
Fターム[5J062CC14]の内容
Fターム[5J062CC14]に分類される特許
1 - 20 / 171
移動体の向きを特定する方法、及び移動体の向きを特定するシステム
位置標定システム、移動端末、及び位置標定システムの制御方法
位置標定方法、及び位置標定システム
位置標定方法、及び位置標定システム
【課題】簡素な方法により移動体の位置の標定精度を向上させる。
【解決手段】基地局20に第1のアンテナ対と第2のアンテナ対とを、第1のアンテナ対の各アンテナ251a,251bによって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251c,251dによって受信される位置標定信号900の経路差とが一致するように設け、第1のアンテナ対によって受信される位置標定信号900の位相差Δθ1を測定し、第2のアンテナ対によって受信される位置標定信号900の位相差Δθ2を測定し、測定した位相差Δθ1と位相差Δθ2とに基づき、移動端末30から受信した位置標定信号が直接波であるか否かを判定する。また位相差Δθ1と位相差Δθ2とが一致する場合に、位相差Δθ1もしくは位相差Δθ2から求まる移動端末30の位置を、移動端末30の現在位置として取得する。
(もっと読む)
位置標定方法、及び位置標定システム

【課題】簡素な方法により移動体の位置の標定精度を向上させる。
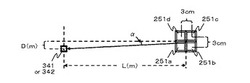
【解決手段】基地局20に複数のアンテナ251を隣接配置し、移動端末30に第1アンテナ341及び第2アンテナ342を間隔Sだけ離間させて配置する。基地局20はアンテナ251の夫々により第1アンテナ341から送られてくる位置標定信号900を受信し、各アンテナ251の受信信号の位相差に基づき第1アンテナの位置P1を求め、複数のアンテナ251の夫々により、第2アンテナ342から送られてくる位置標定信号900を受信し、各アンテナ251の受信信号の位相差に基づき第2アンテナの位置P2を求める。基地局20は、求めた位置P1と位置P2の差の絶対値(|P1−P2|)を間隔Sと比較し、第1アンテナ341又は第2アンテナ342から送信された位置標定信号900が直接波であるか否かを判定する。
(もっと読む)
移動体通信端末、その所在推定方法及びプログラム
【課題】一般的な移動体通信端末を被捜索側端末として使用可能な移動体通信端末の所在推定方法、及び、その方法にて捜索側端末として用いる移動体通信端末、そのプログラムを提供する。
【解決手段】移動体通信システムの端末。他端末である被捜索側端末が、基地局を宛先として送信した上り無線信号を受信し、上り無線信号の電界強度を計測して計測結果を取得して、計測結果に基づいて被捜索側端末が所在する方向を推定する。
(もっと読む)
端末位置判定装置および端末位置判定システム
【課題】車車間通信や歩車間通信によって端末間でやり取りされるGPS位置情報のような衛星を用いた位置情報の信頼度を判定する構成を提供する。
【解決手段】車車間通信部32が受信した他の端末のGPS位置情報と取得部33が取得した他の端末の移動速度および走行方向に基づき、推定部34によりGPS位置情報に基づく他の端末の存在位置を基準にして、つぎの時刻の他の端末の存在位置を推定し、判定部35により、推定部34が推定した他の端末のつぎの時刻の推定位置と、車車間通信部32がつぎの時刻に受信したGPS位置情報に基づく他の端末の存在位置との一致度に基づいて、他の端末から受信するGPS位置情報の信頼度を判定する。
(もっと読む)
雷発生位置標定装置および雷発生地域推定方法
【課題】雷の発生位置を広範囲のエリアにわたって、精度良く測定または推定する。
【解決手段】雷発生位置測定システム1は、雷放射観測装置110と雷発生位置標定装置10とで構成される。複数の雷放射観測装置110は、雷の観測対象のエリアに配置され、雷の発生位置の方向を示す仰角および方位角の時系列、当該時系列の時刻、観測地点の位置情報、および送信元を識別する識別情報を含む観測データを雷発生位置標定装置10に送信する。雷発生位置標定装置10は、観測データを受信し、識別情報の異なる仰角の時系列の間で、当該仰角の時系列の時刻の間隔および仰角の値が類似するか否かを判定し、類似すると判定した2つ以上の前記識別情報の異なる観測データを用いて、雷の発生位置を標定する。
(もっと読む)
測位装置及び測位方法
【課題】ターゲットの測位精度を高めることができる測位装置及び測位方法を得ることを目的とする。
【解決手段】測位処理部8によるターゲットの測位値を用いて、測角観測部2により観測された全ての測角値の残差及び電力観測部3により観測された全ての電力観測値の残差を算出して、全ての測角値の残差と全ての電力観測値の残差との総和を算出する残差総和算出部9を設け、グループ更新処理部10が、残差総和算出部9により算出された残差の総和が最小になるように、各測角値の属するグループを更新する。
(もっと読む)
3次元形状導出装置および3次元形状導出方法
【課題】センサネットワークを用い、カメラやレーザでは測定困難な部位の形状までも導出する。
【解決手段】3次元形状導出装置100は、自体の3次元位置またはそれに相当する物理量を示す位置情報を発信する流動自在な複数の位置センサ112と、複数の位置センサを包容する包容体(ハンド92)と、複数の位置センサが発信した位置情報を受信するセンサ情報集約部114と、包容体の3次元形状を、複数の位置センサの位置情報に基づいて導出する3次元形状導出部130とを備える。
(もっと読む)
情報制御システム
【課題】コスト増大を招くことのない安価なシステム構成で、通信端末からの送信情報の内容を当該通信端末の位置する領域に応じて制限する。
【解決手段】建造物内の複数のフロアを移動可能な少なくとも1つの通信端末1と、通信端末1と無線通信可能なセンター装置2と、を有する情報制御システムSであって、通信端末1は電波信号を発し、センター装置2は、建造物内の所定の測定地点に設けられ、アレイアンテナ3を有し、通信端末1の電波信号の発信点を特定するための第1処理段階G1、第3処理段階G3、第4処理段階G4、第5処理段階G5及び第6処理段階G6とを実行し、さらに発信点の特定結果に基づき通信端末1が存在するエリアを検出し、この検出結果に基づき、通信端末1から送信される電波信号に含まれる外部送信データの内容を制限する。
(もっと読む)
サービス情報提供システム
【課題】コスト増大を招くことのない安価なシステム構成で、通信端末の位置するサービス領域に応じた最適なサービス情報を提供する。
【解決手段】建造物内の複数のエリアを移動可能な通信端末1と、通信端末1と無線通信可能なセンター装置2と、を有するサービス情報提供システムSであって、通信端末1は位置検出用電波を発し、センター装置2は、建造物内の所定の測定地点に設けられ、通信端末1の位置検出用電波の発信点を特定するとともに発信点の位置と、発信点からの位置検出用電波に含まれるID情報とによる特定結果に基づき、通信端末1が存在するエリアを検出し、この検出結果に基づき、対応したエリア情報を通信端末1へ送信し、通信端末1は送信されたサービス情報を表示する。
(もっと読む)
電波推定方法、及び電波推定プログラム、並びに電波推定装置
【課題】発信点推定における推定精度を大きく向上する。
【解決手段】電波の発信点TPを推定する電波推定方法であって、建造物H内に位置する所定の受信点RPから、ビームフォーミングによりアレイアンテナ3の指向性を制御しつつ、所定の受信角範囲における全ての方向にわたって電波を受信する第1処理段階G1と、この受信した全ての方向に含まれる複数の主要到来角それぞれに対し、受信点RPからレイトレーシング法により光を仮想的に仮想光線として放射し、建造物H内の仮想電波伝播経路を算出する経路図において、建造物Hの構造及び各構造材の材質を仮想電波伝播経路を算出するパラメータとして用いて、放射した複数の仮想光線の中から異なる任意の2仮想光線を選択する組み合わせによって抽出された2仮想光線がお互いに最も近づいた位置を経路図上の近接点として、近接点を全て抽出する第3処理段階G3及び第4処理段階G4とを有する。
(もっと読む)
位置情報の決定
【課題】物体から受信機の一つへの直接信号が遅延した反射信号と比べて弱い場合でも精度良く物体の位置を決定する。
【解決手段】複数の受信エレメントを含む、受信するための手段と、受信エレメントで受信された信号106を検出し、受信信号を表す出力信号を生成するための検出手段と、各受信エレメントごとに、他の任意の受信エレメントで受信される信号から生成される任意の出力信号とは別に、その受信エレメントで受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号106を表すパラメータのそれぞれの値を得るように動作可能な処理手段とを含み、処理手段はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得する。
(もっと読む)
医療システムに用いられる無線検出器のシステム及び方法
【課題】 有限的な無線範囲、チェーンサーキット品質の低下及び複数の無線検出器管理の複雑なプロセスを解決するために、医療システムに用いられる無線検出のシステムを提供する。
【解決手段】 該システムは、無線検出器から周期的に発射する標識メッセージを受信し、受信された標識メッセージに基づいて無線検出器の情報を獲得する少なくとも3つのホストコンピューターワイヤーアダプタ(501,502,503)と、少なくとも3つのホストコンピューターワイヤーアダプタからの無線検出器に関する情報を受信し、無線検出器の位置を確定するコントローラ(504)と、を備える。該方法は、少なくとも3つのホストコンピューターワイヤーアダプタが無線検出器から周期的に発射する標識メッセージに基づいて無線検出器に関する情報を獲得し、無線検出器の位置を確定する。
(もっと読む)
1つ以上の基地局に関して無線移動装置の位置を推定すること
【課題】一つ以上の基地局に関して無線移動基地局の位置を推定する方法を提供する。
【解決手段】複数の基地局(BTS)を持っている通信網において移動装置(MS)の位置を推定する第1の方法は、MSがBTSのうちの1つのみと通信することができるエリアを決定する。そのエリア内の平均位置が計算され、推定として使用される。第2の方法はMSが2つのBTSのオーバーラップしているカバレージエリア内にあるエリアを決定する。各BTSからMSによって受信された信号の到着の相対時間差が一定の距離点の軌跡が決定される。MSで、1つのBTSの第1および第2のセクター間の相対的な信号電力に基づいた角度θを有する線が、軌跡と交差する点が決定され、MSの位置の推定として使用される。
(もっと読む)
電波監視装置、及び電波監視方法
【課題】広域の監視対象エリアから監視対象(電波発射源)の位置を推定する際に、複数の方位センサの中から最適な方位センサを自動で選択する。
【解決手段】監視対象エリア1における監視対象2の位置を特定する位置特定情報(緯度・経度等)20bを、位置関連情報(住所・郵便番号等)20aと関連づけてデータベース20に登録する。位置検索部17は、監視対象2の位置関連情報20aを基にデータベース20を検索し、監視対象2の概略位置を特定する。最適センサ選択部18は、位置検索部17により特定された監視対象2の位置から各方位測定部(方位センサ)15までの距離を算出し、監視対象2からの距離が近い順に方位測定部15を2つ以上選択する。発射源位置推定部19では、選択された各方位測定部15により測定されたそれぞれの発射源方位の交点を求めることにより、監視対象2の位置を推定する。
(もっと読む)
測位方法
【課題】パルスが周期的に出現する場合を想定して、測角値の残差に加えてPRI情報(パルス送信周期)を併用することにより、グルーピングおよび測位精度を向上させた測位方法を得る。
【解決手段】移動プラットホームPから、発信源を有する複数のターゲットT1、T2に関する測角値θ(tk)(k=1、2、・・・、K)を、各発信源にグルーピングして測位するために、発信源からの各パルスに基づく測角値θ(tk)と、各パルスの送信周期に相当するPRI情報とを併用したグルーピングを用いることを特徴とした測位方法である。
(もっと読む)
位置教示システム
【課題】携帯端末の大型化を抑制しつつ、マルチパスに対応可能である位置教示システムを提供する。
【解決手段】カーファインダシステム3は、車両2に設けられた複数の発信アンテナから電子キー1側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、電子キー1に設けられたアレーアンテナ15aが受信することで、車両2の各発信アンテナから発信された信号を平均化処理して、到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部11bを備える。そして、カーファインダシステム3は、位置推定部11bが演算した位置情報を表示部19によって使用者に教示する。
(もっと読む)
位置教示システム
【課題】対象物及び携帯端末の構成が簡易であるとともに、携帯端末の大型化が抑制された位置教示システムを提供する。
【解決手段】カーファインダシステム3は、電子キー1に設けられた複数のアンテナ14a,14b,14cから車両2側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、車両2に設けられたアンテナが受信することで、車両2のアンテナから発信された探索信号Sseを電子キー1が同時受信したかのように取り扱うとともに、探索信号Sseから到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部21bを備える。そして、カーファインダシステム3は、位置推定部21bが演算した位置情報を車両2から発信し、位置情報を電子キー1が受信して表示部19によって使用者に教示する。
(もっと読む)
1 - 20 / 171
[ Back to top ]