
Fターム[5H572EE09]の内容
Fターム[5H572EE09]に分類される特許
1 - 20 / 30
電動車両の制御装置
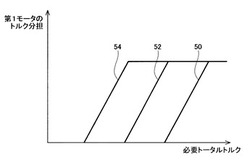
【課題】複数のモータが同一の駆動軸にトルクを付加する電動車両において、必要なトータルトルクに対して、それぞれのモータのトルク分担を少ない計算負荷で適切に決定することが可能な技術を提供する。
【解決手段】本明細書は、同一の駆動軸にトルクを付加する2以上のモータを備える電動車両の制御装置を開示する。それぞれのモータは、制御方式が切替え可能である。その制御装置は、必要なトータルトルクから、それぞれのモータのトルク分担を計算する際に、それぞれのモータの制御方式の組み合わせに応じて、トルク分担の計算に用いるトルクマップを選択し、必要なトータルトルクと、選択されたトルクマップを用いて、それぞれのモータのトルク分担を計算する。
(もっと読む)
モータ制御装置

【課題】幅広い電源状態や負荷状態に対応して装置を駆動できるようにするモータ制御装置を提供する。
【解決手段】少なくとも二つ以上のモータを並列に駆動するモータ制御装置において、駆動電流の合計値の上限が所定の値を超えない一定値となるように、少なくとも一つ以上のモータについて時間とともにデューティ比を変更するデューティ制御を行うことを特徴とする。
(もっと読む)
モータ制御装置
【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
車両制御装置
【課題】ゴムタイヤ等の低剛性体からなる車輪を駆動する誘導電動機が複数個接続された車両制御装置において、並列に複数個接続された各誘導電動機に流れる電流アンバランスによる特定電動機の過電流状態を抑制する。
【解決手段】各誘導電動機に流れる電流を用いて、電流アンバランスよる特定電動機の過電流を抑制する如くトルク制御の補正を行う。車輪を駆動する誘導電動機が複数個接続された車両制御装置において、複数個接続された各誘導電動機に流れる電流を検出する検出装置を備え、制御回路に接続し、検出した電流に応じてトルク指令を補正し、特定の誘導電動機の過電流を防ぐことを特徴とする。
(もっと読む)
遠心分離装置及びその運転方法
【課題】遠心分離装置において通常運転時に停電が発生することに起因して生じる課題を解決する
【解決手段】遠心力の作用により被処理液を固形物と分離液とに分離する回転ボウルと、回転ボウル内に配置され、回転ボウルと相対的な差速をもって回転されるコンベアと、回転ボウルに連結された主駆動モータと、コンベアに連結されたバック駆動モータと、電源と主駆動モータとの間に電気的に接続される主駆動側インバータ装置と、電源とバック駆動モータとの間に電気的に接続されるバック駆動側インバータ装置と、を備えた遠心分離装置の運転方法であって、停電が発生すると、慣性力で回転する回転ボウル及びコンベアによって主駆動モータ及びバック駆動モータで生成される回生電力を、バック駆動側及び/又は主駆動側インバータ装置の制御電源及び動力電源に給電して回転ボウルとコンベアとが相対的な差速をもって回転する状態を維持しながら減速させるようにする。
(もっと読む)
駆動制御装置及びこれを搭載した電動車両
【課題】走行中にモータに供給する電力に制限を要する状態までバッテリの充電状態が低下しても、車両の挙動を好適に維持して安定した走行が可能な駆動制御装置を提供する。
【解決手段】電動車両1の駆動制御装置10は、複数のモータ5各々に対応して設けられ、モータ5各々の駆動を制御するための複数のモータ制御モジュール12と、モータ制御モジュール12を制御するための車両制御モジュール11と、モータ5に電力を供給するバッテリ13と、を備え、車両制御モジュール11またはモータ制御モジュール12が、少なくとも一の前記モータ5に供給する電力に対して制限を要する状態までバッテリ13の充電状態が低下したことを条件としてその制限を反映させた制御指令を複数のモータ5すべてに対して同じタイミングで送信する。
(もっと読む)
電動動作装置及びそれを用いた作業機械
【課題】シンプルで部品点数も少ない構成で自動的にバランスを修正できる信頼性の高い電動動作装置及びそれを用いた作業機械を提供することにある。
【解決手段】第一の電動アクチュエータ1は、ロータ位置センサSを有する電気モータM1を備え、第二の電動アクチュエータ2は、ロータ位置センサを有さない電気モータM2を備える。第一の電動アクチュエータ1と第二の電動アクチュエータ2の出力は、不等長リンク3により合成される。電気モータM1は、その運転条件で最大のトルクを発生するロータと磁界の位置関係にあり、電気モータM2は、その運転条件で最大のトルクを発生するロータと磁界の位置関係から外れて最大のトルクから減少したトルクを発生するような運転状態となる。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】過電流を流すことなく、故障を検出できる電動機駆動装置およびこれを用いた電動パワーステアリング装置を提供する。
【解決手段】電動機駆動装置1の制御部50は、通常のPWM制御を開始する前に、端子電圧とPIG1電圧に基づいて、MOS21〜26自体のショート故障を検出する。MOS21〜26自体のショート故障が検出されなかった場合、MOS21〜26の少なくとも1つをオン制御した後、全てのMOS21〜26をオフ制御したときの端子電圧とPIG1電圧とに基づいて、MOS21〜26を非導通状態にできないプリドライバ52のショート故障を検出する。これにより、上MOS21〜23から対をなす下MOS24〜26に向かって電流が流れる経路が形成されないため、過電流を流すことなくプリドライバ52のショート故障を検出することができ、インバータの焼損を防止することができる。
(もっと読む)
協調制御装置
【課題】高度な協調制御が可能な協調制御装置を提供する。
【解決手段】複数の制御対象を協調制御する協調制御装置は、一対の出力制御系と、一対の交差回路と、伝達関数部とを具備する。一対の出力制御系は、それぞれ制御回路部を有する一対の制御対象に対して設けられる。一対の交差回路は、出力制御系の制御回路部の一方の入力側から他方の出力側へ、及び他方の入力側から一方の出力側へ設けられる。伝達関数部は、一対の交差回路にそれぞれ設けられる。
(もっと読む)
プレス設備の電力供給装置及び方法
【課題】サーボプレスと機械プレスが混在するプレス設備全体の受電容量を小さくすることができる電力供給装置及び方法を提供する。
【解決手段】外部から電力を受電する受電装置81と、電力をサーボモータ21に適した直流又は交流に変換して供給するサーボプレス電力変換装置31と、電力を機械プレス40,60の駆動モータ41,61に適した直流又は交流に変換して供給する回生可能な機械プレス電力変換装置51,71と、受電装置81から電力変換装置31,51,71に電力を供給する交流リンク82と、機械プレス40,60及び機械プレス電力変換装置51,71を制御する電力制御装置100とを備える。電力制御装置100により、サーボプレス20が大電力を必要とするときに、機械プレス40,60のフライホィール42,62を減速させて電力を回生させ、回生された電力を交流リンク82を経由してサーボプレス20に供給する。
(もっと読む)
モータ駆動装置
【課題】クラッチや複合遊星歯車を使用せずに、2つのモータのロータ間の位相を変えることのできるモータ駆動装置を提供する。
【解決手段】2つのモータMa,Mbと、この各モータMa,Mbのモータ軸11a,11bの出力が伝達される出力軸20とを備え、一方のモータMaのティースに巻回された巻線と他方のモータMbのティースに巻回された巻線とが接続されたモータ駆動装置であって、一方のモータMaのロータRaと、他方のモータMbのロータRbとの間の位相を可変するロータ位相可変機構を設け、このロータ位相可変機構は、モータMaのモータ軸11aの出力を出力軸20に伝達するとともにロータRaの軸方向に移動可能な伝達部材30a,30bを有し、この伝達部材30a,30bは、軸方向の移動量に応じた量だけロータRa,Rbを回動させる。
(もっと読む)
バックラッシュを抑制するサーボ制御装置
【課題】ポジションタンデム制御のモータ制御装置においてプリロードを付加することで、ショックを抑えることができるサーボ制御装置を提供する。
【解決手段】1つの被駆動体を駆動する2台のモータ15,25と、位置偏差値を演算処理して速度指令値を出力する位置制御部11,21と、速度指令値と速度検出器17,27から帰還される速度フィードバック値とに基づいて積分要素と比例要素で処理してトルク指令値を出力する速度制御部12,22と、トルク指令値に基づきモータの駆動電流を制御する電流制御部13,23と、速度制御部12,22の一方の積分要素の出力を他方の積分要素にコピーする速度積分器共通化手段5と、2台のモータ間のバックラッシュを抑制するために、各々のトルク指令値にそれぞれプリロードトルク値を付加する補正部6を備え、補正部は時定数回路を有し、プリロードトルク値を所定時定数に基づき徐々に付加する。
(もっと読む)
鉄道車両用モータ駆動制御装置
【課題】PWMコンバータで変換された直流電力を、交流に変換して永久磁石同期モータを駆動する2つのモータ駆動用インバータにおいて、直流側電圧のアンバランスを抑制する制御の応答速度を向上することで制御の安定化を可能とする。
【解決手段】第一のインバータ制御装置51において、出力電力演算部107は、第一のモータ出力電力Power1を演算する。第二のインバータ制御装置52においても同様に、第二のモータ出力電力Power2が演算される。電力バランス制御部53は、第一及び第二のモータ出力電力演算値の偏差がゼロとなるように、インバータ21、22のトルク指令値を補正する。
(もっと読む)
インバータ制御駆動装置およびそれを用いた掘削機
【課題】複数の汎用モータの各インバータの出力周波数を同じにしてもモータのすべりや駆動装置(ギア)のバックラッシュにより、汎用モータのモータ巻線に逆起電力が発生する。
【解決手段】2個の汎用モータ5a、5bを制御するインバータ8a、8bを、コンバータ部14a、14bと、該コンバータ部14a、14bからの出力電圧を平滑するコンデンサ部15a、15bと、該コンデンサ部15a、15bにより平滑された直流電圧を三相交流に変換する出力ブリッジ部16a、16bと、コンバータ部14a、14bとコンデンサ部15a、15bの間に直列接続された突入電流抑制抵抗部18a、18bと、該突入電流抑制抵抗部18a、18bに並列接続された第一スイッチ19a、19bと、を有し、第一スイッチ19a、19bは、コンデンサ部15a、15bのコンデンサ電圧が第一規定電圧に達すればONに切り替わる。
(もっと読む)
電気掃除機
【課題】各電動送風機の累積動作時間を均一化して、使用寿命をより向上できる電気掃除機を提供する。
【解決手段】電動送風機15A,15Bを収容した掃除機本体11を備える。電動送風機15A,15Bの駆動を独立して制御可能な制御手段16を備える。制御手段16が、電動送風機15の少なくともいずれかを除く残りの他の電動送風機15を動作させる中モードおよび弱モードと、全ての電動送風機15を動作させる強モードとを有し、強モードから中モード(弱モード)に切り換えるときに、少なくとも前回中モード(弱モード)で動作させなかった電動送風機15を動作させる。各電動送風機15の累積動作時間を均一化し、使用寿命をより向上できる。
(もっと読む)
クレーンシステム
【課題】複数のクレーンを効率的に運転するクレーンシステムを提供する。
【解決手段】システムコントローラ5は、受電部4と複数のクレーンの電力を受信する送受信部と、受電部電力が最大電力を超えないように荷役コマンドに対応したクレーン最大電力を生成するクレーン最大電力生成部を備え、クレーンは操作信号と荷役コマンドと最大電力に基づいて巻上部・走行部・横行部・起伏部の速度プロファイルを生成しこれより位置指令を生成して各部のインバータに位置指令を送信しインバータから状態情報を受信するクレーンコントローラと、商用電源から第1直流電源を生成するコンバータと、第1直流電源から前記位置指令に基づいて交流電源を生成し巻上部・走行部・横行部・起伏部のモータを駆動する複数のインバータと、第1直流電源と第2直流電源の間にあり双方向に電力を変換するチョッパと、第2直流電源に接続した蓄電部と、を備えた。
(もっと読む)
駆動力制御装置
【課題】小型の電気自動車に適した走行安定性の向上を図ることができる駆動力制御装置を提供する。
【解決手段】横加速度センサ41から横加速度52を入力し(S1)、横加速度52の作用方向から旋回方向を判別する(S2)。左旋回の場合(S3)、横加速度52が所定横加速度以上であり所定値71を越えているか否かを判断し(S4)、所定値71未満の場合、外輪側である右ホイールインモータ22の供給電流を低下し、右ホイールインモータ22から出力される駆動力を低下する(S5)。これにより、左ホイールインモータ21で駆動される左フロントタイヤ14と右ホイールインモータ22で駆動される右フロントタイヤ15とにおいて、左右駆動力差ΔFが発生し(S6)、この左右駆動力差ΔFにより電気自動車2に旋回復元モーメント(M)を発生させる(S7)。
(もっと読む)
テーブルの制御方法およびその装置
【課題】ガントリータイプのテーブルにおいて、塗布速度への立ち上げが指令速度に対して遅れるために有効な塗布面を得るには塗布速度の高速化や除外距離(塗布を始めてから塗布膜厚の変動率が要求仕様に収まるまでの走行距離)の短縮も望まれており、速度制御への要求内容は厳しいものとなっているため、これに対応する。
【解決手段】クロスカップリング制御とゲイン切替制御の方式において、塗布速度到達時のオーバーシュートをおさえ、それ以降は速度ムラをおさえるために、中心速度コントローラのゲイン切替のみを行っていたが、左右偏差コントロールのゲインを加速時に大きくして加速終了後に小さくした。
(もっと読む)
モータ駆動システム
【課題】個々に昇圧機能を有するモータ駆動装置の電気定数や運転状態に応じて、昇圧動作の責務を任意かつ動的に振り分けて回路損失の最小化を可能としたモータ駆動システムを提供する。
【解決手段】多相電圧形インバータINV1と、その直流入力端子に接続された平滑コンデンサC1と、インバータINV1の交流出力端子に固定子巻線がスター結線されたモータM1と、前記固定子巻線の中性点とインバータINV1の直流母線の一方との間に接続されたバッテリBATTと、を有し、かつ、バッテリBATTの電圧を昇圧して平滑コンデンサC1に供給する昇圧機能を備えたモータ駆動装置101,102を複数台備えてなるモータ駆動システムにおいて、モータM1,M2の中性点を共通接続すると共に、直流母線の正側及び負側をそれぞれ共通接続し、昇圧動作により各モータM1,M2の中性点に流れる零相電流の分配率を制御可能とする。
(もっと読む)
ツイン・ドライブ制御装置及び捻り振動抑制方法
【課題】負荷を両側から同期モータで駆動する場合、2台の同期モータの初期磁極位相が異なるときであっても、負荷の捻り振動を抑制可能なツイン・ドライブ制御装置及び捻り振動抑制方法を提供する。
【解決手段】回転位相補正手段74が、同期モータ6A,6Bの初期磁極位相θ1,θ2を考慮して回転位相を補正し、座標変換器75が、補正後の回転位相を用いて、共通する単一の3相正弦波電圧指令V*u,V*v,V*wを生成する。PWM制御器56が、3相正弦波電圧指令V*u,V*v,V*wに基づいて単一のPWM信号Vup,Vvp,Vwpを生成し、電力変換器57,76が、PWM信号Vup,Vvp,Vwpに基づいて同期モータ6A,6Bの電力制御をそれぞれ行う。これにより、同期モータ6A,6Bの初期磁極位相が異なるときであっても、発生トルクを同一にすることができ、負荷の捻り振動を抑制することができる。
(もっと読む)
1 - 20 / 30
[ Back to top ]