
Fターム[5H572EE03]の内容
Fターム[5H572EE03]に分類される特許
101 - 120 / 219
電動機制御方法及び電動機制御装置

【課題】空転滑走発生時のトルクのアンバランスを抑制するための新たな技術を提案すること。
【解決手段】主電動機信号切替部220は、現在の走行状態が力行であれば、進行方向最後方軸である第2軸を基準軸として、第2軸の電動機電流及び回転子角周波数をもとに磁束成分電流フィードバック値Id*と、トルク成分電流フィードバック値Iq*と、電動機の回転子角周波数ωr*とを算出する。現在の走行状態が制動であれば、主電動機信号切替部200は、進行方向最前方軸である第1軸を基準軸として、第1軸の電動機電流及び回転子角周波数をもとに磁束成分電流フィードバック値Id*と、トルク成分電流フィードバック値Iq*と、電動機の回転子角周波数ωr*とを算出する。
(もっと読む)
電動機制御方法及び電動機制御装置

【課題】空転滑走時の連れ回りに対する全く新しい制御方式による解決手法を提案すること。
【解決手段】 力行時には、制御対象2軸のうち、進行方向最後方の第2軸の電動機IM_2のトルク成分電流から、進行方向最前方の第1軸の電動機IM_1のトルク成分電流を減算した電流差ΔIq_rを用いた制御を行う。具体的には、空転滑走の発生を検知した場合に、その検知時の電流差ΔIq_rを保持し、これに所定の係数K1を乗じた値を連れ回り防止引き下げ指令Iq_Rとして、トルク成分電流指令値Iq*からの引き下げ指令とする。
(もっと読む)
駆動力制御装置
【課題】小型の電気自動車に適した走行安定性の向上を図る。
【解決手段】操舵角センサ18から操舵角θを検出し(S1)、旋回方向を判別する(S2)。左旋回の場合(S3)、車速Vを演算した後(S4)、操舵角θから求められた旋回半径や車速Vから操舵時に旋回中心51へ向けて車両に働く横加速度Gを演算して予測する(S5)。横加速度Gが所定値71未満の場合、外輪側である右ホイールインモータ22への通電電流の目標値を定める供給電流目標値を低下して右ホイールインモータ22の駆動力を低下する(S7)。これにより、左ホイールインモータ21で駆動される左フロントタイヤ14と右ホイールインモータ22で駆動される右フロントタイヤ15とにおいて左右駆動力差ΔFが発生し(S8)、この左右駆動力差ΔFにより電気自動車2に旋回復元モーメントMを発生させる(S9)。
(もっと読む)
モータ装置
【課題】バックラッシュによる位置精度の低下を抑えることが可能なモータ装置を提供する。
【解決手段】第1ギアが設けられた出力軸と、前記第1ギアと噛み合う第2ギアを駆動するための第1モータと、前記第1ギアと噛み合う第3ギアを駆動するための第2モータと、前記第2ギアの歯面及び前記第3ギアの歯面が、前記第1ギアの回転方向において当該第1ギアの互いに異なる側の歯面と接触しつつ前記出力軸を回転させるべく前記第1モータと前記第2モータとを制御するためのコントローラと、を有する。
(もっと読む)
モータ制御装置及びモータの絶縁劣化検出方法
【課題】 漏れ電流の影響を受けることがなく、モータが地絡していても、インバータ回路中の半導体スイッチの破損がなく、しかも精度のよい絶縁劣化検出装置を備えたモータ制御装置を提供する。
【解決手段】 電圧分割回路7が、負極直流出力部4Bの一方とグランドとの間にリレー接点からなる常開スイッチ回路SWを介して配置されている。検出動作制御部8は、遮断器2が開状態になっているときに、常開スイッチ回路SWを閉状態にし且つ3つのアーム回路51〜53中のトランジスタTR1〜TR6のうち、正極直流出力部4Aに電気的に接続されたトランジスタTR1〜TR3の少なくとも一つのトランジスタを導通状態にする。第1の抵抗器R1の両端電圧が分圧電圧として、電圧比較部9内の電圧比較器OPに入力される。電圧比較部9は、電圧分圧回路7から出力された分圧電圧Vと基準電圧Vrefとを電圧比較器OPで比較し、分圧電圧Vが基準電圧Vrefを超えるとアラーム信号を出力する。
(もっと読む)
インホイールモータ
【課題】より高いエネルギー効率を実現することができるインホイールモータを提供すること。
【解決手段】本発明によるインホイールモータ1は、車輪の内周側に配置された車輪毎の回転電機2と、回転電機2を駆動する駆動回路C1と、駆動回路C1に電力を供給する電源Eと、電源Eの充電率Rを検出する充電率検出手段44aと、慣性回転体42と、慣性回転体42を回転させる付加回転電機31と、電源Eの供給する電力により付加回転電機31を駆動する付加駆動回路C2と、充電率Rが所定値α以上である場合に付加駆動回路C2により付加回転電機31を駆動させる制御手段44cを備えることを特徴とする。
(もっと読む)
電動機制御装置及び電動機駆動方法
【課題】 ガントリー機構などを持つ複数の電動機を駆動する機械であっても、上位指令装置を必要とすることなく試運転が可能な電動機制御装置及び電動機駆動方法を提供する。
【解決手段】 位置制御部141〜143と、速度制御部151〜153と、電動機駆動回路161〜163を複数備えると共に、連続運転パターンを設定するためのパラメータを駆動する複数の電動機4〜6毎にメモリに格納し、指令パターン生成部12で位置指令を生成する際にはメモリ18から読み出す、パラメータ変更・読み出し部17を備え、指令パターン生成部12が、メモリ18に格納された各電動機毎のパラメータをパラメータ変更・読み出し部17により読出し、各電動機4〜6毎の連続運転パターンを設定する。
(もっと読む)
多軸モータ駆動装置
【課題】余剰電力を蓄電池等に蓄えることで省エネルギー化を実現できるとともに、蓄電池等を小型化・低コスト化でき、高効率で蓄電池等を運用でき、且つ短時間の回生電力であっても蓄電池等に蓄電できる多軸モータ駆動装置を提供する。
【解決手段】多軸モータ駆動装置1は、直流電源ライン10と、直流電源ライン10からの直流電源電圧VDCを交流電源電圧に変換して交流モータ60へ供給するためのインバータ回路21を有する複数のインバータモジュール20とを備え、複数のインバータモジュール20のうち一部のインバータモジュール20の駆動電力出力端23に、交流モータ60に代えてコイルユニット40及び蓄電池50が接続される。
(もっと読む)
電動機駆動システム
【課題】機械的に接続された2台以上の電動機を可変速駆動する際、速度センサを用いずに、2台以上の電動機にかかる負荷に応じて、それぞれの回転速度変動分を簡単に一定に保つ制御を可能とする電動機駆動システムを提供する。
【解決手段】電動機駆動システムにおいて、電流検出部4a、4bの検出電流とそれに相当する電動機の電流指令値に応じて、電動機2a、2bのそれぞれの速度変動推定値を演算する速度変動分演算部A16a、速度変動分演算部B16bと、速度変動分演算部A16a、速度変動分演算部B16bで演算された、それぞれの速度変動推定値が互いに同じ所定値になるように、電動機2a、2bへの印加電圧の大きさを補正する値を出力する速度均一化電圧補正演算部17とを備えた。
(もっと読む)
船舶用インバータシステム
【課題】複数のインバータで駆動する多巻誘導電動機において、インバータの数を減らして駆動する場合の電動機速度制御の応答速度を改善する船舶用インバータシステムを提供する。
【解決手段】船舶の主推進用誘導電動機へ1次電流を供給する複数のインバータと、前記各インバータに駆動される非推進装置用誘導電動機と、主推進用誘導電動機の速度検出器および電流検出器と、トルク電流成分指令信号を出力する速度制御器と、主推進用誘導電動機と導通しているインバータの台数信号に基づいて磁束指令信号に乗ずるゲイン信号を出力する磁束指令補正器と、からなる船舶用インバータシステムであって、インバータは速度検出信号と電流検出信号とトルク電流成分指令信号と磁束指令信号と磁束指令信号に乗ずるゲイン信号に基づいたベクトル制御演算により操作されるので、インバータの台数が減少しても、主推進用誘導電動機の速度制御の応答速度の低下を抑制できる。
(もっと読む)
電動機駆動装置、電動車両および電動機駆動装置の制御方法
【課題】並列接続された複数のコンバータを備える電動機駆動装置において、システムを緊急停止する際の過電圧の発生を防止可能な電動機駆動装置を提供する。
【解決手段】第1コンバータ10−1,第2コンバータ10−2は、互いに並列してコンデンサCに接続される。各コンバータは、直流チョッパ回路から成る。システムの緊急停止が要求されると、第1インバータ20−1、第2インバータ20−2および第2コンバータ10−2は直ちに停止され、第1コンバータ10−1は規定時間だけ動作を継続する。これにより、システム停止に伴ないモータコイルやコンバータのリアクトルからコンデンサCに流れ込む電力を蓄電装置B1で吸収できる。
(もっと読む)
学習制御機能を備えた電動機の制御装置
【課題】所定の周期で繰り返される指令に基づいて電動機を制御する場合に、複数の電動機を使用して1つの被駆動体を高精度に駆動させることができる制御装置を提供する。
【解決手段】制御装置2は、第1電動機10の位置偏差が最小となるように位置偏差補正量を計算する第1学習制御器4と、第2電動機12の位置偏差が最小となるように位置偏差補正量を計算する第2学習制御器6とを有する。第1学習制御器4と第2学習制御器6とは互いに独立であり、それぞれの電動機の位置偏差を最小にすべく作用するが、学習制御の応答性を定めるパラメータは同じものが設定される。
(もっと読む)
重機の制御
本発明は、例えばタービンまたはプロペラなどの回転作業機械(P)の回転速度を制御するためのシステムであって、前記回転作業機械(P)は、少なくとも1台のモーター(M1)に連結され、前記モーター(M1)によって提供される所定の回転速度により回転されるように構成され、前記モーター(M1)は、制御システム(C)に接続され、前記モーター(M1)の前記回転速度は、前記制御システム(C)によって制御されるように構成されている。前記回転作業機械(P)は、調整可能に構成された負荷制御(PC)を有し、前記制御システム(C)は、前記回転作業機械(P)に接続されている。本発明により、選択可能な複数の回転速度の間でソフトに遷移を行うことができ、所要エネルギーの変更に合わせて前記モーター(M1)の前記サイズおよび回転速度をステップバイステップで調整してエネルギー消費を削減する。
【代表図】図1 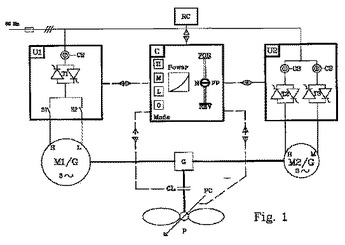 (もっと読む)
(もっと読む)
多軸モータ制御装置とその制御方法
【課題】軸の追加や削除に対応でき、CPUの機能を最大限に発揮できる多軸モータ制御装置とその制御方法を提供する。
【解決手段】位置・速度制御処理をするCPU6と制御軸数を格納する制御軸数格納部12と制御周期を格納する制御周期格納部14とトルク指令をモータ制御部へ送信する第1通信部11とを備える多軸制御部2と、トルク指令を受信する第2通信部20とトルク指令とモータ電流から電圧指令を生成する電流制御部16と電圧指令を電力増幅しモータを駆動するモータ駆動部17とを備える多軸モータ制御装置において、多軸制御部は、制御軸数に応じた制御周期を格納した制御周期テーブル格納部15を、モータ制御部は、ID格納部18を備え、定常運転前に全てのIDを読み出して、制御軸数格納部に格納、制御周期テーブル格納部から対応した制御周期を読み出して制御周期格納部に格納するようにした。
(もっと読む)
電動車両の駆動システムの制御装置および制御方法
【課題】複数の駆動輪とモータユニットを備え、1つのモータユニットで異常が生じても、複数の駆動輪の各々の動作状態を一致させて電動車両の挙動を安定化させる。
【解決手段】電動車両の駆動システムの制御装置は、複数の駆動モータ31の各目標トルク指令値を運転者操作と車両挙動に応じて演算する目標トルク演算手段32、目標トルク演算手段から出力された各指令値に基づいて複数の駆動モータの各々を制御するモータ制御手段33、複数の駆動モータあるいは複数の駆動モータの駆動経路のうち少なくともいずれか1つに異常が発生したときに異常を検知する異常検知手段34、検知された駆動モータあるいは駆動モータの駆動経路に対応する駆動モータの動作状態を判別する動作状態判別手段35、動作状態判別手段により判別された駆動モータの動作状態に合わせて他の駆動モータの動作状態を制御する同期制御手段36とを備える。
(もっと読む)
XY位置決め装置の駆動制御装置
【課題】複数のモータ軸を用いて1つの負荷を駆動する際に、モータ軸同士の干渉を抑えながら、最適な位置決め制御を可能とする。
【解決手段】複数のモータ軸を用いて1つの負荷Lを駆動するXY位置決め装置において、各モータ軸の制御系内に設けられた外乱オブザーバ68L、68Rと、該外乱オブザーバの出力部分に設けられた、位置偏差を監視し、位置偏差の量に応じて外乱オブザーバの出力を制限するオブザーバ出力調整部70L、70R、70と、を備え、位置偏差の量が多い場合には外乱オブザーバの出力を多く戻して積極的に補償を行ない、位置偏差の量が少ない場合には外乱オブザーバの出力を制限する。
(もっと読む)
グラビア印刷機およびその制御方法
【課題】各印刷ユニットによる印刷の見当ずれを早期に定常状態に収束させることができるグラビア印刷機およびその制御方法を提供する。
【解決手段】グラビア印刷機は、最初にウェブWに印刷を施す前段印刷ユニット10aと、前段印刷ユニット10aの下流側に設けられた後段印刷ユニット10b、10c、10dとを備えている。各後段印刷ユニット10b、10c、10dは、ウェブW上の見当マークを検出する見当マーク検出センサ15b、15c、15dと、印刷ユニット間の張力を検出する張力検出器18b、18c、18dとを各々有している。また、グラビア印刷機は制御装置30を有している。制御装置30は、見当ずれの大きさならびにウェブWの張力の所定時刻間の偏差に基づいて、モータ13b、13c、13dの制御量修正値を経時的に算出するようになっている。
(もっと読む)
電気車制御装置
【課題】電動機の指令トルクは本来、車両を所定の加速度で運転するために設定されたものであるが、空転検知で指令トルクを引き下げるという粘着制御アルゴリズムによって、空転時には自ずと所定の加速度が得られない状態になる。
【解決手段】車輪とレールのすべり速度に相当する車両速度と電動機回転速度の差速度を検知し、この値が所定値以下の間は通常のトルク制御を行い、所定のトルク指令値のままでは差速度の拡大が止まらない状態で、差速度の制限目標値との偏差に応じたトルク低減特性を付加した粘着制御アルゴリズムを適用する。空転状態にあっても所定の車両加速度を得ることを可能にする電気車制御装置を提供するものである。従来の粘着制御は図5の左側の接線力ピークを想定して、すべり速度を極力小さくするように制御していた。本発明は図5右寄りの接線力を利用可能にしたことで車両の加速度が確保でき、定時運行が可能になる。
(もっと読む)
モータ制御装置と制御定数調整方法
【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
駆動力制御装置
【課題】車輪の目標車輪速度を決定できない場合における、各車輪の駆動力の制御をおこなうことの可能な駆動制御装置を提供する。
【解決手段】複数の駆動輪に伝達する動力を個別に制御する駆動装置と、操舵輪の操舵角を制御して、車両の旋回半径を制御する操舵装置とを備えた駆動力制御装置において、車両の要求加速度を求める要求加速度算出手段(S1)と、車両の旋回半径を操舵角および推定車速から求める第1の旋回半径算出手段(S2)と、車両の旋回半径を操舵角および実際の車速から求める第2の旋回半径算出手段(S2)と、第1の旋回半径算出手段または第2の旋回半径算出手段のいずれかで求めた旋回半径および要求加速度に基づいて、複数の駆動輪の目標回転速度を別個に求める目標回転速度算出手段と(S3)、各目標回転速度に基づいて、複数の駆動輪の目標駆動力を別個に求める目標駆動力算出手段(S4)とを備えている。
(もっと読む)
101 - 120 / 219
[ Back to top ]