
Fターム[5J062DD05]の内容
Fターム[5J062DD05]に分類される特許
261 - 280 / 377
移動体位置測位装置
【課題】測位モードを適切に切り替えて精度の高い測位を行うこと。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号のコード位相に基づいて移動体の位置を測位する第1測位手段と、前記移動体の位置に関する情報を取得する位置情報取得手段と、前記位置情報取得手段により取得された位置情報と、衛星からの搬送波の周波数のドップラ成分の計測値とに基づいて、移動体の位置を測位する第2測位手段と、前記第1測位手段による第1測位モードと前記第2測位手段による第2測位モードとを切り替えるモード切替手段とを備え、前記モード切替手段は、前記位置情報取得手段により所定レベル以上の信頼性の高い位置情報が取得された場合に、前記第1測位手段による第1測位モードから前記第2測位手段による第2測位モードに切り替えることを特徴とする。
(もっと読む)
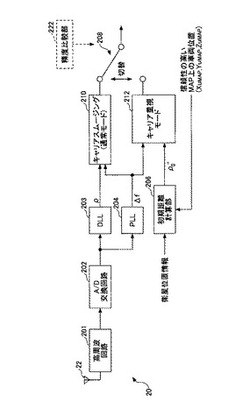
BOC変調無線航法信号を受信する方法および装置
本発明は、周波数fpの搬送波、周波数fspの副搬送波および周波数fcの疑似ランダムコードによって変調された航法用無線信号の受信機および受信方法であって、該無線信号が2つの信号路I、Qでベースバンドに変換される受信機および受信方法において、K個(K=α・fsp/fc、ただしαは所定の整数)の変形疑似ランダムコードが変形コード発生器(23)によってローカルに生成され、それぞれの変形コードは時間Tk(Tk=1/α・fsp)に副搬送波なしの疑似ランダムコードの形をなし、前の変形疑似ランダムコードから間隔時間Tkだけ時間的にシフトされており、信号はそれぞれの信号路でK個の変形コードを掛け合わされ、ローカルに生成される同相および直交相の2つの副搬送波によって同相および直交相で相関されることを特徴とする受信機および受信方法に関する。  (もっと読む)
(もっと読む)
測位装置、電子機器、フィルタ通過帯域可変方法、プログラム及び記憶媒体

【課題】受信感度と測位精度との両立を図ること。
【解決手段】RF受信回路部10において、GPS衛星からの受信信号が、通過帯域が広狭異なる複数のフィルタを有するフィルタ部15に通されることで、GPS衛星信号の周波数帯を含む信号が抽出された後、ベースバンド処理回路部20に出力される。また、RF受信回路部10から出力された信号の信号強度に基づいて、ベースバンド処理回路部20により、フィルタ部15のフィルタが択一的に切り替えられるとともに、RF受信回路部10から出力された信号に基づいて、携帯型電話機1の現在位置が測位される。
(もっと読む)
衛星ナビゲーションデータのサブフレームを収集する方法及び装置
【課題】 衛星通信の初期測位時間(TTFF)性能を改善するため、衛星ナビゲーションデータのサブフレームを収集する方法を提供する。
【解決手段】 方法は、(a)複数のサブユニットに分けられるワードを備えたサブフレームを受信するステップと、(b)各サブユニットが有効か否かを検査するステップと、(c)有効なサブユニットから所要のサブユニットを収集するステップと、(d)上記サブフレームの所要のサブユニットが収集されたか否かを判断するステップと、(e)上記サブフレームの所要のサブユニットが未だに全部収集されていない場合に、サブフレームの再送を待って欠落したサブユニットを収集するステップとを含む。
(もっと読む)
衛星航法装置、外部基地局、及び衛星測位システム
【課題】衛星信号の受信環境が悪化した場合であってもTTFFを改善することができる衛星航法装置、外部基地局、及び衛星測位システムを提供する。
【解決手段】GPS衛星35は衛星信号を送信し、基地局30は衛星信号を受信するGPS信号受信部33と、航法データを所定のデータフォーマットに変換する変換部32と、変換された補助情報をGPS受信機10へ送信する基地局送信部31と、アンテナ36と、を有し、GPS受信機10(衛星航法装置)に対して補助情報を提供する。GPS受信機10は、アンテナ24と、周波数変換部11と、擬似距離測定部12と、航法データ復調部15と、航法データ記憶部21と、時計部17と、受信制御演算部14と、衛星送信時刻予測部16と、測位演算部13と、アンテナ23と、外部情報受信部22と、変換部19と、外部航法データ記憶部18と、を有している。
(もっと読む)
設定環境で測位するためのシステムおよび方法
本発明は全地球航法衛星システムの信号が利用できない設定環境で位置決定を提供するシステムおよび方法に関する。この点に関して、狭域の標識信号のシステムは、傍受されたエネルギーの相関関係を必要とせずに既知の拡散符号によって、物理的に有意義な観測量を導き出すスペクトル圧縮のユニットによって受信されるスペクトラム拡散CDMA信号を生成する。本発明は既に配置されている通信資産と共存することができ、設計は自己校正を可能にするので、設置と使用法が単純化される。本発明は、例えば、倉庫在庫管理、捜索救難活動、屋内環境内での資産追跡において、GNSS信号が利用できない、あるいは制限されているところでの応用に便利である。 (もっと読む)
相関演算制御回路及び相関演算制御方法
【課題】 受信信号とレプリカコードとの相関値を算出する相関処理において、相関値の積算の飽和が検出されたときに積算を停止させるか否かを飽和の原因に応じて適切に制御すること。
【解決手段】 コヒーレント積算部41では、メモリ31に格納されたIF信号と、コード生成部32により生成されたレプリカC/Aコードとが、ミキサ42より合成されて相関値が算出され、相関値が積算部43に積算される。そして、積算回数モニタ部46は、積算部43の積算回数を計数するとともに、飽和時制御部45により相関値の積算の飽和が検出された場合、積算回数が基準回数以下ならば積算部43の積算を停止させ、積算回数が基準回数を超えているならば積算を停止させない。
(もっと読む)
衛星測位方法及び衛星測位システム
【課題】 減衰した衛星受信信号であっても超高感度でかつ応答性良く自己位置を知るこ
とができ、しかも、衛星の正確な位置に基づいて自己位置の計算ができ、精度が極めて高
い衛星測位方法を提供することを目的とする。
【解決手段】 衛星Sからの信号を受信すると共に外部基地局1との間において情報通信
する受信機端末11が自己位置の計算を行う衛星測位方法である。衛星Sから受信機端末11
が受信した衛星受信信号の航法データと外部基地局1から受信機端末11が受信した外部航
法データとを比較して、外部航法データの遅延時間を算出する。遅延時間に基づいて受信
機端末11が衛星受信信号を処理する際の衛星位置を推定する。推定した衛星位置に基づい
て擬似距離を求め自己位置の計算を行う。
(もっと読む)
測位回路、電子機器、測位方法及びプログラム
【課題】 二次元測位で用いられる高度データを改良して、データ量の削減や検索速度の向上を図ること。
【解決手段】 GPS衛星信号に基づく測位演算は、先ず三次元測位が行われ、三次元測位が失敗すると、高度テーブルを検索して得られた高度に基づく二次元測位が行われる。高度テーブルは、地形に設定した複数の地域50それぞれに高度を定義したデータテーブルであり、「100m」といった高度が定義された高度有りテーブルと、高度が定義されない高度無しテーブルとがある。地域50はその大きさが任意に設定可能な矩形形状であるとともに、複数の地域50の重畳(重ね合わせ)が許容されている。また、高度テーブルそれぞれには定義されている高度の高い順に優先順がつけられ、この優先順に従って格納されている。そして、高度テーブルの検索は、格納順即ち定義されている高度が高い順に行われる。
(もっと読む)
時計装置及び閏秒補正方法
【課題】閏秒補正データを確実に受信して閏秒補正することである。
【解決手段】GPS衛星から送信された航法データの中からサブフレーム及びページの各識別情報と時刻情報とを取得し、このサブフレーム及びページの各識別情報と時刻情報とから、当該サブフレーム以降のサブフレームに含まれる閏秒補正データを受信するまでの時間を算出し、この閏秒補正データを受信するまでの時間に基づいて、閏秒補正データを受信する受信タイミングになったか否かを判別し、受信タイミングとなったと判別された場合に、GPSモジュールに航法データを受信させ、受信された航法データ中のサブフレームに含まれている閏秒補正データを取得し、この閏秒補正データに基づいて、計時部の内部時刻データの閏秒を補正する。
(もっと読む)
移動体用測位システム及びこれに用いる装置
【課題】早期に擬似距離のばらつきを収束させること。
【解決手段】第1移動体に設けられ、衛星からの信号の受信結果に基づいて該衛星と該第1移動体との間の擬似距離を算出する第1擬似距離算出手段と、第2移動体に設けられ、前記衛星からの信号の受信結果に基づいて該衛星と該第2移動体との間の擬似距離を算出する第2移動体側擬似距離算出手段と、前記第1移動体及び前記第2移動体のうちの少なくとも一方の移動体に設けられ、前記第1移動体と前記第2移動体との間の距離を算出する手段と、前記算出された衛星と第2移動体との間の擬似距離、及び、前記算出された第1移動体と前記第2移動体との間の距離を用いて、前記第1移動体と衛星との間の擬似距離を算出する第2擬似距離算出手段と、前記第1及び第2擬似距離算出手段によりそれぞれ算出された擬似距離を結合して、1つの結合擬似距離を算出する結合擬似距離算出手段と、該結合擬似距離算出手段により算出された前記結合擬似距離を用いて前記第1移動体の位置を測位する測位演算手段とを備える。
(もっと読む)
相互相関拒否を有するGNSS受信機
【課題】
無線位置測定受信機が、複数の相関タップ及び相互相関を検出するモジュールを有する。
【解決手段】
このモジュール内では、スプリアス状の相関項が、候補ピークの周波数の統計学的な分析によって検出される。このシステムは、周波数が相互相関信号の外側にあるタップに対してさらなる積分を制限するか又は相互相関状況の検出時に異なるスペース・ビークルの新たな取得を開始する。
(もっと読む)
測位装置、電子機器及びプログラム
【課題】精度と感度とを両立させた測位を実現すること。
【解決手段】フィルタ部70の通過帯域の異なる2種類のフィルタそれぞれから出力され
た信号がメモリ部80の異なるメモリにそれぞれ記憶され、当該メモリに記憶されている
信号に基づいて測位処理が行われる。具体的には、コヒーレント積算処理及びインコヒー
レント積算処理が行われることで受信信号の信号強度が算出され、当該信号強度に対して
閾値判定が行われることで、測位に用いる信号系統が高感度系統S1又は高精度系統S2
に択一的に切り替えられる。
(もっと読む)
衛星ナビゲーション受信機用適応符号発生器
可調節符号発生器を含む衛星ナビゲーション・デバイス110について記載する。可調節符号発生器は、スペクトル拡散符号信号の集合を発生するように構成することができる。各スペクトル拡散符号信号は、それぞれの周期に対応するそれぞれの長さを有する。スペクトル拡散符号信号の集合は、別個の第1及び第2長を有する第1及び第2スペクトル拡散符号信号を含む。 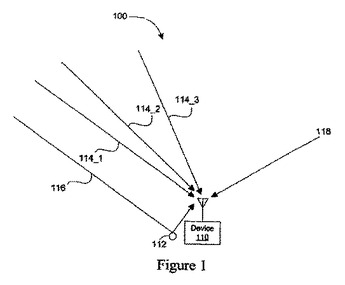 (もっと読む)
(もっと読む)
測位装置、電子機器及びプログラム
【課題】感度の向上と処理時間の短縮化とを両立させた測位を実現すること。
【解決手段】リングバッファであるメモリの格納領域から、読出位置をずらして所定時間
分のスライス組が取得され、当該スライス組それぞれの信号強度合計値が算出される。そ
して、最高強度スライス組に含まれるスライスの信号強度及び当該最高強度スライス組の
前後のスライスそれぞれの信号強度が算出され、最高強度スライスの読出オフセットに基
づいて、最終的な信号読出位置が決定される。そして、決定された信号読出位置から読み
出されたスライスに基づいてGPS衛星信号の捕捉及び追尾が行われて、所定の測位処理
が行われる。
(もっと読む)
位置情報提供システム、位置情報提供装置および送信機
【課題】電波が届かない場所において位置情報を提供する。
【解決手段】位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S630)と、そのデータから座標値を取得するステップ(S632)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
受信装置および受信制御方法
【課題】使い勝手がよく、しかも小型化が可能な受信装置を提供する。
【解決手段】GPS衛星のアルマナック情報を衛星データROM6に記憶しておき、使用開始時点では、それをSRAM7へ転送することにより、アルマナックデータの取得作業を廃止する。また、衛星データROM6内のデータが無効となった場合には、それを示すフラグをEEPROM12のフラグ領域12bに書き込み、使用を中止する。同時に、GPS部3により新たなアルマナック情報を取得し、それをEEPROM12の衛星データ記憶領域12aに記憶するとともに、以後は、そのデータを使用する。アルマナック情報の保持に必要な二次電源が不要となる。また、GPS部3の受信動作終了後には、エフェメリスが有効な所定時間だけ主電源からSRAM7へ電力を供給し、その後は電源を遮断する。
(もっと読む)
測位装置および測位方法
【課題】受信機時計誤差による影響を抑圧して受信機位置を推定する単独測位装置および単独測位方法を提供する。
【解決手段】入力された各観測値、すなわち、選定された各GPS衛星に対するL1波のキャリア位相、L2波のキャリア位相、C/Aコードのコード擬似距離、PYコードのコード擬似距離、時計誤差情報、電離層遅延情報、対流圏遅延情報を目的変数とし、整数値バイアス、および受信機位置を説明変数に含む線形回帰方程式を構成する。この際、従来時計誤差に含まれていた搬送波信号毎、コード毎の受信機バイアスを時計誤差から分離して線形回帰方程式に加える。そして、この線形回帰方程式に最小二乗法を適用させて、整数値バイアスと受信機位置とを推定演算する。
(もっと読む)
3つのGPS周波数を用いて整数値サイクル(whole−cycle)搬送波位相アンビギュイティを解消する方法
配置非依存であり、屈折が補正され、アンビギュイティが解消された、搬送波位相測定値を取得するための新たな3種周波数技法が記載されている。まず、少なくとも2つのワイドレーン搬送波位相測定値差異に対するアンビギュイティを、対応する周波数加重コード測定値を平均化することによって取得する(210)。そして、これらの2つのアンビギュイティが解消された測定値を結合して、屈折が補正された合成測定値を形成する(220)。結果としての合成測定値は、元の搬送波位相測定値におけるマルチパス・ノイズの増幅に起因して極めてノイズが多い。しかしながら、このノイズの多い屈折が補正された搬送波位相測定値を、別の、ノイズが最小であり、屈折が補正された搬送波位相合成測定値を用いて平滑化することができる。ノイズが最小であり、屈折が補正された合成測定値を、それらの整数値サイクルアンビギュイティを解消する前に初期搬送波位相測定値から構成する(230)。2つの屈折が補正された測定値の差異を平滑化する(240)ことによって、ノイズを低減することができ、低ノイズ測定値におけるバイアス(不正確なアンビギュイティに起因する)を推定して後に補正することができる。 (もっと読む)
衛星信号判定装置
【課題】衛星航法システムにおいて、それぞれ同一の情報を含む2周波の信号が同一衛星から同時に出力される場合に、当該2周波の信号がどの衛星から発せられたかの判定を、正確、簡易に、かつ効率よく行うようにする。
【解決手段】 各チャンネルにおいて、次のような処理を行う。受信装置6では、L1信号のPNコードと所望する衛星のPNコードとの相関値を計算し、当該相関値のピークが第1閾値を越えたか否かによりL1信号が所望する衛星のものであるか否かを判定する。所望する衛星のものと判定したときは、L1信号判定部11では、所望する衛星の所望する以外の衛星のキャリア周波数の比較及び信号レベルの比較により、L1信号が所望する衛星のものか否か判定する。この判定を前提として、L2信号判定部12では、受信信号の送信時刻によりL2信号が所望する衛星のものか否か判定する。
(もっと読む)
261 - 280 / 377
[ Back to top ]