
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
1,321 - 1,340 / 1,457
物標検知装置及び物標検知システム
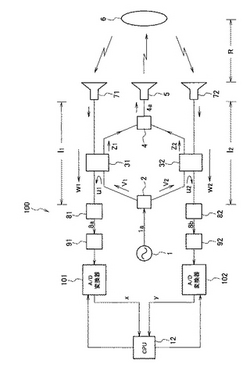
【課題】 従来の車両検知装置より小型で破損から保護することができる物標検知装置を提供する。
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供する。
【解決手段】 マイクロ波発振器1で発生するマイクロ波信号1aを第1及び第2の基準信号u1,u2と第3の送信信号4aとに分け、第3の送信信号4aを物標6に対して照射し、物標6で反射された第1及び第2の受信信号w1,w2と第1及び第2の基準信号u1,u2を第1及び第2の検波器81,82に入力して第1及び第2の検波信号8a,8bを得る。そして、第1及び第2のA/D変換器で検波信号8a,8bをA/D変換して得られた検波データx,yを演算処理して物標6の有無を判定する。また、物標検知装置2台を使用して、それぞれの物標検知装置から出力される信号ベクトルの位相差の正負により物標6の方向を判定する。
(もっと読む)
位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置

【課題】 複数の第1通信装置と第2通信装置とを通信可能とさせる中継装置の位置を検出することができる位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【解決手段】 複数の第1通信装置はそれぞれ第2通信装置との距離を算出するための距離算出用信号を送信する第1送信部と送信したときの距離算出用信号と受信したときの距離算出用信号に応じた信号との位相差を検出する検出部と当該位相差に基づいて距離を算出する算出部とを備え、第2通信装置は距離算出用信号に応じた信号を送信する第2送信部を備え、複数の算出部にて算出された複数の距離が予め定められた距離未満であるか否かを判別する判別部と、予め定められた距離以上であると判別部が判別したときの複数の距離に応じた中継装置の位置を検出する位置検出部と、を有する、ことを特徴とする。
(もっと読む)
距離算出通信装置、距離算出通信装置に用いる距離算出プログラム
【課題】 相手側通信装置との間における当事者以外による不正通信を防止するべく、相手側通信装置との距離を確実に算出することができる距離算出通信装置、距離算出通信装置に用いる距離算出プログラムを提供することを目的とする。
【解決手段】 相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、相手側通信装置から返信された距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する検出部と、検出部にて検出された位相差に基づいて、相手側通信装置との間の距離を算出する算出部と、を備えたことを特徴とする。
(もっと読む)
通信管理システム、通信管理システムの通信管理方法、通信管理装置、通信装置
【課題】 所定空間内の物体移動を検知した検知結果と第2通信装置の距離が予め定められた距離未満であるとの判別結果に基づき所定の処理を可能とする通信管理システム、通信管理システムの通信管理方法、通信管理装置、通信装置を提供することを目的とする。
【解決手段】 第1通信装置は第2通信装置との距離を算出するための距離算出用信号を送信する第1送信部と送信した当該距離算出用信号と受信した当該距離算出用信号に応じた信号との位相差を検出する検出部と位相差に基づいて第2通信装置の距離を算出する算出部とを備え、第2通信装置は距離算出用信号に応じた信号を送信する第2送信部を備え、算出した距離が予め定められた距離未満であるか否かを判別する判別部と所定空間内の物体の移動を検知するセンサを備え、センサによる検知結果と予め定められた距離未満であるときの判別結果とに基づいて所定の処理を行うことを可能とすることを特徴とする。
(もっと読む)
実体の表現方法、実体の分類方法及び分類装置、実体表現のストア(store)を確立する方法、実体の表現を生成する装置、コンピュータプログラム、並びに信号処理装置
【課題】複雑な形状の移動物標による後方散乱信号を受信し、物標の存在や分類を行う場合、アスペクト角のわずかな変化によって後方散乱信号に大きな変動を生じ、統計的推定値の誤差が非常に大きくなる。この誤差を少なくし、信頼性の高い形状記述子を得る。
【解決手段】実体に質問信号を当て、実体からの反射を繰り返しサンプリングして、反射信号の強度にそれぞれ依存する第1の組の値を得る。このサンプル値に対数変換を適用して、第2の組の値を得る。特定の算式により、第2の組の値の平均値と中央値の差を表す第1の記述子の値(L)と、第2の組の値の各々と第2の組の値の代表値との間の偏差の絶対値の平均値を表す第2の記述子の値(D)とを少なくとも含む一組の記述子を導出し、これを異なるアスペクト角において取得する。これらのデータを記憶された複数のデータ集合と比較して物標を分類する。
(もっと読む)
前方物体検出装置及び前方物体検出方法
【課題】道路構造物及び道路構造物以外の物体を正確に検出する前方物体検出装置又は前方物体検出方法を提供する。
【解決手段】
自車両の前方に出射された走査波の反射波に基づいて検出された前記物体の検出ポイントの情報を含む検出情報を取得する検出情報取得手段20と、自車両の現在位置を取得するとともに、地図データベースにアクセスして自車両前方の道路形状情報を取得し、当該道路形状情報に基づいて自車両前方の走行道路の道路形状モデルを算出する道路形状モデル算出手段10と、取得された検出情報と算出された道路形状モデルとに基づいて道路構造物モデルを算出し、算出された道路構造物モデルと所定の位置関係を有する検出ポイントをグルーピングし、当該グルーピングされた検出ポイントに対応する物体を道路構造物として検出する道路構造物検出手段30とを有する。
(もっと読む)
位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置
【課題】 第2通信装置の位置を検出することが可能な位置検出システム、位置検出システムの位置検出方法、位置検出通信装置、通信装置を提供することを目的とする。
【解決手段】 複数の第1通信装置と第2通信装置との間の複数の距離に基づいて第2通信装置の位置を検出する位置検出システムであって、複数の第1通信装置はそれぞれ、第2通信装置との間の距離を算出するための距離算出用信号を送信する第1送信部と、距離算出用信号に応じた信号の受信によって送信したときの当該距離算出用信号と受信したときの当該距離算出用信号に応じた信号との位相差を検出する検出部と、当該位相差に基づいて第2通信装置との間の距離を算出する算出部と、を備え、第2通信装置は、距離算出用信号に応じた信号を送信する第2送信部を備え、複数の算出部にて算出された複数の距離に基づいて、第2通信装置の位置を検出する位置検出部を有する、ことを特徴とする。
(もっと読む)
距離算出システム、距離算出システムの距離算出方法
【課題】 第1通信装置と第2通信装置の間における当事者以外による不正通信を防止すべく、第1通信装置と第2通信装置の間の距離を確実に算出することができる距離算出システム、距離算出システムの距離算出方法を提供することを目的とする。
【解決手段】 第1通信装置と第2通信装置との間の距離を算出する距離算出システムであって、第1通信装置は、第2通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、第2通信装置から返信された距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する検出部と、検出部にて検出された位相差に基づいて、第2通信装置との間の距離を算出する算出部と、を備え、第2通信装置は、第1通信装置から送信された距離算出用信号を返信する返信部を備えた、ことを特徴とする。
(もっと読む)
車両用制御対象判定装置
【課題】 自車の将来の走行軌跡の信頼性が低下したときでも制御対象の誤判定の発生を防止する。
【解決手段】 レーダー装置14が自車の進行方向に存在する物体を検知した結果と、走行軌跡推定手段M1が車速およびヨーレートから推定した自車の将来の走行軌跡と、予め定められた制御対象判定条件とに基づいて制御対象判定手段M4が制御対象を判定する際に、振れ速度検出手段M3が推定された走行軌跡が左右に振れる振れ速度を検出し、振れ速度が閾値以上であると制御対象判定手段M4が所定距離以遠の物体を制御対象から除外するので、振れ速度が大きくて走行軌跡の推定精度が低下しているときに遠方の物体を制御対象から除外することで、制御対象の誤判定を回避することができる。
(もっと読む)
自動車の外部環境を監視するためのシステム及び方法
この発明のシステムは監視エリア内に含まれる物体を表している外部からの存在情報を捕捉するための補足デバイス(1)を有している。上記情報捕捉デバイス(1)は、電子システム(4)と協働する車両の軌道検出用手段(2)及び車両の傾斜検出用手段(3)といっしょになって動作する。この発明の方法は、提案されているシステムを使用しており、軌道及び/又は傾斜を捕捉デバイス(1)によってカバーされる対応する監視エリアと関係付けるチャートを形成し、使用する捕捉デバイス(1)のタイプに依存する適切な行動を電子システム(4)によって選択し実行することによって、車両の軌道及び/又は傾斜に応じて前記監視エリアを変更する段階を有している。  (もっと読む)
(もっと読む)
短パルスレーダ
【課題】 低消費電力の短パルスレーダを提供する。
【解決手段】 短パルス波を空間1へ繰り返し放射する送信部21と、空間1に放射された短パルス波の反射波を受信して検波する受信部30と、受信部30の検波出力に基づいて、空間1に存在する物体1aの解析処理を行う信号処理部45と、信号処理部45の解析結果に基づいて、送信部21および受信部30の制御を行う制御部50とを有する短パルスレーダにおいて、制御部50は、送信部21が短パルス波を空間に放射してから次の短パルス波を放射するまでの期間内に、送信部21への電源Btの供給を停止させ、また、放射された短パルス波についての反射波を受信するための期間を除く期間に受信部30に対する電源Brの供給を停止させる。
(もっと読む)
位置測定制御方法
【課題】 本発明により、GPS や無線LAN を用いたシステムでは出来なかった、通信機を有しない物体の位置を測定することが可能となり、またカメラを用いたシステムでは困難であった死角や暗所の物体も、電波等の物体を透過して測定可能なセンサを用いる事で測定が可能とすることを目的とする。
【解決手段】 本発明は、複数の該距離測定用センサを制御する制御部とで構成され、該制御部が複数の該距離測定用センサから測定結果を収集する位置測定制御方法において、該制御部が測定開始を指示する制御信号に同じ識別信号を付加して、各々の該センサに同時或いは連続して送信し、各々のセンサは制御部からの該制御信号を受信し、距離測定を開始して、距離測定が終了すると、測定結果に、該制御部で付加されたと同じ識別信号を付加して制御部に返信する位置測定制御方法を用いる。
(もっと読む)
レーダ装置
【課題】 車体とバンパーとの間等の奥行き長さが短い空間に搭載することが可能で、搭載される車両の走行状態などに応じてビーム幅の切替えを行うことができるレーダ装置を提供する。
【解決手段】 レーダモジュール1aは、放射するレーダビームによって車両周辺の障害物を検知し、放射されるレーダビームが誘電体レンズ部2aの境界面に応じて屈折する。移動機構3aは、車両の走行状態に応じて制御部4aによって動作制御され、レーダモジュール1aを放射する出射方向に対して垂直に移動させて、誘電体レンズ部2aが有する複数のレンズ部のいずれか1つとレーダモジュール1aから放射されるレーダビームとを選択的に一致させる。
(もっと読む)
マイクロ波用途およびミリ波用途のためのレーダ送受信機
本発明はマイクロ波用途およびミリ波用途のためのトランシーバモジュール(送信/受信モジュール)ないし、殊に大量生産に適している、部分モジュールを1つの集積モジュールへと相互接続するための所属のモジュールプラットフォームコンセプトに関する。トランシーバモジュールは、a)(有利には電圧制御)発振器、ミクサおよび周波数分配器の能動的な回路コンポーネントを包含する1つまたは複数の電子的な単一コンポーネントと、b)多層構造および集積された回路素子、例えばミクサのハイブリッドリング、電圧制御発振器の共振回路を有する基板とを包含する。電子的な単一コンポーネントは基板の上側面に配置されている。本発明によって、送信器機能ないし受信器機能を超高周波コンポーネントが三次元的に集積されている小型のモジュールにおいて実現することができる。  (もっと読む)
(もっと読む)
障害物検知装置
【課題】車両周辺の障害物を検知し報知する障害物検知装置において、車両遠方での障害物に対しては、音による報知を極力減らすとともに、その障害物が急接近したときには、ドライバーに速やかに伝えるようにする。
【解決手段】車両遠方と近傍を区分する距離閾値DT2を設定し、その距離閾値DT2以上の位置で障害物を検知したときは、その障害物の距離情報の時間変化から車両との相対速度を算出する。その相対速度が所定の速度VT以上のときには、急接近を表す報知(図3(b)、図4(b))を行う。また、その相対速度が、VT以下のときには、音による報知は行わない。
(もっと読む)
障害物検出装置
【課題】路面反射板や路面上方構造物を障害物として判断しない障害物検出装置を提供すること。
【解決手段】先行車両検出装置13において、上方照射波30と下方照射波31とは一部重なり合いを生じるように照射波を照射して、上方照射波30と下方照射波31とのそれぞれの反射波強度から照射波が反射した物体の種類を判定するようにした。
(もっと読む)
角度分解能を備えたアンテナシステム
本発明による角度分解能を備えたアンテナシステムでは、別個の送受信アンテナを備えた2つのレーザーセンサ(8,9)のみが設けられている。この2つのレーザーセンサ(8,9)の受信アンテナ(1,21,22)は、そのメイン放射方向に関してもその放射開口幅に関しても切換えが可能である。  (もっと読む)
(もっと読む)
先行車両検出装置
【課題】路面を先行車両と誤認識することのない先行車両検出装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を受信して先行車両の有無を検出する先行車両検出装置において、照射波が路面に照射される走行状態を検出する走行状態検出手段と、走行状態検出手段により照射波が路面に照射される走行状態であることが検出されたとき、反射波の波形に基づいて照射波を反射した物体が先行車両か路面かを判定する判定手段と、を備えた。
(もっと読む)
FM−CWレーダ装置
【課題】 隣接して複数の目標物がある場合、それぞれの目標物からの受信信号がお互い干渉して目標検出のための閾値が上がり、目標物を検出できなくなるおそれがあった。
【解決手段】 目標検出のための閾値は、目標がない状況で受信したビート信号のノイズ成分の平均値や、送受信機と地面の角度や、送受信機の利得や送受信機の温度や、降雨状態をパラメータにして決定し、目標物の振幅値で閾値が左右されないようにすることで、目標物の不検出を抑えた。
(もっと読む)
車両用後側方警報装置
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
1,321 - 1,340 / 1,457
[ Back to top ]