
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
801 - 820 / 873
少素子アンテナアレイを有する測位システム
測位システムの一実施形態では、送信素子は、搬送波信号周波数を有する少なくとも1つの電磁パルスを送信するように構成されている。複数の受信素子を有するアンテナアレイは、半波長よりも大きな間隔だけ隔てられている少なくとも2つの受信素子を含む。少なくとも2つの受信素子のそれぞれは、所定期間にわたってリターン信号を受信するように構成されている。リターン信号は、システムの検出エリア内の物体からのリターンパルスを含む。波長は、送信パルスの搬送波信号周波数に対応する。検出器は、少なくとも2つの受信素子のそれぞれで受信されたリターンパルスを分離するように一方の受信素子及び他方の受信素子からのリターン信号を処理し、それによって、システムに対する物体の位置を求めるように構成されている。  (もっと読む)
(もっと読む)
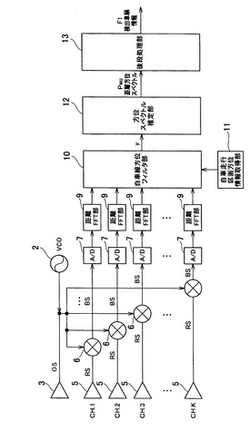
車載用レーダ装置
【課題】 走行区画に存在する目標物を精度良く検出することの出来る車載用レーダ装置の提供
【解決手段】自車両15前方に向けて扇形の走査範囲RGに渡り送信信号OSを一定の送信周期で電磁波として放射する送信アンテナ3、放射された電磁波が目標物で反射された反射波を受信して受信信号RSを出力する複数の受信用アンテナ5、受信信号と送信信号から周波数複素振幅スペクトルを演算するスペクトル演算手段9、自車両の進行方向RDを演算取得する進行方向演算取得手段11、取得された進行方向に基づいて、周波数複素振幅スペクトルの、進行方向に対応する方向成分を演算抽出しその演算結果データを出力する進行方向成分抽出手段10、演算結果データに基づいて自車両の距離方位スペクトルを演算する距離方位スペクトル演算手段12、演算された距離方位スペクトルに基づいて、自車両の前方の目標物を検出する目標物検出部13を有して構成される。
(もっと読む)
レーダの軸ずれ量決定装置

【課題】 静止物標の分布に基づくレーダの水平方向軸ずれ量決定において、直線走行からカーブ走行に移行する際にも正確に軸ずれ量を決定する。
【解決手段】 検出された静止物標の2次元的な分布のデータおよび直線走行かカーブ走行かを示すフラグを現在から所定時間前まで時系列的に保持することによって(ステップ1002〜1018)、所定時間前の分布データおよびフラグをそれぞれT_Map(4)およびT_Flag(4)として保持する。現在および所定時間前のいずれにおいても直線走行していたと判定されるときのみ(ステップ1020)所定時間前の分布データT_Map(4)をA_Mapに積算し(ステップ1022)、積算値A_Mapに基いて軸ずれ量を演算する(ステップ1026)。
(もっと読む)
電子走査型ミリ波レーダ装置およびコンピュータプログラム
【課題】 到来波に不要な成分を含む場合においても、この不要成分を効果的に除去する電子走査型ミリ波レーダ装置を提供する。
【解決手段】 デジタル化されたビート信号をフーリエ変換し、これに基づいて所定のピッチ角度でビーム信号を生成する。次に、生成されたビーム信号から対象物の方位、距離を検出する。一方、フーリエ変換された各ビート信号から不要な信号成分を除去し、この信号を逆フーリエ変換する。そして、逆フーリエ変換された各ビート信号から対象物の方位および距離に基づいて、ビート信号に対し分離処理を行う。
(もっと読む)
レーダ装置
【課題】 より安価な装置コストで実現でき、時間的誤差を低減して正確なデジタルビームフォーミング処理を行い得るレーダ装置を提供する。
【解決手段】 送信波を送信する送信系Txと、送信波の反射波を受信する5個の受信系Rx1〜Rx5と、送信波の送信信号と受信波の受信信号とを混合処理した信号について、所定タイミングでサンプリングして所定期間そのサンプリングしたレベルに固定するサンプルホールド回路109−1〜109−5と、該サンプルホールド回路109−1〜109−5の出力を順次デジタル信号に変換する切り替え器110およびA/D変換器111と、サンプリングタイミングを決定し、A/D変換器111の出力に基づきデジタルビームフォーミング処理を行う信号処理装置112と、を備えて構成する。
(もっと読む)
撮影制御装置、撮影制御方法および撮影制御プログラム
【課題】 高速で移動する移動体(航空機)を自動で追尾撮影することを目的とする。
【解決手段】 管制装置30においてレーダーデータ処理装置32は、レーダー装置20が取得した航空機のレーダーデータを入力し、航空機の位置(緯度、経度、高度)や航空機の移動状態(方位、速度、加速度)を示すデータを取得する。カメラ制御装置35は、撮影装置10が実際に航空機を撮影する時刻とその時刻における航空機の位置とを入力データに基づいて特定する。このとき、カメラ制御装置35はカメラ制御装置35の処理時間、撮影装置10を制御するデータの伝送時間、撮影装置10の駆動時間、遮蔽物の存在、カメラ11の駆動範囲等に基づき撮影装置10が実際に航空機を撮影する時刻を特定する。また、航空機の移動状態に基づいてその時刻における航空機の位置を特定する。そして、特定した時刻において特定した位置を撮影するように撮影装置10を制御する。
(もっと読む)
レーダ装置および送受信回路
【課題】過大入力に起因する受信系高周波増幅器の寿命劣化や破損を防止することができる送受信回路を得る。
【解決手段】送信信号を生成出力する送信部20と、送信信号を電波として空間に放射する送信アンテナ11と電波が目標物に到達して目標物から反射された電波を受信する受信アンテナ12とを具備するアンテナ部10と、受信アンテナから出力された受信信号が所定の周波数帯にダウンコンバートされたアナログ信号をディジタル信号に変換して出力する受信部30と、受信部30に入力される入力信号の入力レベルを監視する入力信号監視部40と、入力信号監視部40の出力信号に基づいて受信部30への入力信号を遮断または減衰させるための信号処理部(制御手段)50とを備える。
(もっと読む)
アンテナ予報値作成プログラム
【課題】 無駄な逆回転が生じることのない追尾装置用のアンテナ予報値をコンピュータに作成させるアンテナ予報値作成プログラムを提供することを目的とする。
【解決手段】 正回転又は負回転により方位角を制御可能な追尾装置20用のアンテナ予報値を作成するコンピュータ10に、供給されたアンテナ予報値の示す方位角存在範囲が追尾装置20の駆動制限にかかるか否かを判定する判定ステップと、アンテナ予報値の示す方位角存在範囲のうち、駆動制限にかかる方位角存在範囲を逆回転の方位角に変換する変換ステップとを実行させることにより上記課題を解決する。
(もっと読む)
目標追尾装置
【課題】 広範囲のエリアから目標を精度よく探知して追尾することができる目標追尾装置を得ることを目的とする。
【解決手段】 衛星画像データ受信部2により受信された画像データを分析して、赤外線画像に含まれている目標を検出する画像データ分析部3と、受信信号処理部5より出力されたレーダ受信データから目標を検出する目標検出部6と、その画像データ分析部3の検出結果と目標検出部6の検出結果との相関を求め、相関関係が強い目標を統合するセンサ情報統合部7とを設け、そのセンサ情報統合部7により統合された目標に応じて電波送受信部4のビーム方向を制御する。
(もっと読む)
アクティブな防御デバイスならびに関連する装置、システム、および方法
軌道を有する侵入する脅威に対抗して、迎撃ゾーンの中で該脅威を迎撃することによって、関連するプラットフォームを防御するように適合される迎撃デバイスが提供される。このような迎撃デバイスは、軸を規定するハウジングおよびハウジングと動作可能に係合されるカウンタメジャデバイスを備える。少なくとも1つの爆薬がハウジングによって収容され、カウンタメジャデバイスと動作可能に係合される。制御器デバイスが少なくとも1つの爆薬と通信し、制御器デバイスはハウジングによって収容され、少なくとも1つの爆薬に、ハウジングの軸に関して少なくとも部分的な半径方向外側に脅威の軌道に対応してカウンタメジャデバイスを展開させ、それによってカウンタメジャをして迎撃ゾーンの中で脅威に衝撃を与えるように構成される。また、関連する装置、システム、および方法が提供される。  (もっと読む)
(もっと読む)
先行車認識装置
【課題】 レーダー装置が電磁波を送信および受信する検知エリアの端部における物体の横方向位置の検知精度を簡単な演算で高める。
【解決手段】 レーダー装置は扇形の検知エリアに入った物体からの反射波の中心を物体の位置として検知する。レーダー装置の検知エリアの端部にターゲットの一部だけが入って検知された場合に、その検知位置はターゲットの中央位置であるB位置からずれたA位置になるが、ターゲットである車両の車幅の半分に相当する距離(例えば0.9m)だけ、前記A位置を横方向外側に移動させたB位置をターゲットの検知位置として算出することで、ターゲットの一部だけが検知エリアに入った場合でも、そのターゲットの横位置を正しく算出することができる。
(もっと読む)
前方物体認識装置
【課題】距離測定装置と撮像装置の両方の装置での処理が高速化し全体の処理効率が向上する前方物体認識装置を提供する。
【解決手段】前方物体認識装置は、前方を走行する車両や障害物等の物体との間の距離や方位を測定する相対位置測定装置2と、前方の画像を撮像して画像認識を行う撮像装置4とを備える。相対位置測定装置2と撮像装置4間では、相互の処理結果を遣り取りし、他方の装置から送信されてきた情報を参照して処理をする。物体認識装置8は、上記処理により認識された画像や相対位置情報に基づいて物体の種類や形状等の認識を行う。
(もっと読む)
車両用物体認識装置
【課題】路上にある道路標識等の看板を確実に識別して先行車両等の車線上の物体との距離測定が看板に影響されずに正しく行うことのできる車両用物体認識装置を提供する。
【解決手段】車両用物体認識装置は、前方を走行する先行車両や障害物等の物体との間の距離L1や方位を測定する相対位置測定装置7と、前方の画像を撮像して画像認識を行い、撮像画像に基づいて距離L2を測定する撮像装置5とを備える。
先行車両6が看板3の下方を通過する際に検知ビーム2を看板3を照射しない検知ビーム2′まで下げることにより、先行車両6までの測定距離に誤差が生じないようにする。
(もっと読む)
方位探知受信装置、目標探知システム及び信号処理方法
【課題】 複数の探知目標から周波数ホッピングによる通信波が到来する場合であっても、受信信号からその通信波を抽出して目標方位の識別を行う際の識別精度を向上させた方位探知受信装置を提供する。
【解決手段】 周波数ホッピングによる通信波を受信し、受信信号を素子アンテナ2aごとにデジタル化してデジタル受信データを生成するデジタル受信データ生成部3と、デジタルビームフォーミングに基づいてデジタル受信データを合成し、受信ビームを形成するDBF処理部4と、各受信ビームについて周波数解析を行う周波数解析部5と、周波数解析の結果に基づいて受信ビームごとにチップ検出を行い、検出チップの出現時間長及び検出チップ間の出現時間間隔に基づいて検出チップを探知目標ごとにグルーピングする検出チップ抽出部6と、同一グループに属する受信ビームごとの検出チップに基づいて目標方位を識別する目標方位識別部7により構成される。
(もっと読む)
電波到来方向推定装置及び方法
【課題】 高い相関を有する複数到来波の到来方向を精度良くかつ高速に推定することができる電波到来方向推定装置及び方法を提供する。
【解決手段】 この電波到来方向推定装置は、複数のアンテナ素子から構成されるアレーアンテナと、その各アンテナ素子を介して到来波を受信する受信機と、各受信信号から相関行列を演算する相関行列演算器22と、演算された相関行列に、適当な修正値を特定の行列要素にのみ持つ修正行列を加算する修正行列加算器24と、修正行列が加算された相関行列の逆行列を演算する逆行列演算器26と、演算された逆行列に基づいてウエイトベクトルを演算するウエイトベクトル演算器28と、演算されたウエイトベクトルを用いて角度スペクトラムを演算する角度スペクトラム演算器30と、演算された角度スペクトラムのピーク波形から到来波の到来方向を推定する到来方向推定器32と、を含む。
(もっと読む)
目標特定評価装置
【課題】目標のRCSの距離、向きによる変化から、特定結果を判定し、電波データなどでは絞り込めなかった、複数の目標の特定結果を絞り込み、確度の高い特定結果を可能とする目標特定評価装置を得る。
【解決手段】任意のシナリオに基づき複数の疑似的な目標を発生する疑似目標発生部25と、電波探知装置等の覆域を算出する覆域評価部26と、探知した目標の電波目標データ等を作成する目標探知模擬部100と、距離−RCSデータ等と目標特定結果の対応関係を格納するデータベースを作成するデータベース作成部33と、電波目標データ等をデータベースと比較・照合することにより目標を特定する目標特定部39と、特定結果を更新する特定結果評価部40と、特定結果を表示する結果表示部42と、特定結果を統計的に処理する特定結果処理部38と、特定結果の処理結果に基づきデータベースを更新するデータベース更新部43を設けた。
(もっと読む)
監視装置
【課題】 遠方に存在する船舶や障害などの物体を速やかに自動検知し、かつ、検知した物体の画像を表示すること。
【解決手段】 レーダ1により、物体の存在が検知された場合には、送光部21から発せられるレーザ光がその物体に照射されるように、送光部21及び受光部22の仰角及び回転角が制御装置3により動かされる。これにより、送光部21から発せられたレーザ光は、物体に反射され、この反射光が受光部22により撮像される。そして、受光部22により取得された画像が、レーザレーダ制御部24の画像処理装置により処理され、処理後の画像信号が制御装置3を介して表示装置4に供給される。これにより、表示装置4に受光部22により取得された画像が表示されることにより、その物体の形状などを確認することが可能となる。
(もっと読む)
レーダ装置
【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
レーダー装置及び送信ビーム制御方法
【課題】 レンジ方向に関する分解能やクラッタ抑圧性能を低下させることなく、遠距離目標及び近距離目標を効果的に監視することができるレーダー装置を提供する。
【解決手段】 レーダー波を送信し、空中線を介して移動目標による反射波を受信するレーダー装置であって、所定のパルス諸元に基づいて送信パルス信号を生成する送信パルス信号生成手段と、送信パルス信号に基づいて、送信パルス数が異なる2以上の送信ビームをレーダー波として形成する送信ビーム形成手段と、送信パルス数が異なる各送信ビームを順次に走査するビーム走査制御手段と、受信信号に基づいて送信ビームごとにビデオ信号を生成する受信手段とを備え、ビーム走査制御手段が、ビデオ信号のデータ更新周期を送信ビームごとに異ならせて各送信ビームの走査を行うように構成される。
(もっと読む)
ネットワークレーダシステム
【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
801 - 820 / 873
[ Back to top ]