
Fターム[5J062DD25]の内容
Fターム[5J062DD25]に分類される特許
61 - 80 / 233
衛星軌道データの圧縮方法、衛星軌道データの提供方法、衛星軌道データの展開方法及びデータ圧縮装置
【課題】位置算出装置に提供する衛星軌道データのデータ量を削減するための新たな手法を提案すること。
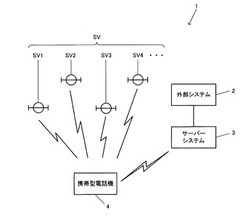
【解決手段】位置算出システム1において、サーバーシステム3は、外部システム2から取得した衛星予測暦を用いて、長期間有効なエフェメリスである長期予測エフェメリスを生成する。この際、サーバーシステム3は、衛星軌道モデル式のパラメーター、時計誤差モデル式のパラメーター、衛星軌道の信頼性を示すパラメーターのそれぞれについて、当該パラメーター値の時間変化に基づいて圧縮方法を決定する。そして、決定した圧縮方法に従って、各パラメーターのパラメーター値を表すビット列を削減して圧縮パラメーター値を算出し、各パラメーター値の圧縮方法の識別情報とともに、圧縮長期予測エフェメリスとして携帯型電話機4に提供する。
(もっと読む)
位置表示装置および現在位置決定方法

【課題】 装置の周辺の状態に関わらず位置を正確に検出すること。
【解決手段】 携帯型ナビゲーション装置は、GPS無線信号を受信するGPS信号受信部(S01)と、GPS信号に基づいて第1現在位置を決定する第1現在位置決定部(S02)と、移動方位を検出する方位検出部(S09)と、移動距離を検出する移動距離検出部(S10)と、基準位置と移動方位と移動距離とに基づいて、第2現在位置を決定する第2現在位置決定部(S11)と、装置周辺の状態を検出する状態検出部(S16)と、検出された状態と第1現在位置に基づいて(S17でNO)、基準位置を設定する基準設定部(S18)と、を備える。
(もっと読む)
無線位置決定のための配備後較正
方法および装置は誤設定された無線アクセスポイントの較正に関する。1つの方法は、移動局の位置と、移動局と複数の無線アクセスポイントとの間で交換されたパケットから導出された無線信号モデル測定値とを受信するステップと、移動局の位置の決定において使用される複数の無線アクセスポイントの位置および/または識別情報を受信するステップと、移動局の位置を無線信号モデル測定値と比較するステップと、比較するステップに基づいて誤設定された無線アクセスポイントを識別するステップとを含みうる。もう1つの方法は、複数の無線アクセスポイントに関する位置を受信するステップと、無線信号モデルに基づいて移動局の位置を決定するステップと、移動局の位置と、複数の無線アクセスポイントに関する位置を伴う無線信号モデルとを比較するステップと、少なくとも1つの無線アクセスポイントが誤設定されているか否かを決定するステップとを含みうる。  (もっと読む)
(もっと読む)
測位のためのDGNSS補正
差分補正を用いた測位をサポートするための技法について説明する。一態様では、衛星についての差分補正は、(1)衛星についての擬似距離補正の不確実性を示すユーザ差分距離誤差(UDRE)と、(2)UDREについてのスケーリングファクタとすることができるUDRE成長率と、(3)スケーリングファクタを適用するために使用される時間単位とすることができるUDRE成長率の有効期限とを含むことができる。1つの設計では、端末は、差分補正情報を求める要求メッセージを送信することができ、応答メッセージを受信することができる。端末は、応答メッセージから、少なくとも1つの衛星の各々についての差分補正(たとえば、UDRE、UDRE成長率、およびUDRE成長率の有効期限)を取得することができる。端末は、各衛星についての差分補正に基づいてそれ自体についてのロケーション推定値を導出することができる。 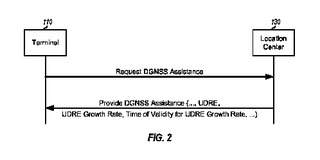 (もっと読む)
(もっと読む)
無線端末における位置推定方法、無線端末及び位置推定プログラム
【課題】測位電波を受信することができない環境にあっても、無線端末が相互に通信することで位置情報を推定すると共に、その位置情報の精度を高めることができる無線端末の位置推定方法、無線端末及び位置推定プログラムを提供する。
【解決手段】複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、無線端末は、自無線端末の位置情報と位置情報の精度を高い順に規定したレベルとを保持し、通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から他無線端末までの推定距離を算出し、その推定距離に基づいて推定位置情報を算出する第3のステップとを有する。
(もっと読む)
長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの位置を時系列に予測した衛星予測暦に含まれる各予測位置を、測位用衛星の実際の位置を時系列に記憶した衛星精密暦に含まれる実績位置と比較することで、衛星予測暦に含まれる予測位置の正確性の変化を分析する。そして、連続する複数の予測対象期間それぞれにおける予測衛星軌道の衛星軌道パラメータの値を纏めてなる長期予測エフェメリスの予測対象期間それぞれの信頼性を、分析の結果に基づいて判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
(もっと読む)
長期予測軌道データの信頼性判定方法、長期予測軌道データの提供方法及び情報提供装置
【課題】長期予測エフェメリスの信頼性を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から受信したGPS衛星SVの予測位置のデータである衛星予測暦と、予測位置に対応するGPS衛星SVの実績位置のデータである衛星精密暦とを用いて、少なくとも1日以上の生成対象期間における衛星軌道を予測した長期予測エフェメリスの信頼性を判定する。そして、信頼性の判定結果を長期予測エフェメリスに含めて、携帯型電話機4に提供する。
(もっと読む)
GNSS暦の自律的な受信機内予測方法及び装置
全地球航法衛星システム(GNSS)の軌道状態及びクロック状態の自律的な受信機内予測の方法及び装置を記載する。GNSS放送メッセージのみを使用し、周期的な外部通信情報を必要としない。地球方位情報をGNSS放送暦から抽出する。地球方位パラメータの正確な推定により、慣性基準フレーム内で、最適に適合するGNSS軌道を、時間内に前向きに伝播させることができる。次に、推定した地球方位パラメータを用いて、予測した軌道を地球中心−地球固定(ECEF)座標に変換して、信号の取得に当たりGNSS受信機を支援するために使用する。GNSS衛星のクロック状態も放送暦から抽出して、このデータに、パラメータ化したクロック動作のモデルを適合させる。次に、モデル化したクロックを推定し、時間的に前向きに伝播させて、予測した軌道と共に、より迅速なGNSS信号取得を可能にする。 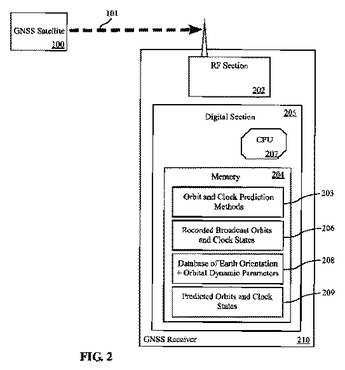 (もっと読む)
(もっと読む)
携帯端末装置の方位を推定するための装置および方法
携帯端末装置の現在の方位(o(i))を現在の地理的位置と推定するための装置(60)であって、そこにおいて、現在の地理的位置で、現在の測定時間(i)に携帯端末装置の現在の方位(o(i))を有する現在の地理的位置で受信されうる無線送信機(22)の送信機識別および電磁信号特性を含む現在の測定パッケージ(MP(i))が決定されうり、装置は、現在の測定パッケージ(MP(i))と現在の測定時間の前に存在する基準時間に基準方位を有する基準測定パッケージに割り当てられる地理的基準位置で受信できた基準無線送信機の送信機識別、基準方位(ok)および電磁信号特性を含む基準測定パッケージ(RPk)との間の一致測定(acck)を決定するための手段(62)、一致測定(accn)を含む少なくとも1つの基準測定パッケージ(RPn)を選択するための手段(64)、および少なくとも1つの選択された基準測定パッケージ(RPn)の基準方位(on)に基づいて携帯端末装置の現在の方位のための推定(o´(i))を決定するための手段(66)を有する。 (もっと読む)
測位装置
【課題】高精度GPS受信機において自装置位置を測位演算する場合に、擬似距離1msec.以下の項だけで自装置位置を正確に求めることができる測位装置を実現する。
【解決手段】測位装置10の初期値算出部141は、ドップラー周波数を用いて、自装置位置を未知数とする航法方程式をたて、それを最小自乗法で解く。そして、初期値算出部141は、その解を真位置推定部142に与える。測位装置10の真位置推定部142は、この初期値を用いて擬似距離の1msec.以下の項による観測方程式を設定し、当該観測方程式から測位装置10の高精度な位置を推定演算する。
(もっと読む)
位置情報取得システム、位置情報取得方法、移動体通信端末、及び、プログラム
【課題】位置情報の取得の際の、移動体通信端末の省電力化を図る。
【解決手段】基地局と、前記基地局を介して移動体通信を行う複数の移動体通信端末と、を含む位置情報取得システムを構成した。そして、移動体通信端末は、基地局から受信した測位タイミング情報に基づく時刻に、GPS衛星を利用したGPS測位を行い自身の自己位置情報を現在位置情報として記憶するようにした。また、移動体通信端末は、自身の近傍に存在する他の移動体通信端末から当該他の移動体通信端末の有する位置情報を他者位置情報として受信するようにした。さらに、移動体通信端末は、前記現在位置情報と前記他者位置情報から信頼度のより高いものを選択して当該時点における自身の現在位置情報とする、ようにした。
(もっと読む)
パラメータ値算出方法、長期予測軌道データの提供方法、情報提供装置及び測位システム
【課題】長期予測エフェメリスを生成するための新たな手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、衛星軌道の所定の有効期間を区分する予測対象期間の長さを、将来になるほど長くなるように可変に設定する。より具体的には、外部システム2から取得した衛星精密暦に含まれる過去の予測位置に対応するGPS衛星SVの実績位置と、外部システム2から取得した衛星予測暦に含まれる過去の予測位置との差で表される予測誤差が大きいほど、予測対象期間の長さを長く設定する。そして、設定した複数の予測対象期間それぞれについて、衛星予測暦に基づいて、ケプラーの楕円軌道モデルに従ったGPS衛星SVの予測軌道を求め、衛星軌道パラメータの値を算出する。そして、算出した衛星軌道パラメータの値を予測対象期間毎に纏めた長期予測エフェメリスデータを生成して、携帯型電話機4に提供する。
(もっと読む)
衛星軌道モデル化適否判定方法、長期予測軌道データ提供方法及び衛星軌道モデル化適否判定装置
【課題】衛星軌道のモデル化の適否を判定するための手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、外部システム2から取得したGPS衛星SVの予測位置を時系列に含んだ衛星予測暦に基づいて、GPS衛星SVの衛星軌道を近似するための近似モデルに従って予測軌道を求め、その衛星軌道パラメータの値を算出する。そして、算出した衛星軌道パラメータの値を用いて、GPS衛星SVの将来位置である予測軌道サンプリング位置(算出位置)を算出し、予測位置と予測軌道サンプリング位置間の距離に基づいて、衛星軌道のモデル化の適否を判定する。
(もっと読む)
測位システム
【課題】新たな無線機を別途設けることなく電波伝搬環境に対応した補正を行い、測位精度を向上する。
【解決手段】社員P1〜4に関連づけられ移動局10A〜Dと、複数の基地局12A〜Dと、移動局10の測位処理を行う測位サーバ14とを有する。測位サーバ14は、測位処理による移動局10A〜Dの位置データの時間的蓄積に応じて、測位処理結果を補正するための補正値を算出し、その補正値の算出後、当該補正値に基づき、新たに測位された移動局10A〜Dの位置データの補正を行う。
(もっと読む)
位置推定方法、サーバ、測位端末及び測位システム
【課題】測位端末の位置をより正確に求めるための新たな手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、GPS測位位置と当該GPS測位位置において通信可能な各基地局BSそれぞれの基地局信号の信号強度とを対応付けた端末データを蓄積記憶した端末データベースを有している。そして、携帯型電話機2の実在位置において通信可能な各基地局BSそれぞれの基地局信号の信号強度を当該携帯型電話機2から受信し、端末データベースの中から、携帯型電話機2から受信した基地局信号の信号強度に適合する信号強度を選出することで端末データを抽出する。そして、抽出した端末データに記憶されているGPS測位位置を用いて携帯型電話機2の位置座標を推定して、携帯型電話機2に送信する。
(もっと読む)
現在位置推定装置、方法及びシステム
【課題】登山等において、GPSシステムによる衛星からの電波を受信できない場合があっても、それまでの位置情報に基づいて現在位置を推定することができる装置を提供すること。
【解決手段】現在位置推定装置10は、地図情報DB33と気圧高度換算DB32とを有し、GPSシステムから受信したデータに基づく位置データと、気圧計91から取得した気圧データと、を対応付けて時系列に測定ログDB31に記録する。そして、測定ログDB31にそれまでに記録した気圧データと、新たに取得した気圧データと、に基づいて気圧高度換算DB32を参照して現在の高度を推定し、推定した当該高度と、測定ログDB31にそれまでに記録した位置データと、地図情報DB33に記憶した地形データと、に基づいて現在位置を推定する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
補正値予測式推定方法、位置特定用補正値の算出方法、補正値予測式推定プログラムおよび位置特定用補正値算出プログラム
【課題】膨大な補正値を用いる必要なく高精度に位置特定できるようにする。
【解決手段】移動局は、単独で測位し(S1)、基準局に概略位置を送信する(S2)。基準局は、最も近い基準局を選択し補正値予測式を選択し(S3)、予測式の係数または補正値予測式を送信し、移動局は、送信された予測式の係数または補正値予測式を用いて測位計算する(S6)。
(もっと読む)
RTK異常測位データ処理を伴うGPSによる変位計測装置および変位計測方法
【課題】RTK法による計測データに異常値が発生した場合でも、その異常値を除去し得るGPSによる海面の変位計測装置を提供する。
【解決手段】基準局1と観測局2からの計測データによりRTK演算部11にて演算された海面位置データをデータ選択部15を介してデータ解析部17に入力し、波浪・潮位・津波を抽出する装置であって、観測局からの計測データにより単独測位方式に基づき変動成分を得る高精度変動検出法を用いて波浪成分を求めるPVD演算部12と、過去のデータに基づき決定された潮位予測式を用いて予測潮位を得る潮位予測部13と、上記海面位置データから波浪成分を減算し且つこの減算値に基づき海面位置データに異常が発生しているか否かを判断する異常判断部16とを具備し、異常があると判断した場合に、実測された海面位置データの代わりに、潮位予測部で予測された異常のない予測潮位をデータ選択部に入力するようにしたもの。
(もっと読む)
低電力センサを使用するGPS省電力
位置ロケーションシステム、装置及び方法が開示される。無線装置は、衛星測位システム(SPS)受信機及び位置ロケーションプロセッサを含む。SPS受信機は、測位信号の有効性を検出し、位置ロケーションプロセッサは、測位信号に基づいて無線装置の初期位置を決定する。測位信号が利用可能なものとして検出される場合、コントローラは省電力イベントを生成する。コントローラは、省電力イベントのタイミングおよび期間を決定する。省電力イベント中、無線装置の消費電力を低減するために、SPS受信機は非アクティブにされ、及び/または測位信号の処理はサスペンドされる。初期位置は、省電力イベント中に1以上のセンサからの相対的な測位情報に基づいて更新される。コントローラは、SPS受信機をアクティブにし、省電力イベントに続く測位信号の処理を再開する。  (もっと読む)
(もっと読む)
61 - 80 / 233
[ Back to top ]