
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
1,381 - 1,400 / 1,457
レーダ装置の軸ずれ検知方法および検知装置
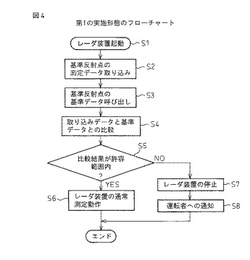
【課題】 車両単体でレーダ装置の軸ずれ検知を行うことができるようにする。
【解決手段】 車両のレーダ装置取り付け位置前方であってレーダ装置100の検知方向とは異なる方向にある車体の一部に微小反射材を配置し、検知方向にアンテナの指向方向を一致させてレーダ装置100を車体101に取り付け、このようにして取り付けられたレーダ装置100を用いて微小反射材に関する基準データを取得し、車両の使用時にレーダ装置100によって微小反射材に関する使用時データを取得し、基準データと使用時データとを比較して比較結果が予め設定された一定値を超える場合レーダ装置100の軸ずれと判断する。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置

【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
センサシステムの作動方法および作動装置
センサシステムの作動方法および装置を提示する。ここでは処理ユニットはセンサシステムの少なくとも1つのセンサと、通信接続手段を介して接続されている。さらにこの処理ユニットは少なくとも1つのセンサにデータを伝送する。このデータは、センサの少なくとも1つの検出領域および/または探知領域、および/またはセンサのモードを制御するための制御データをあらわす。  (もっと読む)
(もっと読む)
ミリ波レーダ装置
【課題】 故障を的確に判定できるミリ波レーダ装置を提供する。
【解決手段】 制御部にて、スイッチが送信機による送信信号の出力をONしているときを通常サンプリング、スイッチが送信機による送信信号の出力をOFFしているときを故障検出用サンプリングとし、これらそれぞれのサンプリングの際において、ビート信号生成手段が生成したビート信号を周波数解析する。そして、通常サンプリングの際に周波数解析を行ったときのDC値と、故障検出用サンプリングのときに周波数解析を行ったときのDC値とを比較することにより、故障が発生しているか否かを判定する。
(もっと読む)
他車両検出装置
【課題】反射波からその反射波の原因となったものが他車両であるか、あるいは道路構造物といったその他の物体であるかといった区別をすることができる他車両検出装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を用いて他車両の検出を行う他車両検出装置において、反射波が持つ強度のパターンから他車両の有無を判定する他車両判定手段を備えた(ステップS3〜ステップS5)。
(もっと読む)
移動物体検出装置
【課題】 自車両が走行している場合に、静止物体から反射された反射信号成分を抑制して、効率よく移動物体のみを検出する。
【解決手段】 レーダ装置1により自車両の周囲の移動物体を検出するに際して、信号処理部4は、FFT処理部32により周波数差信号の周波数スペクトルを算出すると共に、周波数オフセット量算出部33により、自車両速度に応じたドップラシフト量を算出する。そして、周波数オフセット部34は、送信周波数上昇期間の周波数スペクトルをドップラシフト量だけ正方向にオフセットさせると共に、送信周波数下降期間の周波数スペクトルをドップラシフト量だけ負方向にオフセットさせ、物標認識部35は、正方向にオフセットされた周波数スペクトルと、負方向にオフセットされた周波数スペクトルとを差分演算して得られる周波数スペクトルに基づいて、移動物体を検出する。
(もっと読む)
車両用物体検知装置
【課題】 移動可能な物体に対する検知漏れを低減する車両用物体検知装置の提供を目的とする。
【解決手段】 車両に搭載され、車両の周囲の物体を検知する物体検知装置において、物体の位置を検出する位置検出手段と、物体が移動可能な物体か否か判定する物体判定手段と、物体判定手段において物体が移動可能な物体と判定された場合に、物体位置検出手段において検出された物体の位置を基準として、物体を取り囲む所定の領域を常時設定する領域設定手段とを有する。
(もっと読む)
車両周辺監視装置
【課題】装置全体を傾けることのできないほど狭い空間内に取り付けても、バンパ等に対する入射角の設定を最適にできるようにした装置を提供することである。
【解決手段】車両の外装内側に設けられて車両周辺に存在する物体を監視する車両周辺監視装置において、外装を透過させて周囲に向けて送信波を放射する送信アンテナと、周囲の物体からの反射波を受信する受信アンテナと、送信アンテナと外装との間に設けられた送信波反射鏡であって、送信アンテナからの送信波の外装の表面に対する入射角度を送信波の外装の表面での反射が少なくなるようにする送信波反射鏡とを備えたものである。
(もっと読む)
近距離レーダー測定用のマルチスタティックセンサ装置およびこのセンサ装置の駆動方法
対象物までの距離を測定するマルチスタティックセンサ装置は、送信ユニット(Tn)および受信ユニット(Rm)を有しており、これらはそれぞれ1つずつ高周波数発振器(HFO‐Tn,HFO‐Rm)およびパルス発生器(PG‐Tn,PG‐Rm)を有している。パルス発生器(PG‐Tn,PG‐Rm)には信号発生器からクロック信号(TS,RS)が供給され、ここでクロック信号(TS,RS)は共通のデータバス(B)を介して送信ユニット(Tn)および受信ユニット(Rm)へ伝送される。これにより高周波数発振器(HFO‐Tn,HFO‐Rm)の高周波数信号の確定的な位相比が形成される。
さらに上述のセンサ装置の駆動方法では、まず2つのクロック信号が共通のデータバス(B)を介して送信ユニットおよび受信ユニットへ供給される。次に送信ユニットから信号が対象物へ送信される。さらにデータバス(B)を介して受信ユニット(Rm)を通って得られたクロック信号が対象物(O)での反射信号と混合され、ここから評価可能な測定信号が形成される。ここで距離軸線での測定信号のキャリブレーションは共通のデータバスのクロック信号のゼロ点を求めることにより行われる。これによりデータバスを介した2つのクロック信号の位相が比較される。 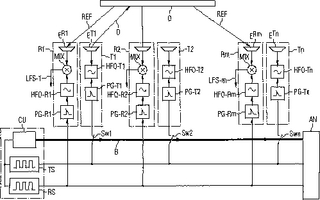 (もっと読む)
(もっと読む)
障害物検知装置
【課題】 復帰可能な通信異常の発生時において、復帰させるための処理に要する時間を考慮することなく通信異常から復帰させること。
【解決手段】 センサの作動を禁止する禁止条件に該当する場合、処理ユニットとの通信を停止したセンサが少なくとも1つあれば、全てのセンサに対し再度パラメータ設定処理を実行する(S610)。次に、通信を再開させたセンサにおいてパラメータが正常に設定されたか否かを判定し(S620)、正常に設定された場合には、状態フラグを「正常:0」にセットし、S400へ処理を移行する。これにより、次回のS400の処理において作動条件に該当すると判定された後、S500以降の処理において、通信を再開させたセンサによる障害物検知が行われるようになる。
(もっと読む)
他車両検出装置及び車間距離制御装置
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
車速度測定システム
【課題】 特別な機器を設置しなくても車速度を測定することが可能なシステムを提供する。
【解決手段】 このシステムは、路上に設置された複数のアクセスポイント11と、路上を走行する車両12に搭載された無線端末13とを備えている。車両12がアクセスポイント11の設置点付近を通過する場合、受信信号強度(RSSI)は、車両12がアクセスポイント11に近づくにつれて徐々に増加し、アクセスポイント11に最も近づいた時点でピークに達し、アクセスポイント11から離れるにつれて徐々に減少する。そして、車両12の速度v[m/s]が速ければグラフのカーブは急峻となり、速度v[m/s]が遅ければグラフのカーブは緩やかになる。したがって、このようなRSSIの変化の度合いから車速度を算出することができ、さらには、RSSIのパターンの違いから、車両の上り・下りを判断することもできる。
(もっと読む)
雨量検知式制御装置
【課題】雨量に応じて車間距離制御や車間距離警報などの制御を実行する場合に、トンネル等により一時的に雨が遮断されることがあってもドライバに違和感を与えることのない制御を行うことができる雨量検知式制御装置を提供すること。
【解決手段】雨量に応じて車両の制御を行う装置において、雨量が所定雨量を超えているか否かを判断する雨量判断手段と、雨量が所定雨量を超えているときには雨量に応じた車両の制御を解除する制御解除手段と、トンネル等により雨が遮断される距離を取得する雨滴遮断距離取得手段と、この距離が所定距離より短いときには、雨量が所定雨量を超えていなくても、解除した車両の制御が復帰するのを禁止する制御復帰禁止手段とを備えている。
(もっと読む)
距離画像センサの較正方法
【課題】電磁波を用いた車載用距離センサの位置あわせに関して、少なくとも部分的な較正を高精度に行う方法を提供する。
【解決手段】少なくとも1つの走査エリアに沿って検出レンジを走査することが可能であり、かつ走査エリア又は距離画像センサの車両に対する位置合わせに関して対応する距離画像を検出することが可能であるような、車両上に取り付けられる電磁放射線用距離画像センサを少なくとも部分的に較正するための方法であって、上記距離画像センサと少なくとも1つの較正面上の領域との距離を前記距離画像センサによって求め、前記位置合わせを少なくとも部分的に記述するパラメータ(特にピッチ角である方向性)の値を求められた距離を使用して決定する方法。また、同時にビデオ画像の較正を距離センサの較正結果を考慮して行い、較正機能部の位置座標によって距離センサ検出結果のビデオカメラ上への画像化が行われる。
(もっと読む)
自動車のシート上の人の位置を識別するための装置及び方法
本発明はトランシーバ(9)を有し、このトランシーバ(9)は高周波信号を送信し、これらの高周波信号はシートにおけるリフレクタ(6)によって反射される。リフレクタ(6)の診断のために独自の診断リフレクタ(10)がシートの縁部側に配置されている。診断リフレクタ(10)は、通常はシート(2)上の人(1)によって遮蔽されないように配置されている。この場合、診断は人の識別と同時に実施される。 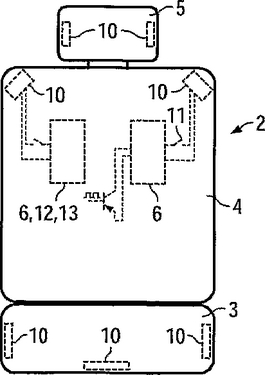 (もっと読む)
(もっと読む)
車両周囲物体検出装置
【課題】グルーピングされた検出点のいずれかの相対位置に誤差が含まれている場合であっても、物体の相対位置を求めるときにその誤差の影響を取り除くことができる車両周囲の物体を検出する装置を提供する。
【解決手段】自車両前方の物体について、各検出点において位置座標を検出し(ステップS1)、所定の条件を満たす検出点同士をまとめて物体ごとに検出点のグループを作成し、グルーピングを行う(ステップS6、S10)。このグルーピングされた検出点のそれぞれについて、信頼性判断値R1(t)またはR2(t)を算出し(ステップS7、S11)、その値に基づいて、同一グループにグルーピングされた検出点から代表検出点を選択する(ステップS8、S12)。選択された代表検出点の相対位置に基づいて、物体の相対位置を決定する(ステップS9、S13)。
(もっと読む)
車両の駐車過程用の幾何学的形状データを検出するための方法
車両の駐車過程用の幾何学的形状データを検出するための方法において、車両が駐車スペースに沿って側方を走行する間、複数回に渡り、相前後し、車両と車道縁との間の側方間隔が、車両固定式で配設されている間隔センサを用いて測定される。車両縦軸線と車道縁との間の角度が次の検出により決定される、即ち、駐車スペースに沿った走行時に車両の横運動から得られる、目下の車両縦方向と規定の縦方向との間の横運動角度を検出すること、車道縁の輪郭延在態様から得られる、規定の縦方向と車道縁との間の車道縁角度を検出すること、及び、横運動角度と車道縁角度とを加算することによって目下の車両縦軸線と車道縁との間の角度を検出することである。 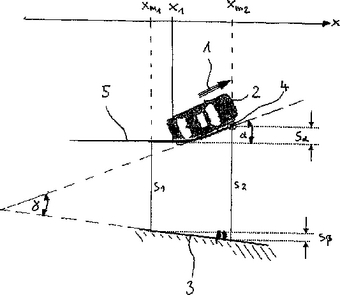 (もっと読む)
(もっと読む)
パルス長さ整合フィルタ
【課題】多様なパルス幅を有するパルスを正確且つ効率的に積分することができる積分器の提供。
【解決手段】受信器回路は、差動増幅器(200、300、400)と、この差動増幅器のコモンモード電圧を調整するため差動増幅器に制御電流を供給するために差動増幅器に結合された少なくとも1個のコモンモード帰還回路(240)とを具備する。受信器回路は入力信号を積分及びサンプリングし、センサ回路の一部として使用することができる。
(もっと読む)
パルス変調回路
【課題】スイッチ動作時のON/OFF動作を改善するとともに、パルス変調回路全体としての出力電力のON/OFF比を改善することができる。
【解決手段】LO信号とDCパルス信号とを入力し、LO信号の2倍波とDCパルス信号とを混合してRFパルス信号を出力するハーモニックミクサ1を用いたパルス変調回路であって、ハーモニックミクサ1の前段にSPSTスイッチ2を直列接続し、SPSTスイッチ2をDCパルス信号によりハーモニックミクサ1と同時にスイッチング動作させる。これにより、SPSTスイッチ2のON/OFF比に、ハーモニックミクサ1自体のON/OFF比を加算できるので、スイッチ動作時のON/OFF動作を改善するとともに、パルス変調回路全体としての出力電力のON/OFF比を改善することができる。
(もっと読む)
車両における対象検出方法および対象検出装置
対象検出システムを搭載した車両における対象検出方法および装置であって、対象検出システムは、電磁波を送出して検出領域内の対象で反射された波を受信し、認識された対象で反射され、付加的に車道に沿って延びる対象で反射された波を評価する。この評価は妥当性を評価するものであって、その妥当性の評価においては間接的な対象反射によって直接測定された対象反射が検証される。あるいはその前に検出された対象からもはや反射が測定できない場合に、それ以降の対象検出に間接的な対象反射を利用することにある。 (もっと読む)
1,381 - 1,400 / 1,457
[ Back to top ]