
Fターム[5H572EE03]の内容
Fターム[5H572EE03]に分類される特許
201 - 219 / 219
駆動方法、駆動機構及び撮像装置
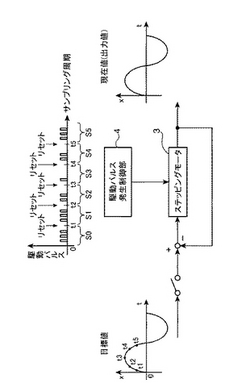
【課題】 撮像装置の手振れ補正機構に好適な、ステッピングモータを駆動源としたサーボ制御方式の駆動機構を提供すること。
【解決手段】 駆動機構は、所定の駆動パルスにより駆動されるステッピングモータ3と、前記駆動パルスの発生条件を制御する駆動パルス発生制御部4とを備える。前記駆動パルス発生制御部4には、所定のサンプリング周期S0〜S5が設定されている。この駆動パルス発生制御部4は、前記サンプリング周期S0〜S5毎に、それまでの駆動パルスの発生条件をリセットすると共に、次のサンプリング周期までのサンプリング間隔内における駆動パルス発生条件を定める演算を行う。
(もっと読む)
モータ制御装置

【課題】 小負荷領域に限らず広範囲でモータの運転効率を向上することができるモータ制御装置を提供するものである。
【解決手段】三相電機子巻線5U,5V,5W、三相電機子巻線5R,5S,5Tを備えたモータMを第一インバータ3、第二インバータ4により駆動するモータ制御装置であって、要求運転状態に応じて第一インバータ3、第二インバータ4を切り替えることを特徴とする。
(もっと読む)
駆動装置およびこれを搭載する車両並びに駆動装置の制御方法
【課題】 車両に要求される要求トルクを出力すると共にインバータ24,25の温度上昇を抑制する。
【解決手段】 インバータ24の温度がインバータ24を正常に機能させることができる温度としての閾値を超えたときには、モータM1から出力されるトルクを徐々に小さくすることによりモータM1からの出力を制限すると共に要求トルクが出力されるようモータM2からトルクを出力する。インバータ25の温度が閾値を超えたときにも同様の処理を行なう。この結果、インバータ24,25の温度のうちいずれかが閾値を超えたときでも要求トルクを出力することができ、運転者への違和感を抑制することができる。しかも、インバータ24,25の温度上昇を抑制することができる。
(もっと読む)
リニアアクチュエータ
【課題】 一対のリニアモータのスライダ間をアーム部材で結合するリニアモータで発生する各モータ間の位置誤差を補正して高精度の位置決め制御を可能とするリニアアクチュエータを実現する。
【解決手段】 位置検出手段を備えた一対のリニアモータのステータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき前記スライダ間の位置誤差信号を算出する位置誤差検出手段と、
前記中点位置信号と目標位置信号との偏差に基づく推力指令によりドライバを介して前記リニアモータのスライダを駆動する中点位置制御手段と、
前記位置誤差信号を演算した補正信号を前記推力指令に差動的に重畳させる姿勢制御手段と、
を備える。
(もっと読む)
インバータ駆動ブロワ制御装置
【課題】 PMSMをインバータで駆動するブロワ装置で、電源供給が停止した状況でも、保護に至らずブロワ装置を運転継続させ、復電した時点で迅速かつ確実に定常運転へと移行できるようにする。
【解決手段】 停電状態では、フィルタコンデンサ2の電圧Vdcを電圧検出器11により検出し、直流電圧制御部13へ入力し、直流電圧指令と検出値が一致するようにQ軸電流指令を算出する。D軸電流指令は所定の値とする。座標変換器21では、3相電流値を磨耗変換しDQ軸の電流値へする。D軸電流指令とD軸電流と、Q軸電流指令とQ軸電流指令とが電流制御器15へと入力されDQ軸出力電圧指令が演算される。軸ずれ補正部22ではD軸電圧指令を入力とし、それが0になるようにインバータ出力周波数への補正量を出力する。
(もっと読む)
カッティングプロッタとそれを用いた被カットメディアのカット方法
【課題】ヘッドに把持されたカッタにより被カットメディアを所望形状に正確にカットできるカッティングプロッタを提供する。
【解決手段】ヘッド30を被カットメディア20上方をX―Y方向に相対的に移動させる第1駆動モータ50又は/及び第2駆動モータ60からヘッド30に把持されたカッタ32によりカットされる被カットメディア20のカット速度変更箇所までの距離Tが遠くなるのに従い、そのカット速度変更箇所におけるヘッド30の被カットメディア20に対してのX―Y方向の相対的な移動加速度の絶対値を、加速度調整手段70を用いて、漸次小さく調整する。そして、カッタ32を、プラテン10上に搭載された被カットメディア20上方を、記憶手段40に記憶されたカットデータに従い、第1駆動モータ50及び第2駆動モータ60の回転角度に倣って、X―Y方向に相対的に正確に追従移動させる。
(もっと読む)
サーボモータ駆動装置及びサーボモータの駆動方法
【課題】 サーボモータの回生エネルギーの再利用効率を向上しつつ、コンバータ回路部を小型化することが可能な、複数のサーボモータを駆動するサーボモータ駆動装置及びサーボモータの駆動方法を提供する。
【解決手段】 複数のサーボモータ5、5’、…、5”の各々に、それぞれ交流電力を供給する複数のインバータ回路4、4’、…、4”と、これらに共通して電源を供給するコンバータ回路3と、いずれかのサーボモータに対して加速指令を与えるときは、同時に他のいずれかのサーボモータに対して減速指令を与えるインバータ制御部6と、を備えてサーボモータ駆動装置を構成する。
(もっと読む)
画像形成装置
【課題】 モータ起動後の位相調整処理を早期に実施し、ファーストプリントタイムを短縮させることを課題とする。
【解決手段】 像担持用の複数の回転体と、これら回転体を駆動する複数のモータを備え、回転体に設けられた基準位置検出部材を検出する手段と、モータの回転量を検出する手段と、モータに対して速度制御および位置制御を行うモータ制御手段と、各回転体に設けられた被検出部材の検出結果及び速度検出手段の結果から各回転体の位相差を検出する手段を備え、回転体の位相差を調整する制御手段を備えた多色画像形成装置において、モータの回転量の検出手段に、FGパルスとホール素子の二種を備えた構成をとる。
(もっと読む)
サーボモータの制御方法
【課題】 模型用ロボットなどの移動体の動作に不具合が発生することを防止できるサーボモータの制御方法を提供する。
【解決手段】 本発明に係るサーボモータの制御方法は、模型用移動体を動かすために、制御部からサーボモータにPWM信号を送り、送られたPWM信号でサーボモータの出力軸を所望の位置まで回転させて模型用ロボットの動作を制御する。さらに、サーボモータに制御部からPWM信号を送った際に、サーボモータの出力軸が回転を開始するとともに、サーボモータから、サーボモータの出力軸の位置情報をPWM信号に変換して制御部に返送する。
(もっと読む)
車両用電動機制御装置
【課題】 インバータの平滑コンデンサの電荷を放電させるとき、車両に騒音や振動を発生させない車両用電動機制御装置を提供すること。
【解決手段】
ハイブリッド車において、車両の駆動軸に複数の電動機MG1、MG2が接続される。この複数の電動機MG1、MG2は、複数のインバータ回路INV1、INV2により制御される。イグニッションオフのとき、バッテリ5との直流回路を遮断し、インバータ6内部の平滑コンデンサ32の電荷を電動機MG1、MG2の巻線で放電させる。このとき、電動機MG1、MG2で発生するトルクが、車両駆動軸3上で相殺するようにインバータ回路INV1、INV2を制御する。
(もっと読む)
駆動制御装置、及び該駆動制御装置を有する画像形成装置
【課題】 回転体駆動系、又は回転体を介して駆動されるベルト駆動系の駆動制御装置、及び該駆動制御装置を有する画像形成装置を提供する。
【解決手段】 回転体駆動系もしくは回転体を介して駆動されるベルト駆動系に2つの電動機を付加し、負荷トルクや外乱による駆動系の速度変動や位置変動を補正する。また、2つの電動機の動作を制御することにより、各電動機から発生するトルク同士の干渉を低減し、かつ2つの電動機の間に、適度な負荷トルクもしくは張力が働き、駆動系のバックラッシやベルトのシワを抑制する。さらに、2つの電動機によって装置を動作させることで、一方の電動機が故障した場合であっても、駆動制御装置が不動となることを防止する。
(もっと読む)
リニアアクチュエータ
【課題】 一対のリニアモータのスライダ間を結合するアーム部材の中点位置の制御性を向上すると共に、ドライバの構成を簡素化できるリニアアクチュエータを実現する。
【解決手段】 位置検出手段を備えた一対のリニアモータを有し、このリニアモータのステータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力に基づき前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記中点位置信号と目標位置信号との偏差に基づき前記スライダを共通のドライバにより駆動する位置制御手段と、
を備える。
(もっと読む)
サーボ制御システムおよびサーボ制御方法
【課題】 サーボモータの2つを連動して機械の1つの軸を駆動する場合、2軸間の干渉を防ぎ、2軸間のデータに遅れがあっても位置偏差の少ないサーボ制御システムおよびサーボ制御方法を提供する。
【解決手段】 2つのサーボ制御装置それぞれに、別の軸のデータを受取る位置・速度・トルクデータ受信手段16、26と、2軸間の位置フィードバックの差分に位置補正係数をかけた値を自分の位置指令に加算し、2軸間の速度フィードバックの差分に速度補正係数をかけた値を自分の速度指令に加算し、2軸間のトルク指令の差分にトルク補正係数をかけた値を自分のトルク指令に加算し、2軸間の干渉の度合いや剛性に応じてそれぞれの補正係数を調整する位置・速度・トルク補正手段17、27とを備える。
(もっと読む)
モータシステム
【課題】モータによる回転駆動力の大小の切り替えを、低損失・低コストで実現する。
【解決手段】同一軸46を駆動するように設置された第1モータ42と第2モータ44は、二つのスイッチ48,50を切り替えることにより、直流電源30に対して並列または直列に接続される。第1モータと第2モータは、その端子電圧に応じた駆動出力を有するため、同一軸は並列接続時には高出力で駆動され、直列接続時には低出力で駆動される。二つのモータ及びスイッチを備えるこの構成は、低損失性及び低コスト性を備えている点で、レジスタやPWMコントローラを用いる従来技術に比べ優れている。
(もっと読む)
画像形成装置
【課題】 電源装置の低コスト化、小型化を図りつつ、複数のモータを適切に駆動し得るモータ駆動装置を提供する。
【解決手段】 プリンタ1は、ポリゴンミラーへ回転駆動力を供給するスキャナモータ25と、ポリゴンミラー以外の被駆動体への駆動力を供給するメインモータ118とを備えている。スキャナモータ25の駆動に使用する第1最大電流値をA1とメインモータ118の駆動に使用する第2最大電流値をB1とを加算した値Cよりも電源手段の最大供給電流値Dのほうが小さくなるように構成されている。そして、スキャナモータ25とメインモータ118を駆動する際には、電流制御部232による制御により、スキャナモータ25に供給される電流値A2とメインモータ118に供給される電流値B2とを加算した加算電流値Eが、最大供給電流値Dよりも小さくなるように、少なくともメインモータ118に供給される電流値B2を第2最大電流値B1よりも小さく抑えるようにする。
(もっと読む)
モータ駆動装置及び画像形成装置
【課題】 ブラシレスDCモータを駆動するモータ駆動装置において、相切替を安定して行うことができ、かつ、装置の小型化、コスト低減を効果的に図りうる構成を提供する。
【解決手段】 モータ駆動装置は、デジタル処理を行うASIC200と、ASIC200からのデジタル信号出力に基づいて、スキャナモータ25の駆動を行うモータドライバ250aとを備えて構成されている。ASIC200には、ホール素子信号が入力可能に構成されており、このホール素子信号に基づいて、スキャナモータ25の相切換タイミングを決定する相切換部234が設けられている。そして、相切換部234で決定した相切換タイミングに基づくデジタル信号(相切換信号)をモータドライバ250aに出力するように構成されている。
(もっと読む)
駆動制御装置と制御方法及び画像形成装置
【課題】 回転体駆動もしくは回転体を介して駆動されるベルト駆動系に付加し、駆動系の負荷トルクや張力を制御するための駆動制御装置を提供する。
【解決手段】 回転機構8もしくはこの回転機構を介して駆動されるベルト機構1と、前記回転機構8もしくはベルト機構1を駆動する第1の電動機5と、所定の目標速度もしくは目標位置に応じて前記第1の電動機5を制御する第1の制御部13とこの第1の制御部13からの出力に応じて第1の電動機5を駆動する第1のモータドライバ14から構成される駆動制御装置において、前記回転機構8もしくはベルト機構1に前記第1の電動機5とは異なる駆動力を伝達する第2の電動機6を備えるようにした。
(もっと読む)
複数圧縮機冷却システムの容量制御用システムおよび方法
排出液の温度設定値が得られるように動作状態にある圧縮機302、303の速度および数が制御される、複数圧縮機液体冷却システム300を対象とする容量制御アルゴリズムが、提供される。このアルゴリズムは、冷却システム300の負荷が増加したことに応答して、圧縮機302、303が始動されるべきか否かを決定し、別の圧縮機302、303が始動される場合は、動作中の全ての圧縮機302、303の動作速度を調整する。このアルゴリズムは、複数の圧縮機302、303が動作している状態で、冷却システム300の負荷が減少したことに応答して、圧縮機302、303が消勢されるべきか否かを決定し、圧縮機302、303が消勢される場合は、動作中の残りの全ての圧縮機302、303の動作速度を調整する。  (もっと読む)
(もっと読む)
複数の負荷用の変速駆動装置
交流電圧を直流電圧に変換するための変換器(202)と、変換器(202)からのエネルギーにフィルタにかけ、それを蓄積するための直流リンク(204)と、複数のインバータ(206)とを有する変速駆動装置(104)が提供される。各インバータ(206)は、直流電圧を交流電圧に変換して、このインバータ(206)に接続されている対応する負荷に電力を供給するように構成されている。変換器(202)は交流電源と電気的に接続されており、直流リンク(204)は変換器(202)と電気的に接続されており、複数のインバータ(206)は電気的に並列に直流リンク(204)と接続されている。複数のインバータ(206)の各インバータ(206)は、複数のインバータ(206)の他のインバータ(206)とは実質的に独立に動作するように構成されている。  (もっと読む)
(もっと読む)
201 - 219 / 219
[ Back to top ]