
Fターム[5J062DD25]の内容
Fターム[5J062DD25]に分類される特許
21 - 40 / 233
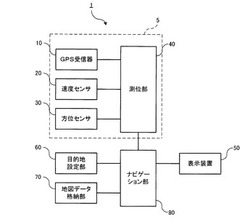
移動体用測位装置及びカーナビゲーション装置
【課題】測位精度を維持しながら省電力化が可能な移動体用測位装置を提供する。
【解決手段】GPS受信器10で、GPS衛星から送信される信号を受信し、受信した信号に基づいて車両の現在位置を検出する。制御部40では、車速センサ20により検出した車両の走行速度と方位センサ30で検出した車両の方位に基づいて、車両の現在位置を推測する。推測した車両の現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正した後、GPS受信器10の電源をオフし、その時点から、車速センサ20の車速検出誤差及び方位センサ30の方位検出誤差のうち少なくとも1つの誤差の時間経過に伴う累積値に基づき、車両の推測現在位置の誤差を算出し、誤差が予め設定した許容範囲を超えたときに、GPS受信器10の電源をオンして、車両の推測現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正するという動作を繰り返す。
(もっと読む)
車両用軌跡推定装置

【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
累積誤差を占めるパラメータ推定値のための信頼性指標
【課題】相関分析を用いて、信号から導出されるパラメータ推定値のための信頼性指標を生成する方法を提供する。
【解決手段】非視線信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得すること、及び/又は複数経路信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得することによって開始する。これらインジケーションに応じて、パラメータ推定値について信頼性指標を導出する。このパラメータ推定値は信号の到着時間推定値であり、信頼性指標は到着時間推定値の自乗平均平方根誤差である。そしてピークにおける相関関数の強度の測定値に基づいて、非視線信号条件が存在するか、あるいは存在しそうであるかを示すインジケーションを取得する。ピークにおける相関関数の強度測定値は、合計受信出力で除されたチップ毎のエネルギー(EC/I0)であるか、又はピークにおける相関関数のエネルギーである。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星から通知され、その航行衛星に搭載された時計が示す時刻の有効期間を延長する測位支援装置に関し、精度よく安定に航行衛星から正常に受信された衛星時刻の有効期間を大幅に延長することができることを目的とする。
【解決手段】時系列iの順に、航行衛星によって航法データが送信された時刻ti以降における前記航行衛星上の時刻Tiを個別に与え、かつ前記航法データで与えられる予測関数Fpiを蓄積するログ手段と、前記時系列iにおける値が前記時刻Tiの近似値もしくは前記時刻Tiであり、かつ前記時系列iの逆順に先行する所定の数Nの時点において、前記予測関数Fpiに対する偏差が既定の範囲に抑えられ、あるいは最小である予測関数Fpi′で前記予測関数Fpiを補完する補完手段とを備える。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
衛星信号の搬送波位相測定値を使用した位置決定
【課題】初期の位置から複数の連続する位置へと移動する移動ユニットの相対的位置を判定する方法及び装置を提供する。
【解決手段】移動ユニットは、複数のナビゲーション衛星から信号を受信し、移動中にそれらの信号の搬送波位相を追跡する。受信された信号のそれぞれについて、搬送波位相増分が複数のエポックにわたって計算される。異常な搬送波位相増分が、さらなる計算を基に判定され排除される。次いで、排除されない搬送波位相増分を使用して、時間エポックのそれぞれの間の座標増分を計算する。排除後の搬送波位相増分の残りの数が、特定のエポックを対象とする閾値よりも少ない場合は、当該特定のエポックの間の座標増分は、以前のエポックからのデータを使用して外挿することができる。他の実施例では、最小2乗法及びカルマン・フィルタリングを使用して、座標増分を計算する。次いで、移動ユニットの位置を複数の時間エポックにわたる座標増分を順次合計し、その初期の位置と相対的に判定することができる。
(もっと読む)
位置情報記録装置、同装置を備える撮像装置および位置情報記録方法
【課題】 電波受信不能時には相対的な位置情報を記録し、電波受信が可能になったときに相対的位置情報を測位情報に変換し記録する位置情報記録装置等に関する。
【解決手段】 無線信号を受信する受信手段、測位情報を記録する合図を発する操作手段、無線信号に基づいて地理的位置を測位し測位情報を算出する位置情報算出手段、測位情報を記録する測位情報記録手段、基準位置からの方向と移動距離からなる変位情報を算出する移動軌跡情報算出手段、合図が発せられたとき測位情報が得られていないときには変位情報によって基準となる位置からの相対的な位置に係る相対位置情報を算出し合図に係る情報と関連づけて記録する相対位置情報記録手段と、測位情報が得られたとき、相対位置情報記録手段にすでに記録されている相対位置情報を測位情報に変換する位置情報変換手段、を有する位置情報記録装置による。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
測位装置及び方法
【課題】WLAN測位により特定された位置が信頼できるかどうかを判定すること。
【解決手段】位置を測定する測位装置は、アクセスポイントからの電波に基づいて、測位を行うWLAN測位演算部と、測位衛星からの電波に基づいて、測位を行う衛星測位部と、衛星測位部による測位の際に取得されるべき位置情報又は測位位置に基づいて、該位置情報又は測位位置から所定の範囲に、WLAN測位演算部による測位結果が存在するかどうかを判定する測定結果判定部と、判定された結果に基づいて、測位結果を採用するかどうかを判定する測位結果採用判定部とを有する。
(もっと読む)
端末、端末制御方法及びプログラム
【課題】携帯端末10において、間違っている現在位置の表示は中止するとともに、正しい現在位置情報をユーザに提示することにして、提示情報の信頼性についてのユーザの不信感を防止する。
【解決手段】GPS電波から現在位置を測位して、位置情報として記憶する。中心が前回の位置情報P1であって半径が前回の位置情報P1−今回の位置情報P2間の距離である円W2を設定し、円W2を今回の存在エリアとして表示部14に表示する。
(もっと読む)
移動体の位置検出方法
【課題】フォークリフトなどの移動体の位置及び向きを簡易に推定する方法を提供する。
【解決手段】複数の柱が平面視で格子状に配置された対象エリア内において、検出感度に指向性を有する複数のRFIDタグを、指向性の向きが該格子方向と一致するように複数の柱に配備する。また、フォークリフト5に、RFIDタグを検出するリーダ装置と、RFIDタグとリーダ装置の間で電波の送受信を行うアンテナとを配備する。さらに、検出されるRFIDタグの対象エリア内における配置とフォークリフト5の対象エリア内における推定位置との関係を示す位置推定パターンを備えておく。複数の柱に配備されたRFIDタグを、アンテナから送受信される電波を介して、リーダ装置で1つ以上検出し、検出されたRFIDタグの対象エリア内における配置に対応する位置推定パターンを判別することで、フォークリフト5の位置を推定する。
(もっと読む)
位置推定装置、位置推定方法及びプログラム
【課題】高い精度で移動局の位置を推定する。
【解決手段】位置が既知である複数の基地局20と位置推定対象である移動局10との一方向又は双方向通信により取得した所定の信号に基づき、複数の基地局20と移動局10との観測距離を計測する距離計測部32と、距離計測部32により計測された複数の基地局20の観測距離に基づき、予め定められた移動局の推定初期位置40の方向に各基地局20の観測座標を決定する観測座標決定部34と、観測座標決定部34により決定された複数の基地局20の観測座標から移動局10の代表位置を移動局10の推定位置50として算出する推定位置算出部36と、を有する位置推定装置を提供する。
(もっと読む)
可搬型携帯端末及び方位推定プログラム
【課題】高精度な方位推定を実現する。
【解決手段】水平分力期待値推定部40が、可搬型携帯端末100の位置情報(Pos)に対応する、地磁気の水平分力の大きさの期待値(Mag_Hor_Ex)を取得し、選択部50は、地磁気センサ14において検出された地磁気の水平分力の大きさ(Mag_Hor)が、期待値から所定範囲内にあるか否かを判定し、その判定の結果、検出された水平分力の大きさが、所定範囲内にあると判定された場合に、地磁気センサ14の検出結果を用いた推定方位(Dir_Mag)を出力する。
(もっと読む)
位置推定装置及びプログラム
【課題】精度よく移動体の位置を推定する。
【解決手段】車両に搭載される位置推定装置であって、GPS情報取得部20で、複数のGPS衛星の各々から発信された、各々のGPS衛星の軌道情報、GPS擬似距離データ、及びドップラー周波数情報を含むGPS情報を取得し、軌跡推定部40で、取得されたGPS情報に基づいて自車両の速度ベクトルを算出し、算出した速度ベクトルを所定時間分積算して自車両の軌跡を算出する。また、取得したGPS擬似距離データ及びGPS衛星の軌道情報から取得されるGPS衛星の位置座標を擬似距離・衛星位置記憶部に記憶しておく。そして、最適化位置推定部60で、自車両の軌跡上のエポック毎の各GPS衛星との距離と、そのエポックにおける擬似距離との擬似距離差分の全GPS衛星の全エポック数分の和が最小となるように自車両の軌跡を平行移動させて移動体の位置を推定する。
(もっと読む)
インフラストラクチャデバイスおよび端末デバイスの位置決定
位置推定装置
【課題】GPS測位精度を向上させるためのリファレンスとなる基地局の設置をせずに、三角測量による位置決めに用いる距離計測が不安定な場所での測位精度を向上させることが課題である。
【解決手段】GPSやその他の三角測量を用いて移動体の位置を推定する装置において、他の移動体やセンタ等と通信手段により、自信からはまだ得られていない距離計測情報を取得する。また、他の移動体までの相対位置を距離計測手段により計測する。相対位置が計測された移動体間の相対距離を、まだ得られていない距離計測情報に適切な変換をかけて付与することにより、測位計算に最低限必要な3点からの距離情報が得られたと同等の連立方程式を解くことで距離計測が不安定な場所でも測位可能となる。
(もっと読む)
支援型ユーザプロファイルによる性能向上した屋内ポジションロケーションのための方法および装置
ワイヤレス通信の方法は、ユーザプロファイル情報を保持することと、複数のポジションロケーションを受信することと、失敗した相関を決定するために、受信したポジションロケーションを相関させることと、受信したポジションロケーションにギャップがあるか否かに基づいて、ブラックアウト期間を決定することと、失敗した相関とブラックアウト期間とに対するロケーション情報を取得することと、取得したロケーション情報に基づいて、ユーザプロファイル情報を更新することと、緊急事態の通知を受信することと、ユーザプロファイル情報、または、緊急事態の通知とともに受信した緊急時のポジションロケーションのうちの少なくとも1つに基づいて、緊急事態の通知に応答することとを含む。 (もっと読む)
屋内の検出に基づいて無線端末の位置を推定するための検索エリア削減
【課題】 無線端末向けの位置固有の支援データを生成する目的で、非GPS導出の技術を使用して、Assisted GPS機能を備える無線端末の位置を推定する方法を提供すること。
【解決手段】 無線端末は、支援データを使用して、1つ又は複数のGPS信号を取得及び処理し、無線端末の位置の証明となる情報を導出する。GPSで導出された位置情報は、次いで、非GPS導出の位置と組み合わせられて、GPS又は非GPSどちらかのみで導出するよりも良好な無線端末の位置の推定を形成する。このGPS導出技術と非GPS技術の組み合わせは、無線端末が1つ又は2つのGPS信号しか取得することができない場合に特に有用である。その理由は、2つのみのGPS信号だけで無線端末の位置を求めることは可能でないためである。
(もっと読む)
現在位置表示装置
【課題】GPS信号を再度受信した際に、GPS信号に基づく現在位置と、表示位置とが離れている場合に、スムーズにその誤差を解消して表示する。
【解決手段】GPS受信手段に基づいて現在位置を算出し、現在位置マークを表示する現在位置表示装置において、前記現在位置表示装置は、前記GPS受信手段によりGPS信号が受信できなくなった後、再度前記GPS信号が受信されると前記現在位置算出手段により前記再度GPS信号が受信された現在位置が算出され、該算出された現在位置と前記現在位置マークの位置とが所定距離以上離れているか否かを判定する位置比較手段を備え、前記表示位置決定手段は、前記位置比較手段が所定距離以上離れていると判定した場合、前記現在位置マークの位置を前記現在位置算出手段により算出された現在位置に段階的に近づくように移動させる。
(もっと読む)
21 - 40 / 233
[ Back to top ]