
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
1,241 - 1,260 / 1,457
前方物体認識装置

【課題】距離測定装置と撮像装置の両方の装置での処理が高速化し全体の処理効率が向上する前方物体認識装置を提供する。
【解決手段】前方物体認識装置は、前方を走行する車両や障害物等の物体との間の距離や方位を測定する相対位置測定装置2と、前方の画像を撮像して画像認識を行う撮像装置4とを備える。相対位置測定装置2と撮像装置4間では、相互の処理結果を遣り取りし、他方の装置から送信されてきた情報を参照して処理をする。物体認識装置8は、上記処理により認識された画像や相対位置情報に基づいて物体の種類や形状等の認識を行う。
(もっと読む)
複数の物体の距離及び相対速度の測定のための方法及び装置

時間的に線形の周波数ランプをもつ送信信号を発射し、物体で反射した受信信号を受信して送信信号と混合することによる、FMCWレーダを用いた複数の物体の距離及び相対速度の測定のための方法及び装置。各物体についての各周波数ランプのミキサ出力周波数に対して、距離値と相対速度値との組合せが割り当てられ、距離と相対速度との複数の組合せの交点から、考えられる物体の距離及び相対速度が決定され、その際、考えられる物体は、アンビギュイティのための見せかけの物体、又は現実の物体でありうる。アンビギュイティによる見せかけの物体は、その次の測定サイクルにおいて少なくとも1つの周波数ランプの周波数勾配をランダムに変化させることによって、消去される。 (もっと読む)
レドーム
【課題】必要な周波数帯の電波を透過させつつ、優れた遮蔽性能を発揮して被探知性能の向上を可能とするレドームを提供する。
【解決手段】必要な所定の周波数帯域の電波HWは誘電体層4および周波数選択層3を透過させて、レーダアンテナを通常どおりに機能させ、必要な低周波帯域の電波LWは、第2誘電体層4bと、この層4bを挟んで対向する周波数選択層3および導体5とで構成されるマイクロストリップアンテナ6で送受信するので、周波数選択層3に送受信する低周波帯域の電波LWの逓倍波の透過窓を形成することがなく、第三者等の送信した不要な電波EWは、周波数選択層3で減衰される。
(もっと読む)
目標追尾装置
【課題】 広範囲のエリアから目標を精度よく探知して追尾することができる目標追尾装置を得ることを目的とする。
【解決手段】 衛星画像データ受信部2により受信された画像データを分析して、赤外線画像に含まれている目標を検出する画像データ分析部3と、受信信号処理部5より出力されたレーダ受信データから目標を検出する目標検出部6と、その画像データ分析部3の検出結果と目標検出部6の検出結果との相関を求め、相関関係が強い目標を統合するセンサ情報統合部7とを設け、そのセンサ情報統合部7により統合された目標に応じて電波送受信部4のビーム方向を制御する。
(もっと読む)
先行車認識装置
【課題】 レーダー装置が電磁波を送信および受信する検知エリアの端部における物体の横方向位置の検知精度を簡単な演算で高める。
【解決手段】 レーダー装置は扇形の検知エリアに入った物体からの反射波の中心を物体の位置として検知する。レーダー装置の検知エリアの端部にターゲットの一部だけが入って検知された場合に、その検知位置はターゲットの中央位置であるB位置からずれたA位置になるが、ターゲットである車両の車幅の半分に相当する距離(例えば0.9m)だけ、前記A位置を横方向外側に移動させたB位置をターゲットの検知位置として算出することで、ターゲットの一部だけが検知エリアに入った場合でも、そのターゲットの横位置を正しく算出することができる。
(もっと読む)
車両用物体認識装置
【課題】路上にある道路標識等の看板を確実に識別して先行車両等の車線上の物体との距離測定が看板に影響されずに正しく行うことのできる車両用物体認識装置を提供する。
【解決手段】車両用物体認識装置は、前方を走行する先行車両や障害物等の物体との間の距離L1や方位を測定する相対位置測定装置7と、前方の画像を撮像して画像認識を行い、撮像画像に基づいて距離L2を測定する撮像装置5とを備える。
先行車両6が看板3の下方を通過する際に検知ビーム2を看板3を照射しない検知ビーム2′まで下げることにより、先行車両6までの測定距離に誤差が生じないようにする。
(もっと読む)
評価発振器により擬似位相コヒーレントに励起可能な送信発振器を備えるレーダー
レーダーが信号の送信する送信手段と、送信された信号の反射を受信する受信手段とを有する装置であって、送信手段は送信発振器を有する。ここで受信手段は評価発振器を有し、送信発振器は評価発振器により、および/または評価発振器は送信発振器により擬似位相コヒーレントに励振可能である。 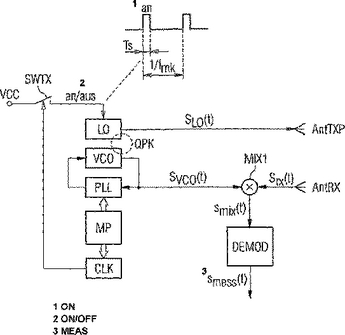 (もっと読む)
(もっと読む)
レーダ装置
【課題】 本発明は、送受信部のレーダアンテナに付着した雪、泥などの汚れに起因したアンテナ感度の低下を精度良く判定できるスキャン式レーダ装置を提供する。
【解決手段】 所定の角度で順次ビームをスキャンして送信するレーダアンテナを有し、送信されたビームが前方のターゲットから反射された反射波を該レーダアンテナで受信して、ターゲットを検出するスキャン式レーダ装置において、ターゲットからの反射波信号のレベルに基づいてアンテナ感度が低下したか否かの判断を行うが、検出されたターゲットが、例えば、オートバイ等のように、検出される幅が狭い場合、或いは、元々反射波信号レベルが低い場合には、反射波信号のレベルが低くても、アンテナ感度が低下したと判定しないようにした。
(もっと読む)
レーダ装置
【課題】レーダ装置の受信局部発振器とDC−DCコンバータ(電源部)との同期が取れていないことを検出する。
【解決手段】ターゲットに対して送信波を発射する送信部と、ターゲットからの反射波を受信するヘテロダイン方式の受信部と、受信部に電力を供給する電源部とを有するレーダ装置であって、受信部の局部発振周波数と電源部のスイッチング周波数とが同期して動作するものにおいて、送信部の送信状態の変化に対し、受信部の出力信号に同一のピーク周波数が存在する場合、局部発振周波数とスイッチング周波数の同期がはずれていると判断する。
(もっと読む)
高周波送受信器およびそれを具備するレーダ装置ならびにそれを搭載したレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 送信用高周波信号をスイッチングする過渡的な状態においてノイズを含む不要な中間周波信号が受信系に出力されるのを良好に遮断できるようにすること。
【解決手段】 高周波発振器1と分岐器2とRFスイッチ3とハイブリッド4と送受信アンテナ5とミキサー6とを設けた高周波送受信器において、ミキサー6の出力端に、開状態で中間周波信号を遮断し、送信用高周波信号RFtが非出力状態で安定したときに閉状態となって中間周波信号を通過させるIFスイッチ7を設けた高周波送受信器である。ミキサー6に混入した送信用高周波信号RFtによるノイズを含む中間周波信号がミキサー6の後段に漏れることがなく、所望の中間周波信号を出力させることができる。
(もっと読む)
車載用レーダ装置および車両搭載方法
【課題】 車載用レーダを車両等に搭載する際の調整の手間を減らすこと。
【解決手段】 送信手段2は、例えばFM等の変調をかけた送信波を作り、送信アンテナ4に供給し、送信アンテナ4よりこの送信波を発射する。バンパー6により反射した電磁波は、受信アンテナ5により受信され、受信手段3により検波される。信号処理手段10は、その検波された受信信号を用い、障害物までの距離および障害物との相対速度を算出する。レーダ装置を搭載する車両のバンパー6は、目標とする照射ポイントを中心とし、周囲の反射率を変えたものとする。反射パワー検出手段7は、バンパー6からの反射パワーを検出し、調整手段9は、この検出されたバンパー6からの反射パワーを基に、アンテナの取付け位置および角度を調整する。
(もっと読む)
車両内の座席占有状態の識別方法および装置
車両(1)内で唯一の高周波数送信ユニットにより複数の座席(2)へ放射を送信し、座席占有状態に応じて反射した高周波数放射を受信ユニットで受信し、その放射強度を評価する。さらに識別の確実性を向上させるために、座席ごとにシートベルト(6)内またはシートベルト上に少なくとも1つのリフレクタ(9)を配置する。 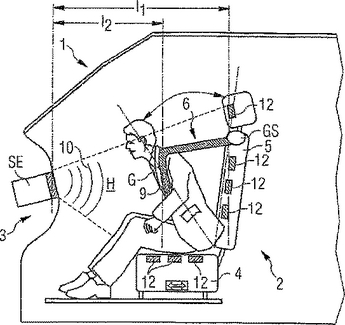 (もっと読む)
(もっと読む)
FM−CWレーダ装置および同装置のノイズ抑制方法
【課題】FM−CWレーダ装置において、複数の装置間の電波干渉によって発生するスパイク状のノイズ成分を効果的に抑止すること。
【解決手段】連続波に周波数変調を施したFM−CW信号を送信信号として用い、受信信号と送信信号との差信号であるビート信号に基づいて目標物の相対距離、相対速度および方位の1つ以上を出力するFM−CWレーダ装置において、ビート信号をディジタル変換したディジタルビート信号に含まれるスパイク状のノイズ成分を抑制するためのスパイクノイズ抑制手段が具備され、このスパイクノイズ抑制手段によって、ディジタルビート信号の時系列データ上の一のデータと当該一のデータの直前データとの差分出力データに基づいてディジタルビート信号にスパイク状のノイズ成分が含まれているか否かが判定される。
(もっと読む)
車載レーダ装置
【課題】 電波をレーダ波とするレーダ装置において、路側物の検出を精度を向上させる。
【解決手段】 信号解析処理でのFFT処理結果に基づいて生成した受信ベクトルX(k)をユニタリ変換し、そのユニタリ変換された受信ベクトルY(k)に基づき、次式を用いて、過去の受信ベクトルを反映し、且つユニタリ変換された相関行列Ryy(k)を生成する(S210〜S240)。
Ryy(k)=α・Ryy(k−1)+(1−α)・Y(k)YH(k)
この相関行列Ryy(k)に基づいて生成したMUSICスペクトラムから静止物標に対応する候補点を抽出し、この候補点と、虚像を発生させる原因となった物標に対応する重要候補点とを用いてハフ変換を行うことで、路側物の配列状態を検出する(S250〜S320)。
(もっと読む)
高周波送受信器およびそれを具備するレーダ装置ならびにそれを搭載したレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 送信用高周波信号をスイッチングする過渡的な状態においてノイズを含む不要な中間周波信号が受信系に出力されるのを良好に遮断できるようにすること。
【解決手段】 高周波発振器1と切替えRFスイッチ8’および第2の切替えRFスイッチ8”と送受信アンテナ5とミキサー6と増幅器7とを設けた高周波送受信器において、増幅器7の電源路に接続された、開状態で増幅器7の電源を遮断し、送信用高周波信号RFtが非出力状態で安定したときに閉状態となって増幅器7の電源を投入するスイッチ7a,7bとを備えている高周波送受信器である。ミキサー6に混入した送信用高周波信号RFtによるノイズを含む中間周波信号がミキサー6の後段に漏れることがなく、所望の中間周波信号を出力させることができる。
(もっと読む)
センサ異常検出装置及びセンサ異常検出方法
【課題】実走行環境下での常時検出に好適で処理負担が少ない構成により、車両に搭載した車外監視センサの外観からは判断がつきにくい軸ずれ等のセンサ異常の信頼性の高い検出を行う。
【解決手段】車両1aの測距レーダ2aが受ける衝撃を加速度センサ3によって検出し、センサ3の外観からは判断がつきにくい軸ずれ等のセンサ異常が生じる一定範囲の衝撃検出に基づき、異常判定手段により、測距レーダ2aが異常であると判定して測距レーダ2aのセンサ異常を検出し、判定結果処理手段により、前記センサ異常の検出結果を故障診断情報として保持し、警報出力する。
(もっと読む)
物体認識装置
【課題】 少ない演算量で、非検出対象のデータが混在しても安定して移動体周辺の物体の形状を認識することができ、両者の配置関係を求めて、この配置関係を良好に報知することのできる物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体を認識する物体認識装置であって、物体の表面形状情報を検出する物体検出手段1と、表面形状情報を構成する標本群から任意に抽出した標本に基づいて定めた形状モデルに対する標本群の一致度を演算して前記物体の輪郭形状を認識する形状認識手段2と、物体検出手段1及び形状認識手段2の検出及び認識結果に基づいて、移動体と物体との相対的な配置関係を演算する相対配置演算手段3と、この相対配置演算手段3の演算結果に基づいて、配置関係についてディスプレイへの表示又は音声により報知する報知手段5と、を備える。
(もっと読む)
パルスレーダ装置
【課題】 状況に応じた最適な測定範囲、および障害物の検出分解能を得ることのできるパルスレーダ装置を提供すること。
【解決手段】 クロック信号遅延分割回路2は、クロック信号発生部1によって生成されたクロック信号に基づいて、クロック信号を任意の時間だけ遅延させた1以上の遅延クロック信号を合成して成るクロック信号列を生成する。送信パルス生成部3は、クロック信号に基づいて送信パルスを生成するとともに、クロック信号遅延分割回路2で生成されたクロック信号列に基づいてレプリカパルスを生成する。相関部7は、電波受信部5によって受信される反射波とレプリカパルスとの相関演算を行う。信号処理部9は、クロック信号遅延分割回路2を制御して、クロック信号列を構成する遅延クロック信号の数、および各遅延クロック信号の遅延量を変化させる。
(もっと読む)
障害物検出装置
【課題】障害物検出装置での障害物検出処理において、演算オーバーヘッドの増大を抑制するとともに、歩行者などの障害物の誤検出や未検出の件数を効果的に削減すること。
【解決手段】 検出結果照合手段160は、距離・方位・相対速度検出手段150の検出結果と立体物検出手段110の検出結果との間で矛盾があった場合に、適応制御の実行指令を発行する制御手段を備えている。即ち、検出結果照合手段160は、その適応制御の実行指令を意味するフィードバック信号S1を検出範囲限定手段141とビーム方向・形状演算手段142に出力する。ビーム方向・形状演算手段142は、ミリ波レーダを構成する各個別アンテナの各受信信号の重み係数Am (複素数;1≦m≦M)を立体物検出手段110の検出結果に適応させて変更する。レーダービーム制御122は与えられた重み係数Am に基づいて各方向毎の探索データ(受信信号)に関する総和を生成する。
(もっと読む)
物体認識装置及び方法
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体を認識する物体認識装置であって、物体の表面形状情報を検出する物体検出手段1と、物体の輪郭形状を認識する形状認識手段2と、を備え、この形状認識手段2は、表面形状情報を構成する標本群から任意に抽出した標本に基づいて定めた形状モデルに対する標本群の一致度を演算して前記輪郭形状を認識する。
(もっと読む)
1,241 - 1,260 / 1,457
[ Back to top ]