
Fターム[5J062DD25]の内容
Fターム[5J062DD25]に分類される特許
41 - 60 / 233
測位装置、測位方法及びプログラム
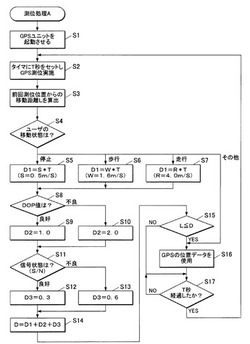
【課題】ユーザの現在位置の測位を行う測位装置において、ユーザの移動状態から有り得ない誤った測位結果が使用されることを防止する。
【解決手段】撮像装置1AのCPU10は、GPSユニット31における前回の測位結果と今回の測位結果に基づいて、ユーザの前回の測位位置からの移動距離Lを算出し、3軸加速度センサ16により検出されたユーザの移動状態に基づいて前回の測位位置からユーザが移動し得る距離の許容範囲を設定し、算出された移動距離Lが設定された許容範囲内である場合にGPSユニット31による測位結果を使用し、算出された移動距離Lが設定された許容範囲内ではない場合にGPSユニット31による測位結果を使用しないように制御する。
(もっと読む)
方位角推定装置、方法及びプログラム

【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
GPSレシーバ及びナビゲーションシステム
【課題】GPS測位演算において測位が中断された直後の測位精度を高めること。
【解決手段】カルマンフィルタを用いたGPS測位演算を所定の周期で行うことにより自車の推定位置を算出し、デッドレコニング用のセンサの出力に基づいて自車の移動位置を算出する測位演算部を備える車載用のGPSレシーバであって、測位演算部は、非測位状態において推定位置と移動位置との距離が所定の距離よりも大きいと判定した場合に、該カルマンフィルタのフィルタリセットを実行することを特徴とするGPSレシーバ及び該GPSレシーバを備えるナビゲーションシステムを提供する。
(もっと読む)
GPS測位システム、GPS測位方法、およびGPS測位端末
【課題】高精度で且つ効率良く更に高速でGPS測位を行うことが可能なGPS測位システム、GPS測位方法、およびGPS測位端末を提供する。
【解決手段】GPS測位用のアシストデータを格納する格納部36と、格納部36に格納された格納アシストデータが有効か無効かを判断する判断部35と、格納アシストデータが有効と判断された場合に、基地局10と通信せず当該有効判断された格納アシストデータを元に、GPS測位を行うAutonomous測位部33と、格納アシストデータが無効と判断された場合に、基地局10との通信により取得されたアシストデータを元に、GPS測位を行うA-GPS測位部32と、GPS測位が成功した場合に、当該測位結果を元に、格納アシストデータを更新し、且つGPS測位が失敗した場合に、基地局10との通信により取得されたアシストデータを元に、格納アシストデータを更新する更新部37と、を備える。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 開始地点の位置情報を取得していなくても、自律航法機能により移動中の各地点の位置情報を求めることのできる測位装置、測位方法およびプログラムを提供することにある。
【解決手段】 相対的な位置変動の計測を行う自律航法用センサを備えた測位装置、その測位方法および測位用のプログラムである。そして、移動経路T1に沿った移動中に自律航法用センサによる位置変動の計測を継続させるとともに、移動経路T1の終端地点Bで位置情報が与えられた場合に、この終端地点Bの位置情報から自律航法用センサにより継続的に計測されてきた位置変動の情報を逆算的に減算していくことで、終端地点Bから開始地点Aまでの各地点の位置情報を算出する。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
軌道ベースのロケーション決定
ここで開示する主題事項は、移動体デバイスの動きの推定された軌道を使用して、特に、推定された軌道と、1つ以上の予め定められた候補の軌道との比較を使用して、移動体デバイスのロケーションを決定することに関する。 (もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
後処理を用いるリアルタイム・データ(Real−TimeDataWithPost−Processing)
本明細書で開示される主題は、航法解を求める及び/又は予測することに関係する。 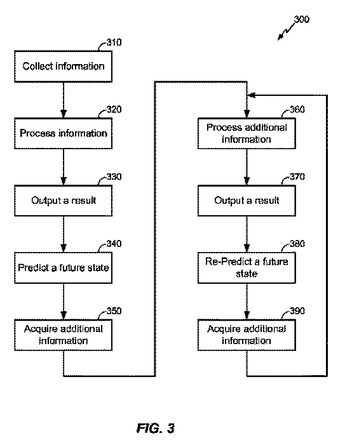 (もっと読む)
(もっと読む)
行動推定装置、行動推定方法、及び行動推定プログラム
【課題】位置情報の精度を低下させることなく携帯端末のバッテリー消費を抑える。
【解決手段】第1の時間間隔で測定される位置情報を前記第1の時間間隔より長い時間間隔である第2の時間間隔で一括して取得するデータ通信装置105と、データ通信装置105により取得された位置情報を蓄積する位置情報蓄積部106と、位置情報蓄積部106に蓄積された一定期間の位置情報を解析することにより速度ベクトルを生成する速度ベクトル生成部107と、速度ベクトル生成部107により生成された速度ベクトル付きの地図を蓄積する地図蓄積部108と、データ通信装置105により取得された最新の位置情報と地図蓄積部108に蓄積された地図とに基づいて、次にデータ通信装置105により位置情報が取得されるまでの間の位置を前記第2の時間間隔よりも短い時間間隔で推定する推定部109とを備える。
(もっと読む)
移動端末装置
【課題】アシスト測位を利用して自己位置を検出する場合に、自己位置を誤認識することを防止する移動端末装置を提供する。
【解決手段】移動端末装置20は、追跡センター100からの問い合わせにより位置検出処理を起動し(S402、S404)、自己位置を検出するためのネットワークアシストを通信ネットワーク30に要求する(S406)。通信ネットワーク30からアシスト情報を受信すると(S408)、アシスト情報に基づいてGPS信号を受信し(S410)、受信したGPS信号を通信ネットワークに送信する(S412)。GPS信号に基づいて演算した位置座標を測位位置として通信ネットワーク20の測位サーバから受信すると(S414)、移動端末装置20は、S400で取得した基地局の位置座標と測位サーバから取得した測位位置とを比較し(S416)、適切な位置を自己位置として追跡センター100に通知する(S418、S420)。
(もっと読む)
状態推定装置、方法、プログラム及びその記録媒体
【課題】未知の外乱がある環境で、対象物の位置等の状態(位置)の推定を高精度で行う。
【解決手段】状態パーティクルを用いて状態の推定を行うモンテカルロ・ローカリゼーション法を応用して、さらに変位量パーティクルを用いる。変位量パーティクルを用いることにより、対象物に与えられる外乱を考慮して対象物の変位量を推定することが可能となり、対象物の状態の推定を高精度に行うことができる。また、誘拐度Eを定義して、誘拐度Eが低い場合には、移動誤差を拡大することで状態パーティクルの存在範囲を広げる処理を行う。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性を向上させることのできる観測誤差の新たな設定方法を提案すること。
【解決手段】GPS衛星から受信したGPS衛星信号の受信周波数及びコード位相をメジャメントとし、このメジャメントを観測値として用いて、カルマンフィルターの理論に基づく位置算出処理を行って位置を算出する。位置算出処理では、最新のメジャメント観測値と最新のメジャメント予測値との差で表される最新観測予測差値(第1のメジャメントパラメーターの値)を算出し、算出した最新観測予測差値を用いて、カルマンフィルターの補正処理に使用する観測誤差行列「R」を設定する。
(もっと読む)
受信機
【課題】受信装置を搭載した移動体が走行している道路情報を取得し、取得した道路の軌道と受信信号から得られる情報とを用いて測位し、取得する道路情報を限定した受信装置を提供することにある。
【解決手段】移動体に備え付けられる受信装置であって、衛星信号受信手段が衛星から衛星信号を受信し、信号処理手段が前記衛星信号から衛星位置情報と、誤差を含んだ前記衛星から前記受信装置までの距離である擬似距離情報とを算出し、道路情報取得手段が、限定された道路に関する3次元の道路情報を取得し、測位計算手段が前記道路情報に基づいた軌道、前記衛星位置情報、及び前記擬似距離情報に基づいて前記受信機の位置情報を算出する。
(もっと読む)
端末位置検出システム及び船員位置管理システム
【課題】無線LANによって端末位置を検出する端末位置検出システムにおいて、様々な原因で生じる検出位置精度の低下を抑制する。
【解決手段】端末位置検出システム1が備える複数の中継機3は、検出対象者100が携帯する無線LAN端末装置2から送信される無線フレームを受信し、その受信状態に関する受信状態情報を作成する。位置演算装置4は、中継機3から取得した受信状態情報に基づいて、それぞれの無線LAN端末装置2の位置を演算により推定し、表示装置5に表示させる。ただし、推定された現在の無線LAN端末装置2の位置が、当該無線LAN端末装置2の過去の位置を含む所定範囲から外れていた場合は、推定された現在の無線LAN端末装置2の位置は誤りと判定され、表示装置5に表示されない。
(もっと読む)
フィンガープリント法を用いた位置検出システム及び位置検出方法
フィンガープリンティング法による位置検出システム及び方法であって:複数のフィールドデバイスと一つのターゲットデバイスとに関連する領域の中の複数のノードを定義する段階と;前記複数のノードにおける前記フィールドデバイスからの予測信号強度を決定する段階であって、特定のノードにおけるそれぞれの予測信号強度は、前記フィールドデバイスの一つと関連する、段階と;前記ターゲットデバイスと通信する前記フィールドデバイスのそれぞれのための、前記ターゲットデバイスにおける前記フィールドデバイスからの実信号強度を測定する段階であって、それぞれの実信号強度は前記フィールドデバイスの一つと関連する、段階と;特定のフィールドデバイスの実信号強度より大きいか又は等しい、特定のフィールドデバイスの予測信号強度を有する前記ノードを有効なノードとして指定する段階と;前記有効なノードのうち、前記フィールドデバイスの実信号強度が、前記フィールドデバイスの予測信号強度と一致する、少なくとも一つの有効なノードを決定する段階と;を有する。  (もっと読む)
(もっと読む)
位置検出装置およびプログラム
【課題】GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出する位置検出装置を実現する。
【解決手段】本装置を携行したユーザが乗車する電車が発車すると、発車時刻と乗車駅名とに基づき時刻表経路検索データベース110を参照して乗車中の電車の路線名を検索すると共に、検索された路線における乗車駅以降の各停車駅毎の駅間距離を取得する。そして、走行中に計測される加速度データに基づきユーザが乗車する電車の移動距離(駅からの移動距離)を算出して地図表示し、発車した電車が駅に停車する毎に、発車駅から停車駅までの距離を時刻表経路検索データベース110から得られる駅間距離に書き換えて位置検出の誤差を補正する。この結果、GPS測位不能な電車乗車時でも現在走行している場所がどの駅とどの駅の間に位置しているのかを検出できる。
(もっと読む)
ナビゲーション装置及びナビゲーション用プログラム
【課題】より誤マッチングを少なくすると共に、誤マッチングから早期に回復する。
【解決手段】推測航法により求めた推測位置P1に対し、推測方位の信頼度とGPS方位の信頼度の高い方の信頼度に基づく想定方位誤差を求め、信頼度が高い方の方位と、最適候補地点に推測位置P1を補正した場合の進行方向の方位との方位差θが想定方位誤差の範囲内にない場合には推測位置P1を補正しない。推測軌跡方位の信頼度は、前回の信頼度、想定累積方位誤差、ジャイロ左右感度学習状態から、GPS方位の信頼度は、推測方位一致度、GPS速度、DOPから決定する。これにより、画面表示では最適候補地点に車両マークを移動させることで誤マッチングであっても、実際の推測位置P1は補正させず、未補正の推測位置P1を基準に次の推測位置P2を求めるので、次回以降のマッチング処理で、より早く正しい道路に車両マーク及び推測位置を復帰させることができる。
(もっと読む)
位置推定装置、無線端末、位置推定システム
【課題】少ない演算量でターゲット端末の位置を推定することのできる位置推定装置を得る。
【解決手段】無線端末100の位置を推定するための基準となるアンカー端末200が存在する環境下における無線端末100の位置を推定する装置であって、無線端末100とアンカー端末200の間の端末間距離に応じて変化する状態値を表す情報を受信する受信部と、受信部が受信した情報に基づき無線端末100の位置を推定する位置推定部450と、を備え、位置推定部450は、状態値が特定の値であると仮定した場合における端末間距離の確率密度関数p(r|P)を算出し、確率密度関数p(r|P)の確率値が最大となる端末間距離を特定し、その端末間距離を用いて無線端末100の位置を推定する。
(もっと読む)
41 - 60 / 233
[ Back to top ]