えたモータ駆動装置
【課題】交流を直流に変換する単一の直流変換部と、直流変換部から出力された直流を、各モータ部の駆動電力としてそれぞれ供給される交流に変換する複数の交流変換部と、を有するモータ駆動装置において、低コストで占有スペースの小さい直流変換部が選定され易いようにしたモータ制御装置を実現する。
【解決手段】モータ制御装置1は、入力された交流を直流に変換する単一の直流変換部11と、直流変換部11から出力された直流をモータ部2−1、2−2および2−3の駆動電力としてそれぞれ供給される交流に変換する複数の交流変換部12−1、12−2および12−3と、直流変換部11への入力電圧および入力電流から直流変換部消費電力を所定の時間ごとに計算する直流変換部消費電力計算部21と、所定の時間ごとに計算された直流変換部消費電力の中から最大値を抽出しこれを直流変換部最大出力として出力する直流変換部最大出力計算部22と、を備える。
(もっと読む)
直流交流変換装置を接続可能なモータ駆動制御装置
【課題】DC/AC変換装置を接続可能なモータ駆動制御装置において、モータ駆動制御装置に接続したDC/AC変換装置に接続されたモータの出力が大きい場合でも、AC/DC変換回路が過負荷状態になる事態を回避することができるモータ駆動制御装置を提供する。
【解決手段】接続部11にDC/AC変換回路20を接続したときのモータ4,5,6,19の出力の合計がAC/DC変換回路12によって供給可能な電力を超えると予測される場合、制御装置16は、モータ4,5,6,19の出力の合計をAC/DC変換回路12によって供給可能な電力以下に維持しながらAC/DC変換回路12からDC/AC変換回路13,14,15,20への直流電圧又は直流電流の供給又は供給停止を制御する。
(もっと読む)
モータ制御装置
【課題】交流を直流に変換したのちさらに交流に変換してこれを駆動電力とするモータを、容易に制御できるモータ制御装置を実現する。
【解決手段】モータ51−1および51−2の駆動に関する指令をする数値制御部11と、交流を直流に変換する順変換部12と、数値制御部11による指令に基づき、順変換部12から出力された直流をモータ51−1および51−2の駆動のための交流に変換する逆変換部13−1および13−2と、を備えるモータ制御装置1において、逆変換部13−1および13−2は、数値制御部11および順変換部12と通信する第1の通信手段21を有し、順変換部12は、逆変換部13−1および13−2と通信する第2の通信手段22と、第1の通信手段21および第2の通信手段22を介して数値制御部11から転送された情報に基づいた順変換部12の動作設定に、順変換部12の動作を制御する順変換制御部23と、を有する。
(もっと読む)
数値制御装置
【課題】軸ごとの電力を正確に算出する数値制御装置を提供する。
【解決手段】コンバータ部110の出力電力を取得するコンバータ電力取得手段300と、モータ13−1〜13−Nの出力を軸ごとに算出するモータ出力算出手段310と、コンバータ出力電力とモータ出力の全軸に関する総和との差を全損失として算出する全損失算出手段340と、モータの損失を軸ごとに算出するモータ損失算出手段320と、アンプの損失を軸ごとに算出するアンプ損失算出手段330と、モータ損失とアンプ損失との和を軸損失として軸ごとに算出する軸損失算出手段350と、軸損失の全軸に関する総和に対する、軸毎の軸損失の比率に基づいて、全損失を軸毎に分配した損失を軸ごとに求める損失分配手段360と、モータ出力と分配軸損失との和を軸電力として軸ごとに求める軸電力算出手段370とを備える。
(もっと読む)
モータ制御装置
【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
延伸装置の制御方法
【課題】延伸装置において、手動介入後の自動運転復帰で、各セクションの速度到達時刻がバラツキ、製品の延伸率にバラツキがでるため、製品むらが大きくなっていた。
【解決手段】延伸装置において、複数の延伸ロールは各々が増減速機を介して電動機によって駆動され、前記各電動機は駆動電流を検出する電流検出器と回転速度を検出する回転速度検出器を備え、前記電流検出器および前記回転速度検出器の検出信号はそれぞれ前記各電動機の駆動制御を行う駆動制御器に入力され、前記駆動制御器には延伸制御器から各延伸ロールの回転速度制御信号が入力されており、前記駆動制御器は前記回転速度制御信号に基づいて電動機の回転制御を行い、手動介入後の自動運転復帰時には、各延伸ロールの回転速度および加減速度は再計算され、設定速度到達時間の最も遅いものの設定速度到達時刻に、各延伸ロールが同時に設定速度に達するように設定されていることを特徴とする。
(もっと読む)
回転電機、回転電機駆動システム及び制御方法
【課題】
本発明は、大トルクであるとともに、高加速度を実現するためにモータ自体の回転子イナーシャが小さいことが求められる大容量サーボモータにおいて、決められた回転子イナーシャを実現するための固定子形状が定まった制約のもとでも、最もトルク応答の時定数が小さくなる回転電機の駆動制御を実現することを目的とする。
【解決手段】
複数巻線形の回転電機において、各巻線を電気時定数が小さいクラスの巻線群と、電気時定数が大きいクラスの巻線群とにより構成し、トルク指令値、またはトルク指令値の変化信号を、電気時定数が小さいクラスの巻線群に優先的に分配して、各駆動制御回路に与える指令波形が異なる状態で運転することを特徴とする。
(もっと読む)
射出成形機
【課題】求められる制御精度がそれぞれ異なる複数のサーボモータをより効率的に集中制御する多軸サーボドライバを搭載する射出成形機を提供すること。
【解決手段】四つのサーボモータM1〜M4を集中制御する多軸サーボドライバEQを搭載する射出成形機において、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4のそれぞれに関する演算のために用いられる一のCPU資源を備える。また、その多軸サーボドライバEQは、それら四つのサーボモータM1〜M4の制御周期を個別に設定する制御周期設定部C13を備え、成形サイクル中にそれら四つのサーボモータM1〜M4のうちの少なくとも一つの制御周期が変化するように、それら四つのサーボモータのそれぞれの制御周期を設定することができる。
(もっと読む)
モータ制御システム
【課題】1つの外部位置検出器からの位置情報により、複数のモータ動作を制御可能とするモータ制御システムを提供する。
【解決手段】モータ駆動装置A12aは、外部位置検出器19aから位置情報を取り込む外部位置検出器接続手段16aと、取り込んだ位置情報を他のモータ駆動装置12に送信し、位置指令を前期上位制御装置11から受信するシリアル通信手段13aと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18aを備え、モータ駆動装置B12bは、前記モータ駆動装置A12aから送信された位置情報を受信し、さらに位置指令を前期上位制御装置11から受信するシリアル通信手段13bと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18bを備え、1つの外部位置検出器からの位置情報により、複数のモータ動作を制御する。
(もっと読む)
モータ制御装置および産業用ロボット
【課題】複数のモータの動作を制御するモータ制御装置において、複数のモータ各々に対して各々PWM制御を行う複数のインバータ部に供給する三角波キャリアの位相が同一であると、各インバータ部のスイッチング素子の動作が同期して大きなリプル電流が直流電源部を構成するコンデンサに流れ、コンデンサに悪影響を及ぼす。
【解決手段】複数のモータの動作を制御するモータ制御装置において、複数のモータ各々に対して各々PWM制御を行う複数のインバータ部と、前記複数のインバータ部に供給する動力を平滑する容量性素子を備え、各インバータ部はPWM制御の基本波形となる各三角波に基づいてPWM制御を行い、各インバータ部の各三角波の位相を全て異なるようにする。
(もっと読む)
部品実装機
【課題】装備されているモータが減速停止するときに生じる回生電力を有効利用して従来よりも消費電力を削減した部品実装機を提供する。
【解決手段】部品採取部材と基台との間に移動可能に介在されそれぞれモータ4X、4Zによって駆動される複数の移動部材2X、2Zを備え、部品採取部材が部品を採取および実装する部品実装機1において、各モータ3X、3Zが減速するときに運動エネルギを回生して生じた回生電力PR1〜PR3を制御する回生電力制御部6と、回生電力制御部6と電力をやりとりする各モータの電源部5X、5Zと、2つの移動部材2X、2Zが移動する場合に、一方の移動部材の減速停止の開始タイミングまたは減速停止中の所定タイミングに同期して他方の移動部材の始動加速を開始させ、一方のモータから得られる回生電力PR2を他方のモータの起動に利用する(駆動電力PZ)ように回生電力制御部6を制御する制御部7と、を備える。
(もっと読む)
制御装置
【課題】モータの動作に精度が要求されるときに、インバータのPWM方式の切り替えに伴い発生するモータのトルク変動の影響を回避でき、モータの動作に精度が要求されないときに、PWM方式の切り替えによる効果を得ることができる制御装置を得ること。
【解決手段】制御装置は、複数のPWM方式のうちインバータのPWM動作に用いるためのPWM方式の切り替えを行う切り替え部と、動作指令信号により第1の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを不許可とし、前記動作指令信号により第2の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを許可する指令判断部とを備え、前記切り替え部は、前記指令判断部により切り替えが不許可とされた場合、PWM方式の切り替えを行わず、前記指令判断部により切り替えが許可された場合、PWM方式の切り替えを行う。
(もっと読む)
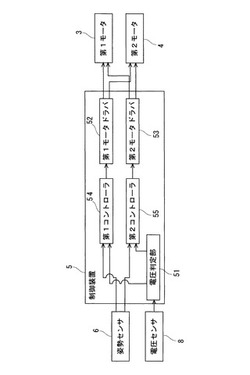
位置決め制御装置および工作機械
【課題】位置決め制御装置においてスループットを低下させずにモータの発熱を抑える。
【解決手段】位置決め制御装置は、第1の被駆動部材を移動させる第1のモータ54と、第2の被駆動部材を移動させる第2のモータ64と、第1および第2のモータのそれぞれに対して2自由度制御を行い、第1の被駆動部材を第1の目標位置に移動させ、第2の被駆動部材を第2の目標位置に移動させる制御手段51,53,61,63とを有する。制御手段は、第1の被駆動部材を第1の目標位置に移動させるために第1のモータの動作に必要な第1の時間Txと、第2の被駆動部材を第2の目標位置に移動させるために第2のモータの動作に必要な第2の時間Tyとを求め、第1および第2の被駆動部材をそれぞれ第1および第2の目標位置に移動させる際に、第1および第2のモータを、第1および第2の時間のうち長い方の時間で同時に動作させる。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
ロボット関節のための統合高速トルク制御システム
【課題】ロボットの関節の制御システムであって、高速トルクを達成し、かつノイズに強い制御システムを提供する。
【解決手段】並置関節プロセッサ及び高速通信バスを有する印刷回路基板アセンブリ(PCBA)30を含んでいる。PCBAは、また、パワーインバータモジュール(PIM)34と、1つ以上のモータ位置センサからのセンサデータを処理するためのセンサ調整電子素子(SCE)36とを含んでいる。関節のモータのトルク制御は、高速トルクループとしてPCBAにより提供される。各関節プロセッサは、制御されるべきロボット関節内に組み込まれるか、又はそれに並置されている。関節プロセッサ、PIM、及び高速バスの並置により、制御システムの雑音イミュニティが増し、関節モータ40からのセンサデータの関節レベルの局所的処理により、各制御ノードに対する往復のバスケーブルを最短にすることができる。
(もっと読む)
1 - 20 / 92
[ Back to top ]