
Fターム[5J062DD25]の内容
Fターム[5J062DD25]に分類される特許
161 - 180 / 233
車両位置予測方法及び装置
【課題】GPS三次元測位が不能になった後三次元測位が再開されたとき、その間の勾配が大きくても正確な車両位置の選択が可能な車両位置予測方法及び装置とする。
【解決手段】GPSで三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、走行履歴と車速データにより現在の車両位置から移動する可能性のある予測移動範囲を演算し、GPSによる三次元測位が行われないとき、二次元測位、或いはジャイロと車速信号により車両位置を予測する。GPS測位車両位置が前回演算した予測移動範囲に存在するときには、通常その車両位置を採用し、存在しないときには前記予測した車両位置を採用する。しかし、三次元測位から二次元測位等に切り替わり再度三次元測位を行うとき、その間の距離が所定以上で勾配が所定以上の時には、三次元測位再開時の測位地点が予測移動範囲に存在しないときでも三次元測位位置を選択し、以前の走行履歴を削除する。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体

【課題】静止時における出力位置の精度を向上させることができる測位装置等を提供すること。
【解決手段】衛星信号S1等に基づいて、測位装置20の測位位置を算出する測位位置算出手段と、測位装置20の移動速度を算出する速度算出手段と、前回測位時からの経過時間が予め規定した許容時間範囲内であり、かつ、前回測位時の移動速度v0が予め規定した第1速度許容範囲内であり、かつ、現在の移動速度v1が予め規定した第2速度許容範囲内であるという静止状態条件βを満たすか否かを判断する静止状態判断手段と、前回測位時の測位位置P0と現在の測位位置P1とを平均化処理して平均位置Q1を算出する平均位置算出手段等を有する。
(もっと読む)
車載器
【課題】測位誤差を良好に除去して精度の高いGPS測位結果を安定的に取得する。
【解決手段】所定の基準値に対する車両の高度方向の変位量を推定する高度変位推定手段と、推定される変位量の絶対値が所定の閾値よりも大きいか否かを判定する変位量判定手段とを備え、該変位量が該閾値よりも大きいと判定され且つGPSにより少なくとも高度の測位が成されたとき、カルマンフィルタの機能をリセットする車載器を提供する。
(もっと読む)
緊急通報端末
【課題】緊急情報端末において、衛星測位システムを利用して位置情報を得ることができず、且つ無線基地局の設置位置が不明であっても、現在の概略位置を精度良く得ることを可能にする。
【解決手段】端末1は、CPU2aとRAM2bとを有する端末制御部2と、GPSにより端末位置を測位するGPS測位装置3と、無線基地局と通信する無線通信部4とを備えている。端末制御部2は、端末1が保持者により操作されて、測位装置3が位置情報を得たときに、そのとき無線通信部4が通信を行っている基地局の基地局IDコードと得られたGPS測位データとを対応付けてデータベース化し、RAM2bに記憶保持する。端末制御部2は、端末1が操作されたときに、測位装置3が位置情報を得ることができない場合には、このデータベースに記憶保持されているGPS測位データを現在の端末1のGPS測位データとして代用することが可能になる。
(もっと読む)
測位システム、測位方法及びカーナビゲーションシステム
【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
(もっと読む)
位置算出装置の誤差円の決定方法
【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
インターネットベースのアシスト全地球測位システム
少なくとも1つのデバイス22を位置決定するための構成20は、インターネット通信に基づいたアシスト全地球測位システム技術を利用する。開示された例では、ネットワークサーバ26が、インターネット24上にあるデバイス22の存在を検出する。ネットワークサーバ26は、デバイス22に関するインターネット情報に基づいたデバイス位置の初期推定を行う。初期推定は、ロケーションサーバにより使用されて、デバイス22に提供されるアシスト全地球測位システム通信を生成する。デバイス22に付随するアシスト全地球測位システム受信機72は、受信された通信を使用して全地球測位システム32と相互作用する。次いでこの相互作用の表示は、実際のデバイス位置決定を行うためにネットワークサーバ26またはロケーションサーバ28によって使用されることが可能である。 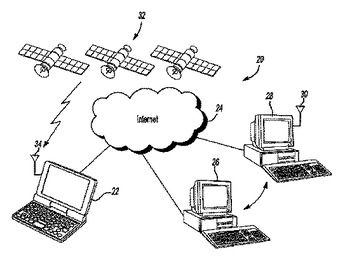 (もっと読む)
(もっと読む)
位置推定システム
【課題】広範囲でターゲット端末の位置推定を行う場合に、リファレンス端末と位置推定サーバ間の通信効率の良い位置推定システムを得る。
【解決手段】端末の推定位置の情報を受信し、推定位置の情報を含めた位置推定要求信号を無線で送信するターゲット端末10と、所定の位置に複数配置され、受信した位置推定要求信号の受信電力値を測定し、複数配置された位置推定サーバ30のうちの何れかを選定し、選定した位置推定サーバ30に受信電力値の情報を送信するリファレンス端末20と、複数配置され、複数のリファレンス端末20で測定された受信電力値の情報を受信し、受信した受信電力値の情報に基づき、ターゲット端末10の推定位置を求め、推定位置の情報を当該ターゲット端末10に送信する位置推定サーバ30とを備えたものである。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
迷子捜索システム、探索端末装置、探索端末装置の制御方法、探索端末装置の制御プログラム及び探索端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】高層ビル内において、迷子を効率的に探索することができる迷子捜索システム等を提供すること。
【解決手段】被探索端末装置20は、測位電波を使用して測位位置を3次元で示す測位位置情報を生成する測位位置情報生成手段を有し、探索端末装置40は、被探索端末装置から、測位位置情報156を受信する測位位置情報受信手段と、測位位置情報に含まれる経度情報及び緯度情報を使用して、測位位置を2次元表示する2次元表示手段と、予め規定した規定時間において、経度情報及び緯度情報に変化があるか否かを判断する2次元情報評価手段と、2次元情報評価手段が、経度情報及び緯度情報に変化がないと判断した場合には、経度情報、緯度情報及び測位位置情報に含まれる高度情報を使用して、測位位置を3次元表示する3次元表示手段と、を有する。
(もっと読む)
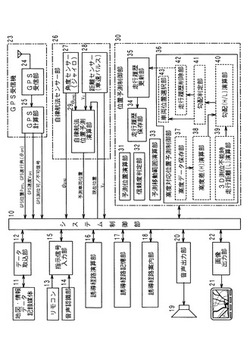
測位端末
【課題】測位端末において、測位結果の表示にかかる時間や通信コストを削減し、異なる測位方式であっても単一の端末で測位可能とする。
【解決手段】測位端末1は、自律測位部11、無線測位部12、推測航法部13、位置補正部14、測位演算部15、位置情報表示部16および測位ソフトウェア記憶部18を備える。自律測位部11が測位端末1の所持者の歩行動作に応じて慣性データを出力し、推測航法部13がその慣性データから位置情報を推定する。一方、無線測位部12および測位演算部15は、測位ソフトウェア記憶部18からロードされた測位ソフトウェアをCPUが実行することによって動作し、無線信号の周波数、変調方式、測位方式に応じて無線信号の受信、復調、測位演算などを行う。位置補正部14は、推測航法部13および測位演算部15から入力した位置などから位置情報を補正する。そして、位置情報表示部16が、位置情報を表示する。
(もっと読む)
車両位置推定装置及び車両位置推定方法
【目的】GPS受信データより得られるGPS位置及びGPS速度を用いて、GPS受信情況が悪くなっても車両位置を正しく推定して表示する「車両位置推定装置及び車両位置推定方法」を提供することである。
【構成】GPS衛星より受信したGPS受信信号より算出されるGPS位置に基づいて車両位置を推定する車両位置推定装置において、(1)車両の進行方向履歴を進行方向履歴保存部に保存し、(2)GPS位置とGPS速度とGPS進行方向とから次の位置測定時刻における車両位置と車両が存在する可能性のある位置範囲を予測し、(3)GPS位置が前記予測位置範囲内に存在すれば該GPS位置を現在位置とみなし、(4)予測位置範囲内に存在しなければ、予測位置を現在位置とみなすと共に、該現在位置とGPS速度と保存されている車両進行方向とから次の車両位置と車両位置範囲を予測する。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を得ることができる補正係数演算装置を得る。
【解決手段】新たな前記GPS情報を取得する度に、当該取得した現在のGPS情報と、それに対して近い側から順に過去のGPS情報を選択し、選択数が所定数に到達するまで、当該現在のGPS情報に対して更に過去のGPS情報の選択を繰返し、途中に、距離補正係数の演算に不適当と考えられるGPS情報が存在する場合は、学習を終了する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】人や物の移動により電波強度の変化が生じる環境において、事前の電波強度の学習をすることなく、人や物の正確な位置推定を可能とする位置推定装置及び位置推定方法を提供する。
【解決手段】位置推定装置30は、電波受信端末IDと、電波受信端末によって受信された電波の電波強度とを関連づけて格納する電波強度格納部32と、電波受信端末IDと電波受信端末の存在するエリアとを関連づけて格納する端末属性情報格納部33と、位置推定対象端末の電波強度と、電波強度格納部32及び端末属性情報格納部33に格納された、参照端末の電波強度との近接性に基づいて、位置推定対象端末の存在エリアを決定する存在エリア決定部36とを備える。
(もっと読む)
ナビゲーション装置
【課題】車両の現在位置が正しい道路上に表示されるようにすることにある。
【解決手段】現在位置測定部12がデッドレコニング処理によって算出した車両の現在位置および進行方位が採用し続けられる地域(例えば立体駐車場)に車両が進入した場合、マップマッチ候補道路検出部17は、前記移動体が該地域から脱出した場合に走行する可能性の高い道路の道路情報をマップマッチ候補道路18に登録する。移動体が該地域から脱出した後、信頼度決定部13から出力される現在位置および進行方位のデータを選択部14が選択する前に、マップマッチ処理を行う際には、マップマッチ候補道路18に登録されている道路情報を用いる。
(もっと読む)
位置評定装置、位置評定方法および位置評定プログラム
【課題】 都市部などGPSの衛星補足数が十分確保できない条件下でも測位精度の劣化を防ぐことを目的とする。
【解決手段】 天空画像カメラ部110が撮影して撮像データを生成し、天空画像変換部120が撮像データを仰角・方位角面に投影する。また、DSM取得部140が各地点において天空画像カメラ部110が撮影するであろう範囲の地理データをDSMデータベース190から取得し、DSM変換部150が地理データを仰角・方位角面に投影する。そして、位置・姿勢推定部160が仰角・方位角面に投影した撮像データと各地点における地理データとを比較し、地理データが撮像データと一致する地点を天空画像カメラ部110の撮影時の位置評定装置100の位置とする。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 精度の高い擬似距離を選択して測位計算できるようにする。
【解決手段】 測位装置10は、GPS受信機2と赤外線カメラ7と画像処理機8と慣性装置4と観測データフィルタ5と航法計算装置6とを備えて測位計算を行う。観測データフィルタ5は、GPS受信機2から各衛星に対する擬似距離と衛星位置とを入力し、さらに、画像処理機8から赤外線カメラ7で撮像した全周囲の建物を仰角・方位角で表した撮像データを取得する。次に、自己位置と衛星位置と建物との位置関係に基づいて各衛星からの測位信号が直接波か反射波か判定する。そして、直接波である測位信号から求めた擬似距離を測位計算に使用する擬似距離として出力する。また、反射波に対して測位計算における重みを設定して出力する。航法計算装置6は、観測データフィルタ5が出力した擬似距離および擬似距離の重みに基づいて測位計算を行う。
(もっと読む)
GPS位置決定を判定する方法およびそのGPSレシーバ
GPS位置決定を判定する方法が提供され、方法は、(i)受信したGPS信号をサンプリングし、これらサンプルを記憶するステップと、(ii)これらGPS信号サンプルの予備処理を行い、後のこれらGPS信号サンプルの最終的な処理の間に、位置決定を得ることができる可能性を判定するステップと、(iii)ステップ(ii)の後に、これらGPS信号サンプルの最終的な処理を行い、位置決定を得るステップと、を備える。  (もっと読む)
(もっと読む)
位置推定システム
【課題】 ターゲット端末から発信された無線の受信電力からターゲット端末利用者の位置を精度良く推定する位置推定システムを提供する。
【解決手段】 位置推定の要求を無線で発信するターゲット端末10と、所定の位置に配置され、ターゲット端末10から発信された無線の受信電力値を測定する複数のリファレンス端末20と、リファレンス端末20毎に測定された受信電力値からターゲット端末10と各リファレンス端末20との間のそれぞれの距離を判別し、かつ、判別した各距離を基にターゲット端末10の位置を推定する位置推定サーバ30とを備えた位置推定システムにおいて、複数のリファレンス端末20は、測定した受信電力値を位置推定に利用するかどうかを無線の受信信号の信頼性を表す指標を基に判定する。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法および装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法およびカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
161 - 180 / 233
[ Back to top ]