
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
741 - 760 / 873
物体姿勢検出システム及びこれを備えた移動体並びに無線タグラベル及び無線タグ情報読み取り装置
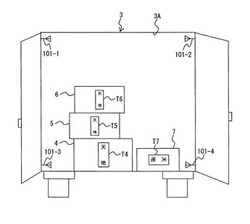
【課題】物体の姿勢を検出することができる物体姿勢検出システム及びこれを備えた移動体並びに無線タグラベル及び無線タグ情報読み取り装置を提供する。
【解決手段】検出対象の荷物4〜7と、この荷物4〜7に所定の配置で複数設けた無線タグ回路素子Toと、これら複数の無線タグ回路素子Toと無線通信を行うRF通信制御部140及びアンテナ101−1〜4と、このRF通信制御部140及びアンテナ101−1〜4による通信結果に基づき、荷物4〜7の姿勢を検出する制御装置103のCPU121とを有する。
(もっと読む)
無線タグ探索方法および装置

【課題】
無線タグの位置の探索を支援する。
【解決手段】
無線タグの位置を探索する際に、無線装置は無線タグに対してID番号の送信を要求する。無線タグが送信した電磁波を受信した無線装置は、電磁波の受信強度と、無線装置のアンテナの受信特性と、物体に取り付けられた状態における無線タグの送信特性と、空間を伝搬する電磁波強度と伝搬距離との関係を表す計算式に基づいて、無線装置から無線タグまでの距離や方向を推定し、その推定位置を無線タグのID番号と関連付けて表示する。複数回の探索により無線タグの位置を特定するため、無線装置の向きを指示し、各探索で推定された推定位置の重なりを表示する。
(もっと読む)
車両周辺物体検知装置およびシステム
【課題】 静止物を正確に検知することができる「車両周辺物体検知装置およびシステム」を提供すること。
【解決手段】 車両周辺物体検知装置には、車両周辺の物体を検出するレーダ処理モジュール10、位置算出部12と、車両の走行状態を含む車両情報を取得する車両情報取得部14と、検出された物体の検出履歴情報を車両情報とともに格納する検出履歴DB20と、新たに物体が検出されたときに、そのときの車両情報を検索キーとして、この検出された物体と一致する物体が存在するか否かを検出履歴情報に基づいて検索し、一致する物体の存在が確認されたときにこの物体を静止物として判定する静止物判定部30とが備わっている。
(もっと読む)
物品管理システム
【課題】物品管理におけるセキュリティーを向上させる。
【解決手段】管理対象物品302に関連づけて取り扱われる物品用無線タグTbの移動を、無線通信を介して検出するリーダ101と、管理者用の保安情報収集として所定方向の撮像を行うカメラ装置102及び管理者へ保安情報の音声報知を行うブザー104と、リーダ101の検出結果に基づき、カメラ装置102及びブザー104を作動させる管理サーバ103とを有している。また、リーダ101は、管理対象者303に関連づけられる対象者用無線タグTtが通信範囲内に位置することを検出し、特定の管理対象者303に対応する前記対象者用無線タグTtを検出した場合に、管理サーバ103はカメラ装置102及びブザー104の作動を禁止する。
(もっと読む)
パラメトリックリフレクティブ技術を用いたRFIDシステム
【課題】無線周波数アンテナを用いて情報を符号化および復号するシステムおよび方法を提供すること。
【解決手段】本RFIDシステム10は、少なくとも一つ以上のインテロゲータ装置とRFIDデータタグを備える。RFIDデータタグは、基板または物体に直接形成された複数のアンテナ素子を有する。アンテナ素子は、配向と、偏波および位相情報を提供する寸法とを有しており、この情報はRFIDタグ200の符号化された情報を表している。インテロゲータ装置は領域をスキャンし、レーダーイメージング技術を用いてスキャン領域の画像を生成する。この装置は、データタグのアンテナ素子から再放射されたRF信号を受信する。データタグは画像に表されることが好ましい。再放射されたRF信号は、各アンテナ素子の偏波および位相情報を含むことが好ましく、この情報からRFデータタグ200の情報を復号するため、レーダー信号イメージングアルゴリズムを用いる。
(もっと読む)
物体検知装置
【課題】 簡単な構成で二つの方向を同時に検知することが可能な物体検知装置を提供する。
【解決手段】 レーダ送受信部12から送信された電磁波Poutは、半透過板13で一部が透過されて透過波Ptとなり、残りが反射されて反射波Prとなる。透過波Ptまたは反射波Prが物体により反射されると、反射された電磁波は半透過板13を介してレーダ送受信部12で受信される。物体検知部11は、この受信した電磁波Pinと送信された電磁波Poutとに信号処理を行い、透過波Ptまたは反射波Prを反射した物体までの相対距離あるいは相対速度を算出する。
(もっと読む)
レーダ装置
【課題】レドーム表面に付着する汚れを誤検出することなく、確実に、かつ、早急に検出することができるレーダ装置を得る。
【解決手段】対象物に対して電波を送信するとともに、対象物で反射された反射波を受信する送受信共用アンテナ306と、送信信号と受信信号とをミキシングしてビート信号を生成するミキサ307と、ビート信号に基づいて対象物までの距離および相対速度を計測する信号処理部312とを備えている。送受信共用アンテナ306は、汚れ検出モード時には、特定のタイミングで無変調波をパルス変調して送信する。当該無変調パルスが送信された場合には、ミキサ307によって生成されるビート信号は、A/D変換器310によりデジタル電圧値に変換される。信号処理部312は、A/D変換器310の出力に基づいて、送受信共用アンテナ306のレドーム314に付着した汚れを検出する。
(もっと読む)
レーダ装置の信号処理方法
【課題】 レーダ装置を小型化してかつ精度を向上させる。
【解決手段】 FM−CW方式のレーダ装置において、ビート信号を、FFT回路40によって周波数変換する。信号処理回路44は、まず、増加期間及び減少期間毎に、各期間に得られたビート信号の周波数成分を用いて、周波数および測定角度に対するビート信号の信号レベルの分布を求め、各期間の分布を表す曲面の極大点の信号レベルLpおよび周波数fpならびに角度範囲の中心角度θmおよび角度幅Δθaを、極大点のデータの変数として求める。さらに、両期間の極大点のデータを比較して、変数の差が基準値未満である極大点の組合わせを求め、その極大点のデータに基づいて、目標物とレーダ装置との相対距離および相対速度、ならびに目標物の位置および大きさを求める。これによって、送信波のビーム幅を狭くすることなく、目標物の位置および大きさを求めることができる。
(もっと読む)
防犯センサ
【課題】誤報が発生することを極力回避するとともに、特定方向の検知を禁止したり方向によって検知感度を変更可能とすることで動作の信頼性を高めることが可能な防犯センサを提供する。
【解決手段】検知エリア内に存在する物体までの距離に対応する距離情報を出力するマイクロウエーブセンサ320と、方向可変アンテナ装置310と、走査測定手段331と、物体移動距離認識手段336と、検知対象物体存在判別手段332と、受動型赤外線センサ140と、方向記憶手段335と、警告信号出力制御手段333とを備え、走査測定手段331によって求められた物体が存在する方向と方向記憶手段335に記憶されている検知制限方向情報のいずれかに対応する方向との差が所定範囲内であれば、検知対象物体存在判別手段332において検知対象物体が存在しているか否かの判別に用いられる閾値がより大きな値に変更される。
(もっと読む)
レーダ装置
【課題】 到来方向推定処理において、分解能を高めるために過去情報を用いると、演算量が莫大に増加する問題がある。
【解決手段】 アレイ状の受信手段と、前記受信手段により受信した前記反射波に基づき、前記アレイ毎のビート信号を各々生成する受信部と、複数の前記ビート信号に基づき相関行列を演算する相関行列演算手段と、複数の前記相関行列を記憶する記憶手段と、前記相関行列演算手段により演算される複数の前記相関行列と、前記記憶手段に記憶された所定時間前の複数の相関行列とを加算した加算相関行列を複数演算し加算相関行列群として出力する加算手段と、前記ビート信号を用いて所定条件を満たす周波数を検出する検出手段と、前記加算相関行列群の中から、前記周波数に最も近い加算相関行列を抽出行列として抽出する抽出手段と、前記抽出行列を用いて前記レーダ装置から前記検出対象物に対する方向を演算する。
(もっと読む)
防犯センサ
【課題】検知対象物体の移動方向や位置に関わらず常に的確な検知を行うことができる信頼性の高い防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体からの反射波を受信して、その物体までの距離に対応する距離情報を出力するとともに、その物体の方向情報を出力するマイクロウエーブセンサ320と、これによって得られる2次元物体位置情報の時間的な変化に基づいて前記物体の移動パターンを認識し、その移動パターンに基づいて前記検知エリア内に検知対象物体が存在しているか否かを判別する検知対象物体存在判別手段332と、この検知対象物体存在判別手段によって検知対象物体が存在していると判別された場合に警告信号を出力するように制御する警告信号出力制御手段333とを備える。
(もっと読む)
レーダ装置
【課題】 2周波CWモノパルス方式のレーダ装置において、移動する人からの反射波はドップラ信号の周波数スペクトルに先鋭なピークを生じにくく検出しにくい。
【解決手段】 2つの受信部によりLチャンネル、Rチャンネルのドップラ信号を取得する。各チャンネルの2周波の送信波に対するドップラ信号からLチャンネルの距離情報350,Rチャンネルの距離情報352を取得する。周波数毎に両距離情報の差の絶対値354を求め、その絶対値が所定の閾値DErrを越える帯域358はノイズ信号を含むものとして除去し、物体からの反射波に基づくドップラ信号を含む有効周波数帯域を取得する。同様に、両チャンネルのドップラ信号に基づいて、反射波の到来する角度情報を送信周波数に対応して2種類取得し、それらの相関に基づいて有効周波数帯域を抽出する。取得した有効周波数帯域の情報に基づいて移動物体の検知、位置等の測定を行う。
(もっと読む)
レーダ装置
【課題】 各アンテナの特性バラツキに影響されることなく、確実に且つ高速にターゲット方位を算出するレーダ装置を提供する。
【解決手段】 ターゲット方位検出部16は、取得した受信ビーム強度をEEPROM17から読み出した補正値で補正する。これにより、アンテナの個体毎に異なるビーム特性の影響が除去され、基準となるアンテナによる指向性に準じた受信ビーム強度が得られる。ターゲット方位検出部16は、この補正後の受信ビーム強度を用いて、極大値となる受信ビーム強度とこれに隣り合う次に大きい受信ビーム強度とを比較して、比較値を算出する。ターゲット方位検出部16には、予め比較値に対する方位が関連付けされた方位算出テーブルが記憶されており、このテーブルを用いて算出された比較値からターゲット方位を算出する。
(もっと読む)
分散ネットワーク・レーダ装置
【課題】 複数のレーダを使用して探知能力の拡大を図るレーダ装置において、車載移動型捜索レーダのように、設置場所が探索の都度に移動するために各レーダの周囲の地形環境が変化する場合であっても、電波干渉の影響を受けることなく、探知能力の拡大を図ることができる分散ネットワーク・レーダ装置を提供する。
【解決手段】 レーダ1とレーダ2を相互にネットワーク連接し、前記各レーダ間の送受信同期のために送受信同期部7−1で制御し、前記各レーダ毎に設置された送信部1−1及び2−1から互い相異なる周波数チャンネルの電波を目標3に向かってアンテナ1−3及び2−3を介して放射し、前記目標3で反射された全ての周波数チャンネルの電波を前記各アンテナ1−3及び2−3を介してそれぞれで受信し、各受信信号の電力振幅検出、ビデオ積分、測角演算、平均演算を行うようにした。
(もっと読む)
飛行場用気象レーダ装置とその風観測運用方法と風観測システム
【課題】飛行場用として、降雨・非降雨にかかわらず、風観測を可能にする。
【解決手段】空中線装置15によりレーダパルスを放射して降雨エコーを受信し、信号処理装置11にてその信号強度から降雨状況を観測して、降雨状況に応じて降雨時観測モードと非降雨時観測モードを選択的に切り替える。ここで、降雨時観測モードでは、エコー成分を観測し、この観測結果から風向・風速を算出するものとし、非降雨時観測モードでは、受信信号を積算してSNを向上させ、ブラック散乱によるエコー成分を観測し、この観測結果から風向・風速を算出する。
(もっと読む)
デジタル信号方式を用いた無線式位置トランスデューサ
【課題】物体を追跡する装置を提供する。
【解決手段】物体を追跡する装置は、物体に取り付けられるように構成された位置トランスデューサを含む。位置トランスデューサは、デジタルマイクロコントローラを含み、そのマイクロコントローラは、複数の出力ピンを含み、マイクロコントローラは、それらの出力ピンの少なくとも一つに、選択された周波数で交流デジタル出力を生み出すように動作する。少なくとも一つの送信アンテナが、少なくとも一つの出力ピンに直接接続されていて、その少なくとも一つの送信アンテナが交流デジタル出力に応答して選択された周波数で磁界を送信するようにされている。フィールドセンサーが、磁界を検出し、その磁界に応答して信号を生み出す。プロセッサがその信号を受信し、位置トランスデューサの座標を求めるために、その信号を処理する。
(もっと読む)
航跡相関統合装置
【課題】目標情報のより状況認識を行い易い表示を提供できる航跡相関統合装置を得る。
【解決手段】最初の航跡相関統合は、レーダ航跡生成部1で生成された航跡と角度センサ航跡生成部2で生成された航跡の全ての組合せの相関の尤度を計算して航跡同士の組合せの相関の有無を判定し、2回目以降の航跡相関統合は、レーダ航跡生成部1及び角度センサ航跡生成部2で生成された航跡と既存のグループの相関の尤度を計算して前記航跡と前記グループとの相関の有無を判定する航跡相関部3と、航跡相関部3により相関有りと判定された航跡同士、又は航跡と既存のグループは必ず同一のグループに入るようにグループ化し、グループの中心位置と広がりを計算するグループ処理部4と、1対1対応がとれた航跡群は統合航跡を表示し、1対1対応がとれない航跡群は前記グループの中心位置と広がりに基づきグループを楕円で表示する統合航跡・グループ表示部6とを設けた。
(もっと読む)
レーダシステム
【課題】 クロスレンジ分解能を向上し、マルチパス環境下においても測角精度を確保することができ、妨害環境下においても探知/追尾性能を確保することができるレーダシステムを提供する。
【解決手段】 目標4の捜索範囲又は追尾範囲、所望のクロスレンジ分解能、レーダ装置1,2の距離分解能に応じて決定された離隔距離Lだけ互いに離隔してレーダ装置1,2を配置し、レーダ装置1から目標4までの距離Rt1が基準距離を超える場合には、レーダ装置1で測角して生成された方位情報に基づいて目標4の位置を特定し、基準距離以下の場合には、レーダ装置1,2で測定して生成された距離情報に基づいて目標4の位置を特定する。
(もっと読む)
レーダー装置
【課題】 振幅比較モノパルス方式のレーダー装置において、和信号Σ及び差信号Δを算出することなく、計測対象物の方位を速やかに検出する。
【解決手段】 互いに指向性の異なる受信アンテナ100A,100Bと、受信アンテナ100A,100Bの受信電力比Pを算出する手段と、受信電力比Pに基づいて計測対象物の方位nを取得する変換部170とを備える。本発明では、和信号Σ及び差信号Δを算出するのではなく、受信電力比Pを算出し、これに基づいて計測対象物の方位nを取得している。ここで、受信電力比Pは、簡単な四則演算のみによって演算することができることから、非常に高いリアルタイム性を得ることが可能となる。
(もっと読む)
道路形状認識装置
【課題】 路側物の誤検出が生じても、常に精度の高い道路形状認識を行うことが可能な道路形状認識装置を提供する。
【解決手段】 前方レーダで認識された静止物と自車両との相対位置を示した静止物マップ生成し、その静止物マップに示された静止物をグループ化する(S310〜S320)。個々の静止物グループについて、その静止物グループが道路の左右いずれの側に位置するかにより、左用評価マップ又は右用評価マップのいずれかを選択し、自車両から静止物グループまでの距離及び自車速度に基づいて設定した静止物グループの加算値(評価値)を、選択した評価マップに加算する(S330〜S380)。また、評価マップの非加算部分では、減算値(評価値)を評価マップから減算する(S390〜S400)。このようにして生成された評価マップに基づいて道路形状の認識を行う。
(もっと読む)
741 - 760 / 873
[ Back to top ]