
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
1,281 - 1,300 / 1,457
ドプラ算出装置およびレーダ装置

【課題】 目標物体に対する相対速度および接近/離反をIQ検波方式により求めるドプラ算出装置であって、これを小規模にかつ高速処理可能に実現する。
【解決手段】 ドプラ算出手段11により、目標物体からの受信信号をIQ検波して得たI−チャンネルおよびQ−チャンネル信号により定まるベクトル回転角の変化量に基づいてドプラを算出する。この場合、I−チャンネルおよびQ−チャンネル信号の各正負極性(+,−)を表す符号対の周期的な変化を検出する。そして、その変化の周期性に基づいて、相対速度(V)および接近/離反(A/R)を算出するように構成する。
(もっと読む)
車両用センサシステム及び方法

【課題】目標パラメータを効率的に決定して動作速度を上げ、計算経費を最小にし、RF放出を低減する車両検知システムの提供。
【解決手段】物体の目標パラメータを決定する方法は、(a)一連の射程距離から目標射程距離を定める工程と、(b)初期ドエル時間に目標射程距離にドエルしてセンサデータを得る工程と、(c)目標射程距離での物体の有無の確率密度分布に基づいて、センサデータが目標射程距離での物体ありに対応するか、物体なしに対応するかを決定する工程と、決定できない場合は決定できるまで工程(b)及び工程(c)を繰返し、(d)センサデータが工程(c)で決定した物体の存在に対応する場合、延長ドエル時間で目標射程距離にドエルし、工程(e)に進む前に物体の目標パラメータを決定する追加センサデータを得る工程と、(e)工程(b)〜工程(e)を繰り返す前に、目標射程距離として次の一連の射程距離を定める工程とを具備する。
(もっと読む)
物体検知センサ
【課題】
対象物の種類の違いによる検知距離のバラツキを小さくすること。
【解決手段】
所定周波数の出力信号を生成する発振器11と、発振器11にて生成された出力信号を対象物9に向けて送信する送信アンテナ13と、送信アンテナ13から送信された出力信号が対象物9にて反射した反射信号を受信する受信アンテナ14とを備え、出力信号と反射信号とを混合することでドップラー信号を生成し、ドップラー信号に基づいて対象物9を検知するドップラーセンサ10において、ドップラー信号に基づいて出力信号の対象物9での反射度合を検知するピーク判定部21と、ピーク判定部21により検知された反射度合に応じて対象物9の有無を検知する感度を調節する感度調節手段30とを備える構成としたこと。
(もっと読む)
車両の走行制御装置
【課題】 自車の前方に存在する複数の物体が不適切に統合されるのを防止して車両制御を的確に行えるようにする。
【解決手段】 レーダー装置で自車Vaの前方の物体T1…を検知し、所定範囲内に存在する複数の物体T1〜T5を統合して大型車両Vbに対応する目標物体Taとする。目標物体Taの代表位置から3m以上前方に離れており、かつ代表位置の左端点から0.8m以上左方(推定軌跡に近づく方向)に離れており、かつ自車Vaから前方50m以内にあり、かつ自車Vaの推定軌跡内に含まれる領域に物体T5が存在すれば、その物体T5を小型車両Vcに対応する目標物体Tbとして元の目標物体Taから分離する。そして目標物体Tbに基づいて自車Vaの走行状態を制御することにより、自車Vaの推定軌跡内に存在する小型車両Vcに対して適切に制御できる。
(もっと読む)
方位分解能を高めるビーム形状
【課題】高い方位分解能をもち、死角を検知しうるレーダーシステムを提供する。
【解決手段】車両用レーダーシステムが、ビーム形成回路とビーム合成回路とを備えるようにする。ビーム形成回路は、複数のビームポートに、複数のアンテナビームを与える。ビーム合成回路は、ビーム形成回路から複数のアンテナビームを受け取り、これらのアンテナビームを合成して、所望の数のアンテナビームを作り出す。ビーム合成回路がつくり出す所望の数のアンテナビームにおいては、両端の第1および第2のビームの各ビーム幅が、中間のビームのそれよりも狭い。
(もっと読む)
レーダー装置
【課題】車載用等のレーダー装置は、数十cmから数十mまでの短距離の範囲で対象物を検知する必要があることから、対象物からの反射波がレーダー装置の前面のケースにより再反射され、再度対象物によって反射され、レーダー装置で二次エコーとして受信されてしまうという問題がある。上記問題に対して、本発明は、多重反射を防止して近距離にある対象物までの距離を正確に測定することのできるレーダー装置を提供することを目的とする。
【解決手段】本願発明に係るレーダー装置は、送信用アンテナ及び受信用アンテナの周囲に設けられた枠体の表面を、送信用アンテナの送信波を放射する方向に対象物からの反射波が戻らないようにする。
(もっと読む)
物体検出装置、物体検出方法、物体検出プログラム、距離センサ
観測対象空間に存在する少なくとも1つの物体を検出する物体検出装置であって、検出対象物体の形状を表す画像である物体モデルを算出して記録する物体モデル記録部3と、一度に観測対象空間の全体をカバーするミリ波を照射し、物体候補の距離の算出を行うミリ波距離センサ1と、視点の異なる特徴画像と距離画像を算出するステレオ画像センサ2と、物体候補を選択する制御部7と、物体モデルから照合モデルを算出するモデル変換部4と、特徴画像と距離画像から照合画像を抽出する照合画像抽出部5と、照合モデルと照合画像の類似度を算出し、最大類似度が所定の範囲内となった場合、照合画像の座標と物体候補の距離から前記物体の3次元位置を算出し、前記物体の3次元位置を外部へ出力する類似度照合部6とを備えてなる。 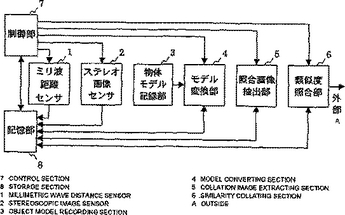 (もっと読む)
(もっと読む)
速度センサおよびそれを用いた対地車速センサ
【課題】検知誤差を低減した高精度な速度センサを実現すること。
【解決手段】センサ回路部3により電磁波を生成し送信アンテナから放射する。さらに、受信アンテナにより地面からの反射波を受信し、混合器により局部信号と混合することで低周波信号を生成する。センサ回路部3から放射された電磁波は、誘電体レンズ2によりビームを成型した後、地面に照射するが、このとき、ビーム形状4はセンサ近傍のビーム幅に対して、地面近傍のビーム幅が小さくなる形状にする。
(もっと読む)
パルスレーダ装置
【課題】近距離の検知限界が短く、距離分解能が高いパルスレーダ装置を提供する。さらに他のレーダからの干渉による誤動作を防止する。
【解決手段】送信パルス作成の基となる信号を遅延させて制御用パルス信号を生成する手段2と、制御パルス信号を用いて受信信号に対するゲート動作を行う手段3とを備える。また前述の基となる第1の信号と、第1の信号より低周波で位相変調用の第2の信号と、第1と第2の信号の中間周波数で生成される擬似ランダム信号とを用いて作成された信号を遅延させて制御パルス信号を生成する手段と、前述のゲート動作を行う手段とを備える。
(もっと読む)
パルスレーダ装置
【課題】近距離検知限界が短く、距離分解能が高く、反射信号検出用回路から発生する
ノイズの影響を受けない装置を提供する。
【解決手段】送信パルス作成の基となる第1の信号を生成する手段2と、第1の信号の
周波数と倍数、または約数の関係にある周波数を持ち、位相が0の時点が間欠的に一致す
る第2の信号を生成する手段3と、第2の信号を遅延させて制御パルス信号を生成する手
段4と、制御パルス信号を用いて受信信号に対するゲート動作を行う手段5とを備える。
(もっと読む)
パルスレーダ装置
【課題】近距離検知限界が短く、距離分解能が高く、反射信号検出用回路から発生する
ノイズの影響を受けない装置を提供する。
【解決手段】送信パルス作成の基となる第1の信号を生成する手段2と、第1の信号の
周波数と倍数、または約数の関係にある周波数を持ち、位相が0の時点が間欠的に一致す
る第2の信号を生成する手段3と、第2の信号を遅延させて制御パルス信号を生成する手
段4と、制御パルス信号を用いて受信信号に対するゲート動作を行う手段5とを備える。
(もっと読む)
パルスレーダ装置及びその距離検出方法
【課題】 本発明は、目標物からの反射信号を検知できないヌル点が発生しないホモダイン式のパルスレーダ装置を提供することを課題とする。
【解決手段】 送信高周波発振器12からの信号を高速矩形波OSC14の高速矩形波信号によってASK変換して出力する。ゲート19,21によって高速矩形波信号を遅延させたゲーティング信号とANDを取り、その出力値のレベルが最も大きいゲーティング信号の遅延時間を受信信号の遅延時間とし、この遅延時間から目標物までの距離を算出する。また低速の矩形信号を高速矩形信号に複合させることによって、他の装置からの干渉を防ぐ。
(もっと読む)
パルスレーダ装置
【課題】近距離検知限界が短く、距離分解能が高く、反射信号検出用回路から発生する
ノイズの影響を受けない装置を提供する。
【解決手段】送信パルス作成の基となる第1の信号を生成する手段2と、第1の信号の
周波数と倍数、または約数の関係にある周波数を持ち、位相が0の時点が間欠的に一致す
る第2の信号を生成する手段3と、第2の信号を遅延させて制御パルス信号を生成する手
段4と、制御パルス信号を用いて受信信号に対するゲート動作を行う手段5とを備える。
(もっと読む)
環境評価用赤外線画像作成装置及び環境評価用赤外線画像作成方法、環境評価用レーダ検出結果作成装置及び環境評価用レーダ検出結果作成方法、道路環境評価用データ作成装置及び道路環境評価用データ作成方法
【課題】 複雑な物体が存在する道路環境であっても、正確に物体や風景の存在を赤外画像等によって仮想的に表現する。
【解決手段】
仮想的な道路環境評価用赤外画像を作成するに際し、道路環境に存在しうる物体ごとに、物体の形状、物体から放射される赤外エネルギ及び物体の材質に応じた放射率を記述した物体データベースから読み出し処理を行って物体を配置して道路環境を構築すると共に(S1)、当該道路環境内における赤外画像の撮像面を定義し(S2)、構築された道路環境の大気状態に応じた赤外エネルギの減衰率を算出し(S3,S4)、算出された赤外エネルギの減衰率、撮像面に対する各物体の角度及び距離、各物体の赤外エネルギ及び放射率に基づいて、各物体の赤外エネルギが、赤外画像の撮像面の各画素に達する赤外エネルギを算出して(S5)、当該各画素の赤外エネルギの値を画素値に透視変換して(S6)、赤外画像を作成する(S7)。
(もっと読む)
レーダーの干渉信号を除去するシステムおよび方法
【課題】レーダー戻り信号における干渉信号を除去する、周波数変調連続波(FMCW)レーダー用のシステムと方法を提供する。
【解決手段】干渉信号が検知されると、直ちに干渉信号の範囲が決定され、干渉信号がレーダー戻り信号から除去されるため、レーダーは、干渉信号が存在しても、観測対象を検知することができる。このシステムと方法は、このシステムを搭載したFMCWレーダーと同一の周波数で作動する干渉レーダー源(例えばもう1つのFMCWレーダー、警察のレーダーガン、パルスレーダー等)の範囲内で使用されるFMCWレーダーにも効果をもたらす。
(もっと読む)
電磁放射を放射および/または受信するための装置および方法
電磁放射を放射および/または受信するための装置(100)および方法を発展し、該装置(100)のエレベーション方向(E)のビームローブの角度(Θ)を簡単かつ低コストで実現するため、異なるアンテナ素子(32,34,36,38)によって放射および/または受信される放射の位相シフト(Δφ)、ないしは電磁放射の放射および/または受信のエレベーション方向(E)の角度(Θ)が、
・線路(20)の実効誘電率(εeff)とりわけ伝播係数を変化させることによって調整され、および/または
・少なくとも部分的に導電性の材料から形成された少なくとも1つのエレメント(50,52,54)を、線路(20)および/またはアンテナ素子(32,34,36,38)までの間隔が変更可能であるように配置することによって調整されるように構成することが提案される。  (もっと読む)
(もっと読む)
衝突防止支援方法及び衝突防止支援装置
【課題】探索センサの出力に基く自車前方の物標の時系列の検出位置から、最小二乗法の演算によって、衝突防止の支援情報としての自車前方の物標の精度の高い進路推定が行なえるようにする。
【解決手段】物標と自車との距離、物標の自車に対する相対速度、物標の障害物らしさの認識指標、物標の自車推定進路からの遠近の少なくともいずれか1つに基いて、確度の高い検出データの前記物標検出位置ほど大きくなる重み付け係数が最小二乗法の各残差の二乗に乗算し、信頼性の高い物標検出位置程、影響を大きくして(重視して)回帰曲線の係数を求めて回帰曲線を導出し、この回帰曲線に基いて物標の相対進路を精度よく推定し、自車前方の物標の精度の高い進路推定を行なうことができる。
(もっと読む)
スキャン型レーダ装置
【課題】 本発明は、レーダ制御部における信号処理能力を増強することを不要とし、精度良く広角化を図ることができるスキャン型レーダ装置を提供する。
【解決手段】 レーダ制御部内に備えられた制御対象認識部において、物標検出処理が実行されるとき、走査機構にスキャンビームの角度を指示したとき、隣接走行レーンを含めた3車線の範囲の物標を検出する必要がある場合、各ビームのスキャンされる角度と、3車線分の走行レーン幅とから、各ビームに係る有効距離Leが演算される。各有効距離Leは制御距離Lcの大きさと比較され、LeがLcより大きい場合、当該ビームに対する検出データ数をデフォルト値に設定する。LeがLcより短い場合、検出データ数のデフォルト値に比率Le/Lcを乗算して、当該ビームに対する検出ビーム数を求め、設定する。検出ビーム数が制限された分の処理時間を広角化に使用することができる。
(もっと読む)
障害物検知装置
障害物検知装置は、所定の広がり角を有するビームを複数の異なる方位に向けて順次的に放射し、各方位における障害物からの反射波を受信することにより、各方位についてビームの放射角度範囲内に存在する障害物を検知する障害物検知部(11)と、障害物検知部から出力される各方位についての反射波の受信信号に基づいて、それぞれの方位における障害物と自車両との間を代表する距離を算出する距離算出部(12)と、距離算出部で算出された各方位についての距離を画像作成基準として扱うことにより、各方位に放射されたビームの放射角度範囲内において2次元的に展開された図形を障害物画像として作成し、当該障害物画像を表示するための画像データを生成して出力する障害物画像作成部(14)と、障害物画像作成部によって作成された画像データを受け取り、障害物と自車両との位置関係を示す画像を表示する表示部(15)とを備える。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるようにする。
【解決手段】 不等間隔に配置されている複数の素子アンテナから構成されている受信アンテナ3を用いて、目標に反射されたパルス信号を繰り返し受信する受信器の他、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9を設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて受信ビームを形成する。
(もっと読む)
1,281 - 1,300 / 1,457
[ Back to top ]