
Fターム[5J062DD05]の内容
Fターム[5J062DD05]に分類される特許
241 - 260 / 377
移動体用測位装置

【課題】ドップラ周波数の計測値のバイアス成分の影響を適切に除去して測位精度を高めること。
【解決手段】本発明は、移動体に搭載される移動体用測位装置において、衛星からの搬送波のドップラ周波数の計測値に含まれるバイアス成分を推定するバイアス算出部206と、前記バイアス算出部206から得られるバイアス成分の推定値と、前記ドップラ周波数の計測値とに基づいて、衛星と移動体との間の距離を算出する衛星−車両間距離算出部212と、前記衛星−車両間距離算出部212により算出される衛星移動体間距離に基づいて、移動体の位置を測位する測位演算部214とを備えることを特徴とする。
(もっと読む)
通信基地局、その制御方法、その制御プログラム及び記録媒体、及び、測位装置

【課題】通信基地局と通信可能な測位装置に対して、通信基地局におけるコードフェーズを使用することが妥当である条件を満たした場合にのみ、通信基地局におけるコードフェーズを提供することができる通信基地局等を提供すること。
【解決手段】通信基地局40は、測位装置20との間を通信電波が伝播する伝播時間が予め規定した時間許容範囲内か否かを判断する伝播時間評価手段と、各衛星信号のコードフェーズを算出するコードフェーズ算出手段と、通信基地局40が算出したコードフェーズと測位側コードフェーズとの差分を算出する差分算出手段と、差分が、マルチパスの影響を受けている場合の差分範囲であるマルチパス影響範囲内か否かを判断する差分評価手段と、差分評価手段によって、差分がマルチパス影響範囲内であると判断した場合に、通信基地局40が算出したコードフェーズを測位装置20に送信する補正値送信手段等を有する。
(もっと読む)
無線ナビゲーション信号を処理する方法
【課題】未処理コードおよび位相の測定からスタートし、(地上のまたは軌道内の)受信機によって行われる微分されていない測定値の位相の不確定性を解くこと
【解決手段】衛星コンステレーションのうちの衛星の各々は、別々の周波数にて、第1無線ナビゲーション信号および第2無線ナビゲーション信号を送信する。衛星を見ることができる基準ネットワークのうちの各局は、衛星から発信された2つの信号の各々に対するコードおよび位相の非微分測定を実行し、これらの測定値から、ワイドレーンの不確定性の未処理値を推定する。この未処理値に基づき、ネットワークにおいて、衛星の内部遅延およびワイドレーンの不確定性の全値を決定する。この方法は、前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相不確定性の未処理値を計算するステップと、前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相不確定性の整数値と共に衛星内部遅延を固定するステップとを備える。
(もっと読む)
移動体測位装置
【課題】衛星毎に異なる誤差を精度良く反映する指標値を用いて、測位に用いる衛星を適切に選択すること。
【解決手段】本発明は、移動体に搭載され、該移動体の位置を測位する移動体用測位装置において、移動体に搭載されるセンサの出力信号により移動体が停止しているか否かを判定する移動体停止判定手段と、前記移動体停止判定手段により移動体が停止していると判定されている間に観測される衛星電波の観測値を用いて、移動体の速度を、衛星毎に導出する移動体速度導出手段と、
前記移動体速度導出手段により導出された衛星毎の移動体速度に基づいて、測位に用いる衛星を選択する衛星選択手段とを備えることを特徴とする。
(もっと読む)
移動局の静止判定を利用した位置検出システム
【課題】移動局の静止判定を用いた精度が高い位置検出システムを提供する。
【解決手段】移動局において、フレーム識別手段によりフレーム識別情報が付され、静止判定手段により移動局が静止しているか否かが判定され、少なくともフレーム識別情報と静止判定手段による結果とを含む信号が発信される。基地局において、基地局情報送信手段により、少なくとも基地局識別番号と受信されたフレーム識別情報と距離関連情報測定手段による距離関連情報とからなる基地局情報が測位サーバに送信される。測位サーバにおいては、距離関連情報測定誤差算出手段により、移動局が静止している場合には基地局情報に基づいて距離関連情報測定誤差が算出され、重み行列算出手段により距離関連情報測定誤差に基づいて重み行列が算出され、測位手段において距離関連情報と重み行列とに基づいて移動局の位置が算出される。
(もっと読む)
拡散信号受信装置
【課題】受信した拡散信号にマルチパスが含まれている場合でも、擬似乱数コードの正確な位相を算出する。
【解決手段】基準相関値算出部150は、相関器130が測定した相関値に基づいて、基準相関値を算出する。相関値差分算出部160は、相関器130が測定した相関値と、基準相関値算出部150が算出した基準相関値との差分(相関値差分値)を算出する。マルチパス推定部170は、相関値差分算出部160が算出した相関値差分値に基づいて、マルチパスの位相や強度を推定する。弁別値目標値算出部180は、マルチパス推定部170の推定結果に基づいて、弁別値目標値を算出する。位相調整部190は、相関器130が測定した相関値から算出した弁別値が、弁別値目標値算出部180が算出した弁別値目標値と一致するよう、擬似乱数コード発生器120が生成する擬似乱数コードの位相を調整する。
(もっと読む)
移動体用測位装置及び移動体用測位方法
【課題】マルチパス発生時にも精度良く測位すること。
【解決手段】本発明による移動体用測位装置は、擬似距離算出手段203と、衛星と移動体との間の距離の初期値に、衛星電波の観測値から求まる衛星と移動体の間の距離の変化量(以下、距離変化量という)を積算して、衛星と移動体との間の距離を算出する衛星移動体間距離算出手段212と、前記擬似距離算出手段による第1距離算出モードと前記衛星移動体間距離算出手段による第2距離算出モードとを切り替えるモード切替手段208と、衛星電波の直接波とその反射波とからなる合成波の受信を検出する合成波検出手段206とを備え、前記モード切替手段は、前記合成波検出手段により前記合成波の受信が検出された場合に、前記第1距離算出モードから前記第2距離算出モードに切り替えることを特徴とする。
(もっと読む)
時間遅延測定
間に遅延がある対応する第1の信号と第2の信号とを処理する方法であって、少なくとも第1の信号はチップ境界を有する2進信号であり、当該方法は、連続する遅延量がチップ境界間の間隔未満だけ互いに異なり、第1の信号と第2の信号との間に複数の異なる遅延を導入することと、導入された遅延に従って値がいかに変化するかの表現(その表現は、第1の信号と第2の信号との間の遅延に対する所定の関係を有する導入された遅延に関連するレベル変化を含む)を取得するために、各導入された遅延に対し、少なくとも、同じ状態を有する第1の信号のビット間のチップ境界の時間において得られる第2の信号のサンプルを合計することとを含む。  (もっと読む)
(もっと読む)
時間CWヌラー
全地球測位システム(GPS)受信機の入力から狭帯域干渉/妨害電力を除去するか、または最小にする時間ヌラー(10)は、第1の入力および第1の出力を有する第1の信号パス(14)と、第1の信号パス内に位置する少なくとも1つの時間遅延デバイス(16)と、第2の入力および第2の出力を有する第2の信号パス(22)とを含む。第1の信号入力は第2の信号入力に接続され、第1の信号出力は第2の信号出力に接続されている。さらに、少なくとも1つの時間遅延デバイス(16)は、少なくとも1つの時間遅延デバイスの入力における信号に関して、少なくとも1つの時間遅延デバイスの出力における信号に時間遅延を導入するように動作する。さらに、第1の信号パスは、ヌルが現れる周波数を調整する調整可能な位相シフトデバイス(18)含んでいてもよい。  (もっと読む)
(もっと読む)
擬似衛星利用システム、携帯型GPS測位装置、制御方法、プログラム及び記憶媒体
【課題】GPS衛星信号及び擬似衛星信号を受信して現在位置を測位する際に、衛星信号の捕捉に要する時間の増加を防ぐこと。
【解決手段】GPS機能を有する携帯型電話機1では、捕捉される衛星信号に応じて、受信モードが「GPS衛星信号高配分モード」又は「擬似衛星信号高配分モード」に切り替えられる。「GPS衛星信号高配分モード」では、衛星信号を受信する8個の受信用のチャンネル(回路)のうち、7個のチャンネルでGPS衛星信号を受信し、1個のチャンネルで第1種擬似衛星信号を受信する。そして、捕捉したGPS衛星信号を基に現在位置を算出(測位)する。また、「擬似衛星信号高配分モード」では、4個のチャンネルでGPS衛星信号を受信し、4個のチャンネルで擬似衛星信号を受信する。そして、捕捉された擬似衛星信号に含まれる位置情報を現在位置とする。
(もっと読む)
GPS測位装置、電子機器、制御方法、プログラム及び記憶媒体
【課題】擬似衛星から発信される擬似衛星信号を受信して現在位置を測位する際に、現在位置の測位に要する時間の短縮を図ること。
【解決手段】GPS機能を有する携帯電話機1では、GPS衛星3から発信されるGPS衛星信号、及び擬似衛星5から発信される擬似衛星信号を基に現在位置が測位される。擬似衛星信号に基づく現在位置の測位では、捕捉した擬似衛星信号のPRNコードに対応する配置位置情報が記憶されているならば、この配置位置情報を基に現在位置が決定される。記憶されていないならば、捕捉した擬似衛星信号に含まれる配置位置情報が取得され、現在位置として決定されるとともに、この擬似衛星信号のPRNコードと対応付けて記憶される。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】電波強度が微弱な弱電界下において、測位基礎符号の位相の精度を検証したうえで、精度良く測位することができる測位装置等を提供すること。
【解決手段】各発信源ごとに少なくとも1つの周波数系列において測位装置20が発生するレプリカ測位基礎符号と測位基礎符号との相関処理を行って測位基礎符号の位相を算出する位相算出手段と、現在の前記位相を予測して予測位相を算出する予測位相算出手段と、現在の位相と予測位相との位相差が予め規定した位相差許容範囲内か否かを判断する位相差評価手段と、各発信源ごとに位相差が最小の位相を選択して選択位相とする位相選択手段と、選択位相の信号強度が最大か否かを判断する選択位相第1評価手段と、選択位相が属する周波数系列における前記位相が、連続して位相差許容範囲内であった回数が予め規定した規定回数範囲内であるか否かを判断する選択位相第2評価手段等を有する。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】信号強度が微弱な弱電界下において、測位基礎符号の位相の精度を検証したうえで、精度良く測位することができる測位装置等を提供すること。
【解決手段】測位装置20が発生するレプリカ測位基礎符号と測位基礎符号との相関処理を行って測位基礎符号の位相を算出する位相算出手段と、前回測位時の位相と、測位基礎符号を乗せた電波の周波数のドップラー偏移と、前回測位時からの経過時間に基づいて、現在の位相を予測して予測位相を算出する予測位相算出手段と、測位基礎符号の受信状態に基づいて、位相差許容範囲を決定する位相差許容範囲決定手段と、現在の位相と予測位相との位相差が、位相差許容範囲内か否かを判断する位相差評価手段と、位相差許容範囲内の前記位相差に対応する前記位相を使用して、現在位置を測位する測位手段と、を有する。
(もっと読む)
GPS信号強度計測装置
【課題】GPS微弱信号を実環境で計測する装置を実現する。
【解決手段】GPS信号強度計測装置100は、信号強度の強い屋外に設置されたAアンテナ1で受信されたGPS信号から得られるコード遅延、搬送波ドップラー、航法メッセージの情報を利用することで、微弱信号環境に設置されたBアンテナ2で受信されるGPS信号の「複数ビット長GPSレプリカ信号16」を生成する。GPS信号強度計測装置100では、B相関器17が「複数ビット長GPSレプリカ信号16」とBアンテナ2で受信されるGPS信号との相関処理を実行し、相関処理により得られた相関値により信号強度検出部19がGPS微弱信号の信号強度20を算出する。
(もっと読む)
多衛星測位(ALLINVIEW)でのコヒーレントなグローバルポジショニングシステム(GPS)信号の擬似ランダムノイズ(PRN)コード捕捉およびナビゲーションソリューション(NavigationSolution)の算出のための方法およびシステム
本開示の方法およびシステムは、一度に1つのGPS信号捕捉ではなく、同時の、多衛星測位でのコヒーレントなPRNコード信号処理法に基づく、GPS衛星測距信号のより堅牢な検知を可能にする。さらに、当該方法およびシステムは、GPSのPRNコード信号を一度に1つ捕捉する従来の捕捉方策と比べると、組合された信号の信号対雑音比(SNR)捕捉性能において10dB以上の改善を可能にし得る。当該方法およびシステムはさらに、ユーザおよび基地局の両方に共通の測距誤差の除去を自動的に可能にし、マルチパス誤差がコード位相計測値に導入するのを最小限にする。  (もっと読む)
(もっと読む)
マルチパス抑制装置およびマルチパス抑制方法
【課題】マルチパスが重畳する環境における、電波の伝達時間に基づく測距の困難を抑制する。従来のマルチパス抑制方法は、予め直接波とマルチパス1波との計2波から構成されるモデルを仮定しているため、マルチパスが存在しない場合や、マルチパスが2波以上重畳する場合には、誤差が大きくなるという問題があった。
【解決手段】マルチパスが重畳するモデルを複数仮定し、それらモデルの信頼度を評価し、信頼度の高いモデルを選択し、選択したモデルに基づいて、直接波の伝達時間を得て、信号源と受信機との間の距離を得ることで、マルチパスを抑制する。
(もっと読む)
衛星航法受信機
【課題】第1の変調コードの相関処理結果に基づいて、第2の変調コードの相関処理効率を向上させ、且つ、第1の変調コードの相関ピークを誤検出した場合であっても、第2の変調コードの相関ピークを確実に行うことができる衛星航法受信機を提供する。
【解決手段】第1の相関処理部4で検出した第1の変調コード(L1C/Aコード)のコード位相を用いて第2の変調コード(L2CMコード)の相関ピークを検出する際に、探索範囲分割部7が第2の変調コード(L2CMコード)の全コード長を複数のセルに分割する。次に、L2探索位相算出部8が第1の相関処理部4で検出したコード位相から第2の変調コード(L2CMコード)のコード位相の探索候補点を算出する。探索順序決定部8は、コード位相の探索候補点に基づいて分割されたセルの探索順序を決定する。
(もっと読む)
汎用高性能ナビゲーションシステム
低地球軌道(LEO)衛星を使用し汎用高性能ナビゲーションシステムを提供する。ナビゲーションを遂行する方法は一実施形態において、LEO衛星からLEO信号を受信するステップと、LEO信号からナビゲーション信号を復号化するステップと、第1及び第2の測距発信源から第1及び第2の測距信号をそれぞれ受信するステップと、第1及び第2の測距発信源に関連する較正情報を割り出すステップと、ナビゲーション信号と、第1及び第2の測距信号と、較正情報とを用いて位置を計算するステップとを含む。別の実施形態において、LEO衛星からLEO信号を提供する方法は、複数の送信スロットにわたって複数の送信チャネルを提供するステップを含み、ここで送信チャネルは1セットの通信チャネルと1セットのナビゲーションチャネルとを備え、同方法はさらに、ナビゲーション信号に対応する第1の擬似ランダムノイズ(PRN)測距オーバーレイを生成するステップと、ナビゲーションチャネルの第1のセットへ第1のPRN測距オーバーレイを適用するステップと、通信チャネルとナビゲーションチャネルとをLEO信号にまとめるステップとを含む。方法はまた、LEO衛星からLEO信号をブロードキャストするステップを含む。低地球軌道(LEO)衛星データアップリンクも提供する。方法は、LEO衛星へデータアップリンク信号をブロードキャストするステップを含む。様々な局地的ナビゲーション信号妨害アプローチも提供する。或る操業エリアにわたって変調済みノイズ信号をブロードキャストすることにより、ナビゲーション信号に対応する複数の妨害バーストを提供する。妨害バーストは、当該操業エリアの中でナビゲーション信号を概ね遮るように構成する。 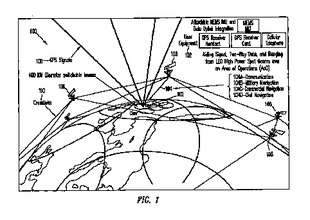 (もっと読む)
(もっと読む)
クライアントシステム、ネットワークシステム及び測位方法
【課題】 ノンプリアンブルフレーム同期
【解決手段】 ナビゲーション衛星受信機は、ネットワークでアクセス可能な基準局を利用してパターンマッチング用のナビゲーションデータサブフレームをネットワーククライアントで保持する。もしくは、バイトあたりの通信コストが高価な場合にはサーバがパターンマッチングを実行する。保持されたナビゲーションデータには30秒置きに軌道暦情報が、そして12.5分置きに完全な衛星暦情報が繰り返されている。これにより、クライアントは受信したデータがナビゲーションデータシーケンスの中のどこにあるか即時に認識することができるので、TLMワードのプリアンブルを待たなくていい。従って、初期定点化時間を高速にする際、貴重な数秒の節約になる。
(もっと読む)
マルチプルGPS測定タイプを加重最小二乗解へと融合するための方法
GPSベースの空中ナビゲーションシステムを用いて空中航空機に対する位置データを計算する方法であって、該GPSベースの空中ナビゲーションシステムで利用可能な複数の異なるタイプの測定データを加重最小二乗アルゴリズムに融合して、該複数の異なるタイプの測定データに対する適正な共分散行列を決定することにより、相対状態関数の位置成分を処理するステップを含む方法。 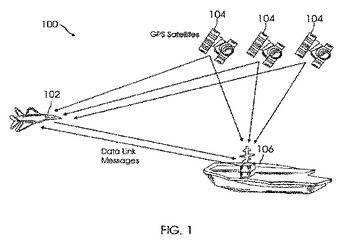 (もっと読む)
(もっと読む)
241 - 260 / 377
[ Back to top ]