
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
841 - 860 / 873
物標検知装置及び物標検知システム
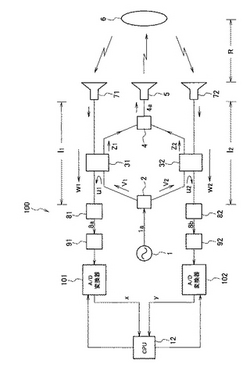
【課題】 従来の車両検知装置より小型で破損から保護することができる物標検知装置を提供する。
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供する。
【解決手段】 マイクロ波発振器1で発生するマイクロ波信号1aを第1及び第2の基準信号u1,u2と第3の送信信号4aとに分け、第3の送信信号4aを物標6に対して照射し、物標6で反射された第1及び第2の受信信号w1,w2と第1及び第2の基準信号u1,u2を第1及び第2の検波器81,82に入力して第1及び第2の検波信号8a,8bを得る。そして、第1及び第2のA/D変換器で検波信号8a,8bをA/D変換して得られた検波データx,yを演算処理して物標6の有無を判定する。また、物標検知装置2台を使用して、それぞれの物標検知装置から出力される信号ベクトルの位相差の正負により物標6の方向を判定する。
(もっと読む)
無線タグ位置検知システム、無線タグ位置検知装置及び無線タグ

【課題】
本願発明の無線タグ位置検知システムは、少なくとも1台の無線タグ位置検知装置で1以上の無線タグの方向と距離から無線タグの位置を検出することを目的とする。
【解決手段】
本発明に係る無線タグ位置検知システムは、1以上の無線タグ位置検知装置及び1以上の無線タグを有しており、無線タグ位置検知装置は、無線タグサーチ信号を無線送信するデータ送信手段と、無線タグの方向を検知する受信信号方向検知手段と、無線タイミング信号を無線送信するタイミング送信手段と、無線タグまでの伝搬往復時間を測定する時間間隔測定手段と、無線タグまでの伝搬往復時間から無線タグの位置座標を求める位置座標解析手段と、を備え、無線タグは、自己のIDを確認するID受信手段と、IDを確認すると無線応答信号を無線送信する応答信号送信手段と、無線タイミング信号を無線折り返しタイミング信号として折り返すタイミング信号折り返し手段と、を備える。
(もっと読む)
障害物検出装置
【課題】路面反射板や路面上方構造物を障害物として判断しない障害物検出装置を提供すること。
【解決手段】先行車両検出装置13において、上方照射波30と下方照射波31とは一部重なり合いを生じるように照射波を照射して、上方照射波30と下方照射波31とのそれぞれの反射波強度から照射波が反射した物体の種類を判定するようにした。
(もっと読む)
レーダ装置
【課題】 角度分解能、及びターゲット識別数に優れたレーダ装置を提供する。
【解決手段】 アンテナ素子A0〜ANA−1からなるリニアアレーアンテナの最外縁のアンテナ素子A0およびANA−1をスイッチ16で切り換えることで交互に送信アンテナとし、残りのアンテナ素子をスイッチ20で時分割的に受信アンテナとする。これにより、実効開口が物理開口の約2倍に拡大され、到来方向推定部26における角度分解能が改善される。
(もっと読む)
レーダ装置
【課題】同一ビーム内に複数目標が存在する状況において、角度検出誤差を少なくかつ効率的に目標方向の角度を得る。
【解決手段】目標13からの反射信号はアレーアンテナ14を介し受信部15で受信され、FFT16−1〜16−nで周波数解析される。そして、目標信号は、マルチビーム検出手段18および高分解能処理器19に供給される。マルチビーム検出手段18で形成されたビームにおけるピークをピーク検出手段20が検出し、その信号を高分解能処理器19に供給する。高分解能処理器19は、ピークの周辺について、高分解能処理を行うので、計算量を少なくして、高分解能処理を行うことができる。
(もっと読む)
車載用信号処理装置及び車載用レーダ装置
【課題】外筐体に設けられる外部接続コネクタと内部回路とを接続する伝送線を磁気シールドしつつ、外部接続コネクタを内部回路の位置に規制されることなく、自由に設置できるようにする。
【解決手段】外筐体60は、外筐体本体61と、その内周面に施されているシールド層62とを有して構成されている。内部回路からの伝送線73は、外筐体60のシールド層62の外周側を、このシールド層62に沿って所望の位置迄伸び、そこに外部接続コネクタ70が設けられている。
(もっと読む)
移動体の周囲物体検出装置及び移動体の周囲物体検出方法
【課題】検出精度を向上させることのできる移動体の周囲物体検出装置及び方法を提供する。
【解決手段】複数の検出手段X(i),X(i+1)・・を有し、各検出手段は、自車両の周囲に存在する物体を検出するセンサ部13と、センサ部13で検出された物体と自車両との間の相対位置データを求める位置算出手段14と、センサ部13の検出データに基づいて、自車両と物体との間の相対位置データの確信度データを求める確信度演算手段15とを有する。そして、各検出手段で求められた確信度データに基づいて、この検出手段で求められた相対位置データを重み付け処理し、重み付け処理された各相対位置データに基づいて、自車両と物体との相対位置を求める統合座標算出手段11を備えたことを特徴とする。
(もっと読む)
測高レーダ装置とその測角処理方法
【課題】 マルチパスによる測高精度の劣化を低減し、目標検出率を向上させる。
【解決手段】 仰角方向に連続した複数のビーム#1〜#3で目標を検出する場合、マルチパスの影響を受けた下側ビームの受信感度が最大となっている場合でも、他のビームでは正しい測角結果を出力している事象が多く得られることに着目し、仰角方向に受信強度分布に谷ができた目標要素をクラッタとして棄却するのではなく、下側ビーム#1以外で受信強度が最大となったビーム#3の測角値を採用する。これにより、マルチパスの影響を受けた場合でも、検出率を下げることなく測高精度の劣化を低減することが可能となる。
(もっと読む)
無線タグ探索装置
【課題】 発光素子を備えていない無線タグの読取エリア内の位置を迅速に探し出せるようにする。
【解決手段】 操作パネル2と、表示器3と、送信アンテナ4と、無指向性受信アンテナ5と、左指向性受信アンテナ6Lと、右指向性受信アンテナ6Rとを備えた携帯型の装置である。無指向性受信アンテナ5が無線タグ4からの応答電波を検出したことに基づいて左指向性受信アンテナ6L及び右指向性受信アンテナ6Rの受信信号のレベルを検出し、それらのレベル差に基づいて、無線タグからの応答電波の到来方向を判定し、表示器3に矢印A1〜A3により「左」、「中央」、「右」を表示する。
(もっと読む)
信号分類装置
【課題】送信源の電波放射停止後に発生する分類の誤りを防止する信号分類装置を得る。
【解決手段】仮説選択手段50からの仮説と信号検出手段10からの信号の時刻情報に基づき電波放射停止と判断された送信源を含む仮説と修正不要仮説を出力する送信停止判断手段60、電波放射停止と判断された送信源に分類されている信号がノイズとして判断された送信源を含む仮説と修正不要仮説を出力するノイズ判断手段70、ノイズと判断された信号をノイズとして分類し直す仮説の修正と評価値を再算出して仮説に付加し修正済仮説として出力する修正手段80、修正済仮説と同一内容の修正済仮説がある場合1つの修正済仮説を残して残りを破棄し、ない場合そのまま出力する修正仮説統合手段90、修正不要仮説と同一内容の修正済仮説がある場合はその修正済仮説を破棄し、残った修正済仮説と全ての修正不要仮説を仮説生成手段20に出力する仮説統合手段100を備える。
(もっと読む)
車載用電波式レーダ装置及びその製造方法
【課題】外筐体に設けられる外部接続コネクタと内部回路とを接続する伝送線を磁気シールドしつつ、外部接続コネクタを内部回路の位置に規制されることなく、自由に設置できるようにする。
【解決手段】外筐体60は、外筐体本体61と、その内周面に施されているシールド層62とを有して構成されている。内部回路からの伝送線73は、外筐体60のシールド層62の外周側を、このシールド層62に沿って所望の位置迄伸び、そこに外部接続コネクタ70が設けられている。
(もっと読む)
センサシステムの作動方法および作動装置
センサシステムの作動方法および装置を提示する。ここでは処理ユニットはセンサシステムの少なくとも1つのセンサと、通信接続手段を介して接続されている。さらにこの処理ユニットは少なくとも1つのセンサにデータを伝送する。このデータは、センサの少なくとも1つの検出領域および/または探知領域、および/またはセンサのモードを制御するための制御データをあらわす。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 位相モノパルス方式でターゲットの方位を決定するFM−CWレーダ装置において、マルチターゲットによる異常値を検出する。
【解決手段】 3本の受信アンテナを5λ/4および6λ/4の間隔で配置し、間隔5λ/4の受信アンテナの組み合わせから得られる方位と間隔6λ/4の受信アンテナの組み合わせから得られる方位との差が所定値未満であるかを判定し(ステップ1000)、それがn回連続するとき正常と判定する(ステップ1004)。n回連続していない時または方位の差が所定値以上であるときマルチターゲットによる異常値と判定する(ステップ1006)。
(もっと読む)
受信信号波の自動追尾装置
【課題】簡素な回路構成で高精度な角度誤差電圧を出力することができる測定精度の高い受信信号波の自動追尾装置を実現する。
【解決手段】複数の角度情報信号を出力するアンテナ1、角度情報信号をアンテナ1の角度誤差電圧に変換して出力する追尾受信機99を備え、追尾受信機99は、複数の角度情報信号の一つを交互に選択するスイッチ2と、スイッチ2を介した角度情報信号の出力信号レベルを制御する利得可変電力増幅器6と、利得可変電力増幅器6から出力される角度情報信号から複数の角度情報信号の位相差を検出して角度誤差電圧を出力する位相検出回路8と、利得可変電力増幅器6の利得を制御する自動利得制御回路9と、スイッチ2を制御する制御回路22と、各角度情報信号毎の利得制御データを保持し、制御回路22の制御動作に同期して各角度情報信号の処理に対応して利得制御データを自動利得制御回路9に出力する利得データ保持回路21とを備えた。
(もっと読む)
距離画像センサの較正方法
【課題】電磁波を用いた車載用距離センサの位置あわせに関して、少なくとも部分的な較正を高精度に行う方法を提供する。
【解決手段】少なくとも1つの走査エリアに沿って検出レンジを走査することが可能であり、かつ走査エリア又は距離画像センサの車両に対する位置合わせに関して対応する距離画像を検出することが可能であるような、車両上に取り付けられる電磁放射線用距離画像センサを少なくとも部分的に較正するための方法であって、上記距離画像センサと少なくとも1つの較正面上の領域との距離を前記距離画像センサによって求め、前記位置合わせを少なくとも部分的に記述するパラメータ(特にピッチ角である方向性)の値を求められた距離を使用して決定する方法。また、同時にビデオ画像の較正を距離センサの較正結果を考慮して行い、較正機能部の位置座標によって距離センサ検出結果のビデオカメラ上への画像化が行われる。
(もっと読む)
レーダ装置およびレーダ信号処理方法
【課題】目標速度によって方位角誤差が変化することなく、並走する目標などにおいても誤検知を防止することのできるレーダ装置およびレーダ信号処理方法を得る。
【解決手段】アンテナ方向制御部113は、アップフェーズにおける観測時とダウンフェーズにおける観測時で電波ビームの方向が異なるようにアンテナ106を向ける。
信号処理部112内の方位角算出手段は、アップフェーズにおける方位角とダウンフェーズにおける方位角を算出し、信号処理部112内の方位角判定手段は、アップフェーズにおける方位角とダウンフェーズにおける方位角の差の大きさから検知目標に関する観測データの出力内容を選択する。
(もっと読む)
車載レーダアンテナ用整列装置
車輌(14)のフレーム(2)に対するレーダアンテナ(16)の放射方向(D)を確立するための整列装置(4)および方法が開示してある。この整列装置は、このフレームの縦方向と垂直に配置し且つこのフレームに固定してあり、およびたこのアンテナの放射方向(D)がディスプレイスクリーン(20)に向くように配置してあるディスプレイスクリーンを含む。信号(26、27)をこのスクリーンの方へ、このアンテナの放射方向Dと実質的に同じ方向に向けて送ることにより、この車輌の移動方向(B)に対するアンテナの放射方向を、フレームの位置に対する車輌駆動軸(8)の位置に基づいて、および信号がこのスクリーンに当る点(30)に基づいて確立することを可能にする。  (もっと読む)
(もっと読む)
レーダ装置、及び該レーダ装置を備えた車両制御装置
【課題】 アンテナに付着する異物の存在を容易かつ正確に判定するレーダ装置、及び該レーダ装置を備えて適切な車両制御を実行する車両制御装置を提供する。
【解決手段】 送信IC2を用いて送信アンテナ1から送信波を送信すると共に、物体により反射された送信波の反射波を受信アンテナ3a〜3i及び受信IC4a〜4iにより受信し、信号処理部5で物体までの距離または方位を検出するレーダ装置において、受信アンテナ3a〜3iが、それぞれ略同一の受信特性及び略同一方向の指向性を有すると共に所定の間隔で並べられた受信アンテナを備えたアレイアンテナである時に、受信信号レベル検出手段により複数の受信アンテナで受信された受信信号レベルを検出し、異物付着判定手段により、複数の受信アンテナ間の受信信号レベルのばらつき、あるいはレベル差が所定値以上の場合には、受信アンテナ3a〜3iの前面に異物が付着していると判定する。
(もっと読む)
物標検出装置
【課題】 割り込み物標を高速に検知することが可能な物標検出装置を提供することを目的とする。
【解決手段】 この物標検出装置は、遠距離狭角検出範囲R1を有する第1レーダ100aと、遠距離狭角検出範囲R1に部分的に重複する近距離広角検出範囲R2を有する第2レーダ100bとを備えている。範囲設定手段としてのレーダ100aは、近距離広角検出範囲R2であって且つ遠距離狭角検出範囲R1でない非重複検出範囲R2a内において、第2レーダ100bの出力のノイズレベルが上昇した場合には、このノイズレベル上昇した検出範囲R2aに隣接する遠距離狭角検出範囲R1内の領域Rxを重点的検出範囲に設定して物標検出を行う。
(もっと読む)
レーダ装置の校正方法、レーダ装置、監視システム、プログラム
【課題】 監視対象の交通路における列車の運行規制や道路の通行規制を行うことなく、簡便かつ低コストかつ短期間に校正作業を行う。
【解決手段】 鉄道50と道路60が交差する踏切51を監視する複数のレーダ装置10を設置する際に、鉄道50を走行する列車52の移動軌跡を個々のレーダ装置10にて実測することで鉄道50の位置を認識し、レーダ装置10のローカル座標系10aにて測定された障害物の測定データを、鉄道50の側の交通路座標系50aに変換するための変換マトリックス71を生成する校正処理を個々のレーダ装置10の内部で自律的に行う。校正用のリフレクタ等の標的を踏切51内に置くために鉄道50を運行規制する必要がなく、また、レーダ装置10の設置数が増えても校正作業の工数や期間が増加することもなく、簡便かつ低コストかつ短期間に校正作業を行うことができる。
(もっと読む)
841 - 860 / 873
[ Back to top ]