
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
661 - 680 / 873
レーダ装置
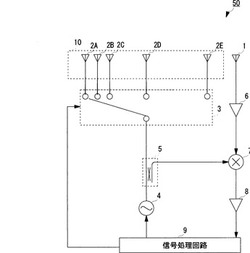
【課題】アンテナアレイの探知領域にグレーティングローブが発生せず、高い角度分解能を持ち、物標の方位を高精度に探知できるレーダ装置の提供を図る。
【解決手段】レーダ装置50は、アンテナ素子2A〜2Eを不等間隔に配列したアンテナアレイ10と、アンテナ素子2A〜2Eを切り換えながら選択するスイッチ回路3とを備え、スイッチ回路3が選択したアンテナ素子から探知信号の送信を行う。スイッチ回路3は、アンテナ素子間の配置間隔の比と等しい時間間隔の比で、アンテナ素子を切り換える。
(もっと読む)
レーダ装置及びレーダ画像表示方法

【課題】異なるパルス幅の信号から得られた画像を同一画面上に同時に表示する場合であっても、すべてのレンジで同じ内容の追尾物標の運動情報を表示できるレーダ装置及びレーダ画像表示方法を提供することを目的とする。
【解決手段】所定の送信パターンで送信した2以上の異なるパルス幅信号を受信し、該受信した同じ送信パルス幅のエコー信号毎に、探知レンジに対応する表示用エコーデータを生成するエコーデータ生成部と、異なる送信パルス幅のエコー信号を用いて、表示用エコーデータと重畳する1つの追尾物標の運動情報を生成するARPA処理部と、前記ARPA処理部で生成された追尾物標の運動情報を、前記表示用エコーデータに重畳する表示出力合成部と、前記表示出力合成部で重畳した画像を表示する表示部とを備えることを特徴とする。
(もっと読む)
地中埋設管路の調査方法
【課題】地中レーダを用いて埋設管の位置を調査するときに、従来よりも深い位置まで調査できるようにする。
【解決手段】地中に埋設された管11に沿ってボーリング孔14を形成する。ボーリング孔14と地表2との間で電磁波16の送受信を行うことによって、管11の埋設位置を検出する。
(もっと読む)
立体物認識装置
【課題】周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする。
【解決手段】ステレオカメラ2の撮像画像に基づく画像立体物の存在確率を画像立体物存在確率算出部11で算出し、ミリ波レーダ3の出力に基づくミリ波立体物の存在確率をミリ波立体物存在確率算出部12で算出し、レーザレーダ4の出力に基づくレーザ立体物の存在確率をレーザ立体物存在確率算出部13で算出する。そして、存在確率補正部14で、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率を、各認識センサの認識率に基づいて補正し、総合存在確率設定部15で、補正後の存在確率をフュージョンして総合存在確率を設定することで、障害物への接触回避や警報等の制御を確実且つ最適なタイミングで実行可能とする。
(もっと読む)
信号源位置推定方法
【課題】複数の方向からの相互に相関がある広帯域信号をアレイ受波器で受信し、計算量の少ない信号処理で信号源位置を推定可能にすること。
【解決手段】アレイ受波器のアレイを分割して複数のサブアレイを設定し(S11)、各サブアレイで信号源方向を推定する(S12)。次に、サブアレイの幾何学的配置関係と信号源方向を元に信号源候補位置を算出す(S13)。次に、信号源候補位置を信号源位置探索範囲の所定分解能範囲内で統合し、統合後の信号源候補位置に評価量を与える。この評価値が所定閾値値以上の信号源候補位置を選択し(S14)、この信号源候補位置を初期値とし、アレイ受波器出力によって決まる評価値の多項式で近似を利用して信号源位置の推定精度を向上させる(S15)。
(もっと読む)
車両の周辺監視装置、車両、車両の周辺監視方法、および車両の周辺監視用プログラム
【課題】撮像装置の撮像画像から抽出された対象物の種別の判断処理の演算処理負荷を軽減することができる車両の周辺監視装置を提供する。
【解決手段】撮像装置2R,2Lの撮像領域に存在する対象物を検出するミリ波レーダ装置20を車両10に備える。ミリ波レーダ装置20は、送信したミリ波の反射波のうち、所定強度以上の強度を有する反射波を受信し、その反射波に基づき、対象物を検出する。検出される対象物は、人などの生体以外の物体となる。撮像装置2R,2Lの撮像画像からの対象物の抽出結果と、ミリ波レーダ装置20の検出結果とを基に、対象物の種別を判断する。
(もっと読む)
無線ローカリゼイション装置および方法
デバイスのロケーションは、別のデバイスに対して決定されることができる。例えば、ロケーティングデバイス(102)は、それがターゲットデバイス(104)に対して少なくとも1つの距離を測定するとき、動くことができる。ロケーティングデバイスは、そのあと、測定された単数の距離あるいは複数の距離に関連する1以上のインジケーションを生成することができる。ロケーティングデバイスは、さらに、ターゲットデバイスに対する1以上の決定された方向を関連づける1以上のインジケーションを生成することができる。ターゲットデバイスは、ターゲットデバイスのロケーションを決定するために、あらかじめ決定された方法で、動くことができる。デバイスの各々は、ロケーション決定オペレーションのために、単一のトランシーバ(208、212)および単一のアンテナ(210、214)を使用することができる。 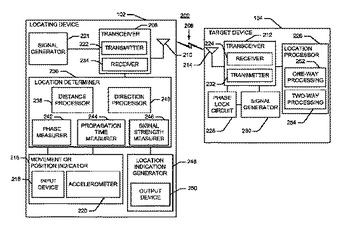 (もっと読む)
(もっと読む)
車両用物体検知装置
【課題】検知データがゴーストである可能性を判断して制御対象物体判定条件を変更して割り込み車両などを早期に制御対象と判定すると共に、検知精度の低下も回避するようにした車両用物体検知装置を提供する。
【解決手段】検知されたターゲットの判定領域での検知状態が所定の判定条件に合致するとき、検知されたターゲットを制御対象物体と判定し、相対距離や相対速度などの相対関係に基づいて今回検知されたターゲットの前回検知時の位置と次回検知時の位置の少なくともいずれかを推定すると共に(S102,S112)、検知されたターゲットの今回位置と推定された位置とに基づいて判定条件を変更する(S104からS118)。
(もっと読む)
標定レーダ装置
【課題】 機動性を損なうことなく全方位を監視し位置標定を行なうことの可能な標定レーダ装置を得る。
【解決手段】 標定レーダ装置の空中線部11を、互いに異なる仰角にペンシルビームを有する2つのアンテナ111及び112で構成するとともに、これら2つのアンテナを、方位方向の指向方位が互いに反対となるように配置する。そして、この空中線部11を駆動部12により方位方向に高速回転駆動することによって、異なる2つの仰角の全周方向に目標を捕捉するためのビーム幕を形成する。
(もっと読む)
相手船動静監視装置
【課題】 Bスコープ座標で示される相手船妨害ゾーンの映像と平面座標で示されるレーダ映像との関係が容易に理解できるようにする。
【解決手段】
相手船妨害ゾーンを示す船舶航行支援装置の表示画面1とレーダ装置の表示画面9とは近接して配置される。それらの画面1,9は、VRMとEBLとにより相互に連動するようにされている。
(もっと読む)
物体検知装置
【課題】ノイズに対する耐性の高い物体検知装置を実現すること。及び、それを用いて、自車両の運動を推定する信頼性の高い車両運動推定手段を提供すること。
【解決手段】上昇変調区間では上昇区間レーダ画像を周波数の正の方向にシフトさせ、下降変調区間では逆に負の方向に下降区間レーダ画像を同じ量だけシフトさせて、最も大きな相関(よって最も小さな相関値SADまたはSSD)を与える周波数シフト量Δfを求める。これらの演算の結果、2つのレーダ画像を最もよく一致させるf軸方向の周波数シフト量Δfが得られ、このシフト量Δfに基づいて、自車両の車速Vを算出することができる。また、Δfが与える照合点から得られる、ドップラーシフトが排除されたレーダ画像上の移動物体を除去して静止物体レーダ画像を生成し、更にそれらを異時刻間で照合すれば、車速計を用いなくても自車両の運動を確実かつ正確に推定することができる。
(もっと読む)
電波探知装置および方法
【課題】前方の探知対象物の誤探知を低減できるようにする。
【解決手段】例えば、モノパルス式レーダは、最初に、広角送信アンテナからの送信信号に対する受信信号が受信された場合(S1乃至S3YES)、その受信信号から角度を演算し、その角度に基づいて前方ターゲットの存在可能性があるか否かを判定する(S4,S5)。存在可能性があると判定した場合、モノパルス式レーダは、広角送信アンテナよりも指向性の半値角が狭角の狭角送信アンテナに切り替え(S6)、狭角送信アンテナからの送信信号に対する受信信号から角度を演算し、その角度に基づいて前方ターゲットを探知したか否かを判定する(S7乃至S10)。そして、前方ターゲットを探知したと判定した場合、モノパルス式レーダは、ターゲット探知信号を出力する(S11)。本発明は、モノパルス式レーダに適用可能である。
(もっと読む)
レーダ装置
【課題】複数の周波数を用いることなく、マルチパス環境下における受信信号のレベル低下を防止し、目標高度を高精度で測定できるレーダ装置を提供する。
【解決手段】全開口で送信した送信波に対する反射波を受信してΣビームおよびΔビームを生成するアンテナ2と、アンテナからのΣビームおよびΔビームを合成することによりアンテナの開口面を高さ方向に変えた複数のビームを生成するビーム合成器41と、ビーム合成器で生成された複数のビームの中から最大レベルを有するビームを基準ビームとして選択する最大値選択処理器42と、最大値選択処理器から出力される基準ビームに基づき測角を行って目標高度を出力する測角処理器46とを備える。
(もっと読む)
レーダ装置
【課題】レーダ装置と観測目標との間に相対運動がある場合にも、効率的なビーム走査を実現することのできるレーダ装置を得る。
【解決手段】波動を空間へビーム状に放射するビーム放射部20、30と、ビーム放射部が放射するビームの向きを走査するビーム走査部40とを備えたレーダ装置において、ビーム走査部40は、観測領域に隙間を持たせるように1回の走査を行い、複数回の走査を行うことにより観測領域のすべての走査を行うものである。
(もっと読む)
車載用レーダ装置
【課題】車輌の走行状況に応じてレーダの照射方向を適切に変更可能な車載用レーダ装置を提供する。
【解決手段】車速センサ14からの車速Vから捕捉距離dを算出し、捕捉距離dと車輌の旋回半径Rとからレーダの走査の角度θを計算する。レーダ16において角度θの方向に基いて照射方向を走査する。2輪車の場合、傾斜センサ18からの傾斜角度ψと車速Vとから旋回半径Rを算出する。
(もっと読む)
方位検出装置
【課題】 構成が簡易で少ない処理量にて位相折り返しに起因する誤検出を防止可能な方位検出装置を提供する。
【解決手段】 レーダ波を用いて検出された対象物標の距離,相対速度,方位に基づいて、CCDカメラ16で撮像される撮像画面上で対象物標が検出されるべき位置を算出し、その算出された位置に物標が存在するか否かを判断する(S210〜S230)。物標が存在しなければ、対象物標の方位の算出に用いた受信信号の位相差Δθに、位相の折返しがあったものとして改めて方位を算出し、この方位を用いて撮像画面上で対象物が検出されるべき予測位置を算出して、その予測位置に物標が存在すれば、その予測位置の算出に使用した方位を対象物標の方位とする方位補正を行う(S240〜S260)。
(もっと読む)
レーダ装置
【課題】
受信アンテナのサイズを大きくすることなしに、サイドローブを低減するレーダ装置を提供する。
【解決手段】
本発明は、送信波を送信する送信部と、送信波を受けた物体からの反射波を受信する複数のアンテナと、各々のアンテナに受信される受信信号の位相差に応じて、反射波の強度の角度スペクトラムをデジタルビームフォーミングを用いて算出し、物体の存在する方向を判定する信号処理部とを有するレーダ装置であって、信号処理部は、アンテナの各々に対応する第一の係数群を受信信号の各々に乗算し、第一の角度スペクトラムを算出し、アンテナの各々に対応する第二の係数群を受信信号の各々に乗算し、第二の角度スペクトラムを算出し、第一及び第二の角度スペクトラムに設定される所定の閾値を、双方の角度スペクトラムにおいて越える角度範囲に、物体が存在すると判定することを特徴とする。
(もっと読む)
物体判定装置、方法及びプログラム
【課題】前処理を行うことなく、移動物体であるか静止物体であるか判定する。
【解決手段】物体判定装置は、物体までの距離を測定して距離データを生成する距離測定装置1と、距離データから位置データを生成する処理を行う距離データ処理部2と、位置データを記憶する位置データ記憶部3と、位置データの集合である位置データ集合を抽出する位置データ集合抽出部4と、位置データ集合の領域面積に基づいて物体が移動物体であるか静止物体であるかを判定する移動物体判定部5と、を備えている。
(もっと読む)
目標航跡相関装置及び目標航跡の相関判定方法
【課題】各センサから得られる複数の目標速度がほぼ同一の場合においても誤相関を軽減できるようにした目標航跡相関装置を提供する。
【解決手段】複数のセンサの各々により得られる目標に関する複数の航跡情報が同一の目標に関する情報であるか否かを判定する目標航跡相関装置において、各センサが求めた目標の追尾速度ベクトルのなす角度を算出する目標追尾速度ベクトル差算出器と、前記センサにより得られる航跡情報の誤差を追尾回数毎及びセンサ毎に予め設定しテーブル化した追尾誤差テーブルと、前記航跡情報の誤差に基づいて、前記目標の追尾速度ベクトルのなす角度の相関しきい値を設定するしきい設定器と、前記目標の追尾速度ベクトルのなす角度と、前記相関しきい値とを比較して、前記複数の航跡情報が同一の目標に関する情報であるか否かを判定する航跡相関判定器とを備えるようにした。
(もっと読む)
物体検出方法および物体検出装置
【課題】複数種類の物体の検出が可能であり、かつ、検出精度の向上をはかることができる物体検出装置を提供すること。
【解決手段】カメラ1とレーダ2とから得られる情報に基づいて物体を検出するコントロールユニットCUが、入力した情報に対して物体検出用の所定の変換を行う情報変換処理と、入力情報と変換情報との少なくとも一方の情報に対し、検出対象となる物体との相関性に対応して重み付けを行う重み付け処理と、この重み付けした後の情報に基づいて物体の検出を行う検出処理と、を実行するようにした。
(もっと読む)
661 - 680 / 873
[ Back to top ]