
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
821 - 840 / 873
ネットワークレーダシステム
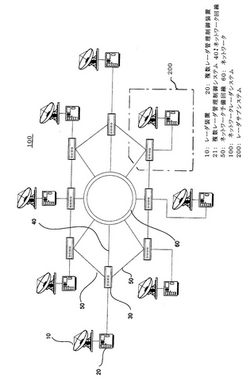
【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
障害物検出装置

【課題】障害物検出装置での障害物検出処理において、演算オーバーヘッドの増大を抑制するとともに、歩行者などの障害物の誤検出や未検出の件数を効果的に削減すること。
【解決手段】 検出結果照合手段160は、距離・方位・相対速度検出手段150の検出結果と立体物検出手段110の検出結果との間で矛盾があった場合に、適応制御の実行指令を発行する制御手段を備えている。即ち、検出結果照合手段160は、その適応制御の実行指令を意味するフィードバック信号S1を検出範囲限定手段141とビーム方向・形状演算手段142に出力する。ビーム方向・形状演算手段142は、ミリ波レーダを構成する各個別アンテナの各受信信号の重み係数Am (複素数;1≦m≦M)を立体物検出手段110の検出結果に適応させて変更する。レーダービーム制御122は与えられた重み係数Am に基づいて各方向毎の探索データ(受信信号)に関する総和を生成する。
(もっと読む)
信号分類装置
【課題】 分類性能の向上した信号分類装置を得る。
【解決手段】 仮説生成手段20は、新たな信号を、どの送信源からの信号であるかを分類した追加仮説と、既に求められている保持仮説とを組み合わせ、新たな信号が放射されたと推定される送信源毎に信号を分類する仮説を生成する。評価値算出手段30は、これらの仮説に対して、各信号の出現時刻の差と継続時間との相関を考慮して定義した適合関数に基づいて、その評価値を算出する。仮説選択手段50は、仮説数減少手段40で評価値に基づいて選択された仮説に基づき、仮説生成手段20への保持仮説を送出する。
(もっと読む)
到来方向推定装置及び到来方向推定方法
【課題】 到来方向推定に必要な演算量を低減しつつ高精度に到来方向推定を行う。
【解決手段】 複数のアンテナ素子の各前記アンテナ素子の受信信号から相関行列を計算し、前記相関行列の固有値を計算し、前記固有値を用いて到来電波の数を推定し、各前記アンテナ素子の受信信号を用いて離散フーリエ変換に基づくアルゴリズムにより到来電波の概略の到来方向を推定し、前記概略の到来方向に基づいて前記到来電波の到来方向を推定する方向範囲としての演算範囲を決定し、前記第1の到来波数と、推定された前記概略の到来方向の数とが一致する場合は前記離散フーリエ変換に基づくアルゴリズム、一致しない場合は当該アルゴリズムより到来電波の検出能力が高いアルゴリズムに基づき、前記演算範囲について到来方向の推定を行う。
(もっと読む)
運転支援装置
【課題】 車両にレーダ装置を設置し、自車に接近する危険度の高いターゲットを見失うことなく追尾して警報し、確実にドライバーをサポートする運転支援装置を提供する。
【解決手段】 水平方向に回転する折りたたみ機構を有するドアミラーケース31L,31Rの内部にレーダ1LD,1RDを設置し、ドアミラーケース31L,31Rの折りたたみ機構を利用して回転させる。これにより、危険度の高いターゲット6をできるだけ長い時間観測し、ドライバーに警報・表示を行う。また、レーダの検出結果から、前方には、自車15が通り抜ける幅がないと判断した場合には、車両後方を視野とする撮像装置を起動し、ドライバーに対して後方の映像を表示して、後退時の後方認知の支援を行う。
(もっと読む)
車載用レーダの電波軸調整装置
【課題】走査範囲と検知範囲とを同一にし、走査範囲を変更するだけで電波軸を容易に精度良く調整でき、また電波反射体を検知するのに、無駄な時間を費やすことなく車載用レーダの電波軸を調整することができる。
【解決手段】この発明の車載用レーダの電波軸調整装置では、車載用レーダ2は、電波を生成するレーダ部11と、電波を送受信するアンテナ12aを有するとともに電波の送受信方向を変更させて走査範囲を形成する走査手段12と、反射電波の受信電界強度から電波反射体3の方向を算出する信号処理手段13と、この信号処理手段13により算出した電波反射体3の方向に基づいて前記走査範囲を車両進行軸4側に角度変更させて、車載用レーダ2の電波軸5を車両進行軸4に一致させる走査範囲変更手段14とを備えている。
(もっと読む)
2周波CWレーダ
【課題】2周波CWレーダと回転支持機構との結合態様を工夫して、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現する。
【解決手段】同一方向を向いた送信アンテナ34及び受信アンテナ35と、周波数f1,f2の異なる連続波をアンテナ34から空中へ出射する送信部31〜33と、アンテナ35で受信した反射波からドップラー低周波信号fd1,fd2 を検出する受信部36〜37と、その低周波信号から位相差Δφを検出して反射物までの距離Rを算出する信号処理部61と、アンテナ34,35を搭載して軸回転する回転支持機構63とを備え、その搭載がアンテナ34の出射中心線67と回転支持機構63の回転軸42とをねじれの位置の直線にする状態でなされる。
(もっと読む)
降雨強度と雨水量の3次元分布推定装置および方法
【課題】降雨強度及び雨水量の3次元分布の推定精度を高める。
【解決手段】マルチパラメータレーダにより得られる比偏波間位相差KDP、反射因子差ZDR、反射因子ZH に基づき降雨強度の推定式、雨水量の推定式を用い、地上付近の気温t0 、観測仰角θ、標準大気の気温減率Γ(=0.065℃/m)よりレンジ方向の温度プロファイルt(r,θ)を計算し、温度依存性と仰角依存性を考慮した各前記推定式の係数とべき指数ai (i=1,2)、ai'(i=1,2)、bi (i=1,2)、bi'(i=1,2)、ci (i=1,2,3)、ci'(i=1,2,3)、di (i=1,2,3)、di'(i=1,2,3)を用いて降雨強度と雨水量の3次元分布を推定する。
(もっと読む)
車載用レーダ
【課題】広い角度範囲での対象物検知に対して高速の信号処理が可能な車載用レーダを提供すること。
【解決手段】車載用レーダは、電磁波を放射する送信アンテナ1と、対象物によって反射された上記電磁波を受信する2個の受信アンテナ2a,2bと、送信アンテナと2個の受信アンテナとが面上に配置されたアンテナ板3とを備える。更に、2個の受信アンテナが並ぶ方向を方位方向としたときに、方位方向にアンテナ板を回転することによって2個の受信アンテナにより形成される検知角を走査する駆動部4を備える。駆動部は、走査と走査の間に回転を停止する静止時間を設ける。車載用レーダは、更に、2個の受信アンテナから出力される受信信号と静止中のアンテナ板の回転角とから、静止時間において対象物の基準方向に対する方位角を検出する信号処理部13を備える。
(もっと読む)
ロボットの走行軌道制御システム
【課題】 ロボットの移動方向を定める上で必要な情報を、ICタグから確実に取得することができる走行軌道制御システムを提供する。
【解決手段】 放射方向に向いた複数のICタグで構成される移動標識モジュールと、走行機能を備えたロボットとからなり、移動標識モジュールをロボットの移動空間内の床、天井、壁、備品、障害物等の物体に取り付けて、移動標識モジュールのICタグに記憶された情報を、いずれの方向からでもロボットが読み取ってロボットが取得した情報に基づいて自律移動するようにする。
(もっと読む)
車両の走行制御装置
【課題】 自車の前方に存在する複数の物体が不適切に統合されるのを防止して車両制御を的確に行えるようにする。
【解決手段】 レーダー装置で自車Vaの前方の物体T1…を検知し、所定範囲内に存在する複数の物体T1〜T5を統合して大型車両Vbに対応する目標物体Taとする。目標物体Taの代表位置から3m以上前方に離れており、かつ代表位置の左端点から0.8m以上左方(推定軌跡に近づく方向)に離れており、かつ自車Vaから前方50m以内にあり、かつ自車Vaの推定軌跡内に含まれる領域に物体T5が存在すれば、その物体T5を小型車両Vcに対応する目標物体Tbとして元の目標物体Taから分離する。そして目標物体Tbに基づいて自車Vaの走行状態を制御することにより、自車Vaの推定軌跡内に存在する小型車両Vcに対して適切に制御できる。
(もっと読む)
方位分解能を高めるビーム形状
【課題】高い方位分解能をもち、死角を検知しうるレーダーシステムを提供する。
【解決手段】車両用レーダーシステムが、ビーム形成回路とビーム合成回路とを備えるようにする。ビーム形成回路は、複数のビームポートに、複数のアンテナビームを与える。ビーム合成回路は、ビーム形成回路から複数のアンテナビームを受け取り、これらのアンテナビームを合成して、所望の数のアンテナビームを作り出す。ビーム合成回路がつくり出す所望の数のアンテナビームにおいては、両端の第1および第2のビームの各ビーム幅が、中間のビームのそれよりも狭い。
(もっと読む)
環境評価用赤外線画像作成装置及び環境評価用赤外線画像作成方法、環境評価用レーダ検出結果作成装置及び環境評価用レーダ検出結果作成方法、道路環境評価用データ作成装置及び道路環境評価用データ作成方法
【課題】 複雑な物体が存在する道路環境であっても、正確に物体や風景の存在を赤外画像等によって仮想的に表現する。
【解決手段】
仮想的な道路環境評価用赤外画像を作成するに際し、道路環境に存在しうる物体ごとに、物体の形状、物体から放射される赤外エネルギ及び物体の材質に応じた放射率を記述した物体データベースから読み出し処理を行って物体を配置して道路環境を構築すると共に(S1)、当該道路環境内における赤外画像の撮像面を定義し(S2)、構築された道路環境の大気状態に応じた赤外エネルギの減衰率を算出し(S3,S4)、算出された赤外エネルギの減衰率、撮像面に対する各物体の角度及び距離、各物体の赤外エネルギ及び放射率に基づいて、各物体の赤外エネルギが、赤外画像の撮像面の各画素に達する赤外エネルギを算出して(S5)、当該各画素の赤外エネルギの値を画素値に透視変換して(S6)、赤外画像を作成する(S7)。
(もっと読む)
干渉型レーダー
【課題】一般のレーダーと異なり、送信信号はパルスではなく、CWまたはFMCW信号であるため、レーダー用ではない一般通信用の送信モジュールを使用することができる。
【解決手段】目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する受信部Rとを有している。前記送信部Tは、目標対象物の方位及び速度を検出するためのCW信号を送信アンテナ7から出力する。前記受信部Rは、前記送信部Tからの送信と同時に、目標対象物で反射した反射波を複数台の受信アンテナ8で受信し、受信信号に対してスペクトル解析を行い速度成分ごとの受信信号に分類する機能と、受信アンテナ系統の信号間の相関する機能と、前記相関処理された信号を積分する機能と、受信アンテナ間の信号の位相差からアンテナ面に入射する信号の位相面を求めて、その出力を2次元FFTしてターゲットの方位方向及び速度を計測する機能とを実行する。
(もっと読む)
レーダアレイを較正するシステム及び技法
複数のレーダを較正するシステム及び技法が、複数の物標からのモノスタティックエコーリターンから導出される1組の連立方程式を提供する。連立方程式の解が、複数のレーダに関連する相対位置較正係数及び時間遅延較正係数を提供する。相対位置較正係数及び時間遅延較正係数により、複数のレーダを、理想的なコヒーレント処理利得と比較してごく少量の処理利得損失でコヒーレントに結合することができる。 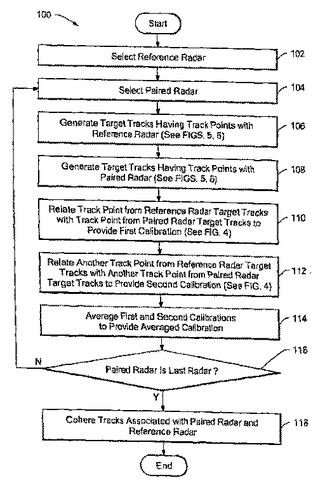 (もっと読む)
(もっと読む)
障害物検知装置
障害物検知装置は、所定の広がり角を有するビームを複数の異なる方位に向けて順次的に放射し、各方位における障害物からの反射波を受信することにより、各方位についてビームの放射角度範囲内に存在する障害物を検知する障害物検知部(11)と、障害物検知部から出力される各方位についての反射波の受信信号に基づいて、それぞれの方位における障害物と自車両との間を代表する距離を算出する距離算出部(12)と、距離算出部で算出された各方位についての距離を画像作成基準として扱うことにより、各方位に放射されたビームの放射角度範囲内において2次元的に展開された図形を障害物画像として作成し、当該障害物画像を表示するための画像データを生成して出力する障害物画像作成部(14)と、障害物画像作成部によって作成された画像データを受け取り、障害物と自車両との位置関係を示す画像を表示する表示部(15)とを備える。  (もっと読む)
(もっと読む)
車載用画像処理装置
【課題】 車外監視手段としてのレーダ2とカメラ1を有する車載システムにおいて、カメラ1により得られた画像における画像処理すべき領域(画像処理エリア)を、レーダ2の測定結果に基づいて適切に設定できる車載用画像処理装置であって、分解能の高いレーダを必要としない車載用画像処理装置を提供する。
【解決手段】 レーダ2によって検出された物体の測定位置に応じて、前記画像処理エリアの中心位置を決定し、レーダ2から出力される電磁波のビームプロファイルに応じて、前記画像処理エリアの大きさを決定する画像処理装置3を設ける。
(もっと読む)
道路鋲
【課題】 簡易な構成で実現することが可能な道路鋲を提供する。
【解決手段】 本発明は、道路に設置されるための道路鋲である。道路鋲は、検知部と、判定部と、警告出力部とを備えている。検知部は、車両に搭載される車載レーダから出射されたレーダビームを検知する。判定部は、検知部による検知結果に基づいて、自機に近づく車両が存在するか否かを判定する。警告出力部は、判定部によって自機に近づく車両が存在すると判定された場合、音または光で警告を発する。
(もっと読む)
測距システム、及び測距方法
【課題】 距離測定の精度を向上させることができるRTT方式の測距システム、及びこのような測距システムに利用される測距方法を提供する。
【解決手段】 無線信号を互いに送受信するアクセス端末と送受信端末とを備えた測距システムにおいて、応答信号の送信を要求する要求信号を送信し、要求信号が送信されてから応答信号が受信されるまでの時間を測定し、その測定された時間に基づき送受信端末までの距離を算出するアクセス端末と、アンテナ301により受信された無線信号から中間周波数信号を生成するRFIF変換部304と、その中間周波数信号の信号レベルを検出する受信信号強度計測部307と、その検出された信号レベルに基づいて応答信号をアンテナ301から送信する応答送信制御部312とを備えた。
(もっと読む)
特定エリアを検出対象とするレーダ
【課題】 特定エリアを検出対象とするレーダの検出処理速度を向上させる。
【解決手段】 対象物に反射した反射波を受信してビート信号を生成するレーダ受信部201と、ビート信号から検出エリア103以外の信号を除外するフィルタ部202と、フィルタ処理されたビート信号をデジタル化するA/D変換部203と、デジタル化されたビート信号に対してFFT処理を行なうFFT処理部204と、FFTデータから対象物の距離や相対速度等を検出する車両検出部205と、を少なくとも備えるFM−CW方式のレーダを提供する。
(もっと読む)
821 - 840 / 873
[ Back to top ]