
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
1,421 - 1,440 / 1,457
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 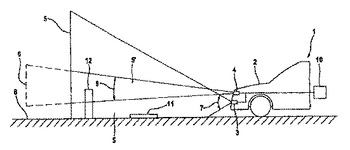 (もっと読む)
(もっと読む)
自動車用安全手段を始動する方法
本発明は、自動車における安全手段を始動する方法に関する。前記方法によると、自動車の送受信装置は自動車の所定の近接周辺領域において電磁界を放射し、第2の自動車の送受信装置は、第2の自動車が、第1の自動車の所定の近接周辺領域に位置する場合、第1の自動車の送受信装置によって受信される応答信号を送信する。本発明によると、第1の自動車用安全手段は、事故発生前、すなわち応答信号が受信されるとすぐに始動する。  (もっと読む)
(もっと読む)
ブラインドスポットセンサシステム
本発明は、自動車の所定の監視領域内の対象を検出及び/又はクラス分けするためのブラインドスポットセンサシステムであって、少なくとも第1のレーダービームを照射する第1の手段と第2のレーダービームを照射する第2の手段を含んでいる。本発明によれば、第1のレーダービーム(ビームI)の半径方向視野が自動車の走行方向(Vx)に対して次のように傾斜されかつ第2のレーダービーム(ビームII)の半径方向視野が前記走行方向(Vx)に対して実質的に直角に次のように配向され、すなわち前記レーダービームの視野が少なくとも部分的に重なりかつ前記両ビームが共に監視領域の測量を実質的にカバーするように傾斜されて配向されており、さらに少なくとも前記第1のレーダービームがCW変調モードでもFMCW変調モードでも作動可能であるように構成されている。 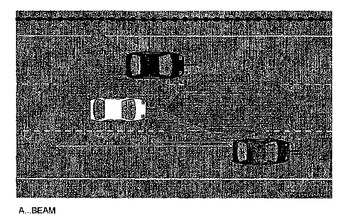 (もっと読む)
(もっと読む)
マルチファンクションアップフロントセンサ
コンパクトなマルチファンクションセンサエレメントを提供するために、自動車の加速度捕捉検出のためのセンサエレメントは付加的に、自動車と外部の物体との間の距離を測定するための距離測定装置を備えている。  (もっと読む)
(もっと読む)
パルス波レーダー装置
変調パルス波のパルス幅には1nsec以下が要求されるが、従来用いられているPINダイオードでこのようなパルス幅の狭い変調パルス波を扱うことは困難である。一方、パルス波レーダー装置では、パルス幅の狭い変調パルス波を扱うと、わずかの内部伝搬遅延の誤差であっても測定した時間の誤差に大きく影響することとなる。このような課題を解決するために、パルス幅の狭い変調パルス波を出力するパルス変調器及びパルス幅の狭い変調パルス波を出力することのできるパルス波レーダー装置を提供することを目的とする。上記目的を達成するために、本願発明のパルス変調器及びパルス波レーダー装置は、パルス発生回路からのパルスを微分して幅の狭い微分波を発生させ、この微分波で発振回路からの発振波をスイッチングすることにより、パルス幅の狭い変調パルス波を出力するものである。 (もっと読む)
レーダ装置
送信部は、所定幅のトリガパルスによってパルス変調された所定の周波数を有するレーダ波を探査対象空間に発射する。受信部は、前記レーダ波の反射波を受信して受信信号を出力する。ローカルパルス発生部は、遅延部によって遅延された前記トリガパルスによってパルス変調された前記所定の周波数を有するローカルパルス信号を出力する。相関値検出部は、前記受信信号とローカルパルス信号との強度についての相関値を検出する。遅延時間可変部は、前記遅延時間を、前記トリガパルスの発生周期である前記所定周期の範囲内で順次変化させる。相関値記憶部は、可変される遅延時間毎に検出される前記相関値を記憶する。度数分布作成部は、記憶された相関値の前記遅延時間に対する度数分布を作成する。探査制御部は、作成された度数分布に基づいて、前記探査対象空間についての解析を行う。 (もっと読む)
自動車のレーダーシステム

隣接車線(10,14;50)上の交通を監視するための50mよりも短い到達距離を有する少なくとも1つのレーダーセンサ(22,24)を有する,自動車(16)のためのレーダーシステムは,レーダーセンサ(22,24)が,位相制御されるアンテナ(36)と,異なる幾何学配置を有する複数のレーダーローブ(26,28;30,32;26’,28;44;46,48)を調節するための制御装置(40,42)とを有することを特徴としている。 (もっと読む)
車載レーダ装置およびその信号処理方法
複数のアンテナを切り替えるものにおいては、同時に検知できる範囲は1つであるため、遠距離向けのアンテナの使用時は、近距離の検知範囲が細くなり、逆に近距離向けのアンテナの使用時は、最大検知距離が低下する。また、レーダと画像センサを組み合わせるものでは、画像センサは、悪天候や光線条件(逆光,順光等)によってレーダ単体の場合と同様の検知性能になる場合がある。前方に電波を照射して反射波を受信することにより、少なくともターゲットとの相対速度又はターゲットの位置を検出する第1レーダと、該第1レーダとは検知範囲が異なる第2レーダとを備え、双方とも常時ターゲットの検知を行う。また、上記のようなレーダ装置において、ターゲットが前記第1レーダの検知範囲から外に出たときは、その直前の前記ターゲットの検知情報を前記第1レーダから前記第2レーダに引き渡す。 (もっと読む)
レーダ
所定の測定タイミングt−nTでの第1の突出部のピーク周波数f1[t-nT]から、今回の測定タイミングtでの第1・第2の突出部のピーク周波数の中心周波数fr[t] を予測し、(f1[t] +f2[t])/2が予測したfr[t] に近似するf1[t] 、f2[t] をペア候補として抽出する。また、ドップラシフト周波数が第1の突出部のピーク周波数f1[t-nT]および第2の突出部のピーク周波数f2[t-nT]から求まるドップラシフト周波数に略等しいf1[t],f2[t]を選択する。 (もっと読む)
レーダセンサ及びこのレーダセンサの動作のための方法
本発明は自動車のためのレーダセンサに関し、このレーダセンサは送信装置及び受信装置を有する。本発明によれば、センサ特性は、自動車の走行動作中に送信パラメータ及び受信装置の受信パラメータが可変的であることにおいて適合される。 (もっと読む)
2つ以上のセンサを有する装置
本発明は、信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。ここで本発明によれば、各センサが他のセンサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにするために、各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離される。 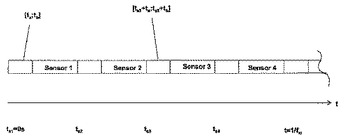 (もっと読む)
(もっと読む)
レーダ
バックグラウンドノイズの強度によって第1のしきい値(TH1)を定め、ピーク(P1),(P2),(P3)の各裾野部分にピーク位置から所定の近傍周波数領域にしきい値(TH21),(TH22),(TH23)を設定し、各FFTビンでこれらのしきい値のうち値の高い方を最終的なしきい値として採用し、そのしきい値を超えるピークをターゲットピークと見なして検出する。これにより、ビート信号の周波数スペクトルに含まれている物標からの反射波に起因して生じるターゲットピークを確実に検出し、物標の探知精度を高める。  (もっと読む)
(もっと読む)
線形サブアンテナによって構成される十字アンテナおよび一連の処理
本発明は、線形サブアンテナを含む十字アンテナ及びその一連の処理に関するものである。特に、本発明は、第1及び第2線形部を形成し、基本信号(Si´,Gj´)を生成するセンサ(21−2M,31−3N)を備え、第1及び第2線形部のそれぞれの中間点に接する、第1及び第2のそれぞれの接線方向ベクトル間の角度が、30°から150°の間の角度である第1(2)及び第2(3)線形サブアンテナと、結合信号(VSi,VGj)を形成するアンテナ処理装置(4,5)と、有用な結合信号(TSi,TGj)を生成する信号処理装置(6,7)と、有用な結合信号間の相関係数([Cij])を算出する装置(8)と、相関係数が閾値を超える場合に、検出信号([Rij])を生成する装置(8)とを有するアンテナ(1)に関するものである。本発明は、例えば、同等の性能レベルのためのいくつかのセンサを有するアンテナを得るために用いることができる。 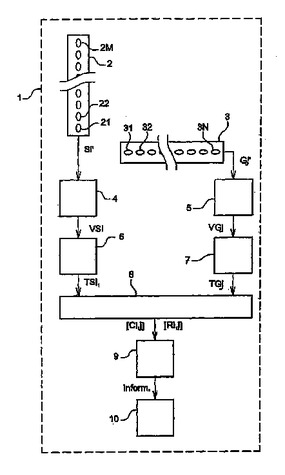 (もっと読む)
(もっと読む)
自動車用の測定装置

測定装置(10…)と少なくとも1つの物体(20)の間の距離を測定するための、および/または、測定装置と少なくとも1つの物体(20)の間の速度差分(v)を測定するための、自動車(1)用の測定装置に関する。測定装置は、信号部分(A(t)…)の2つのシーケンスと、各々が2つの一時的に変化する信号部分(Al…)を有する信号部分(A(t))の第1シーケンスおよび信号部分(B(t))の第2シーケンスとを包括する、送信信号を送信するための放出装置(35、55)を備える。信号部分(A(t)…)のシーケンスの2つの信号部分(A1…)の周波数は、それぞれ1差分周波数だけ異なり、信号部分(A(t))の第1シーケンスの差分周波数は、信号部分(B(t))の第2シーケンスの差分周波数と異なる。 (もっと読む)
レーダ
所定方位幅に広がる探知用電波のビームを送信し、物標からの反射波を受信するとともにビームの中心方位を変化させて所定単位角度毎且つ所定距離毎の受信信号の強度分布を検出し、方位変化に対する受信信号強度分布を直角座標で表した時にビームの方位幅により定まる方位幅を底辺とする二等辺三角形で近似させたときの頂点方位を物標の中心方位として検知する。これにより、探知用電波のビーム幅より高い分解能で、または方位方向のサンプリング間隔より高い分解能で物標の方位を検知できるようにし、また受信信号強度のピーク位置が物標の中心からずれる問題を解消する。  (もっと読む)
(もっと読む)
自動車安全装置用の物体認識装置および方法
本発明は、少なくとも1つの電磁波(12)を発生するために構成されている信号源(11)および障害物(16)から反射される少なくとも1つの電磁波(18)用の受信機(14)を備えた自動車搭乗者保護システム用物体認識装置に関する。本発明によれば、評価装置(20)が設けられて、障害物(16)から反射されかつ受信機(14)によって受信される少なくとも1つの電磁波(18)の偏波を評価し、かつ少なくとも1つの評価信号(22)を発生するように構成されている。それにより、例えば表面構造のように障害物に関する付加的な情報を得て、自動車搭乗者保護システムのために使用することが可能である。 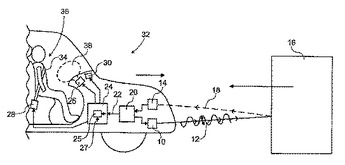 (もっと読む)
(もっと読む)
位置情報の決定
物体(102)に関する位置情報を決定するための機器(200)であって、複数の受信エレメント(212、214、216、218)を含む、受信するための手段(210)と、受信エレメント(212、214、216、218)で受信された信号(106)を検出し、受信信号を表す出力信号を生成するための検出手段(230)と、各受信エレメント(210)ごとに、他の任意の受信エレメント(212、214、216、218)で受信される信号から生成される任意の出力信号とは別に、その受信エレメント(210)で受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号(106)を表すパラメータのそれぞれの値を得るように動作可能な処理手段(260)とを含み、処理手段(260)はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得するように動作可能な機器(200)。  (もっと読む)
(もっと読む)
処理装置および対象物検出装置
検出対象の接近に伴い変動する電気信号を生成するセンサ10に接続され、上記電気信号を処理する処理装置11であり、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段7と、前記電気信号の波形から前記検出対象の接近を判定する手段8とを備える (もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 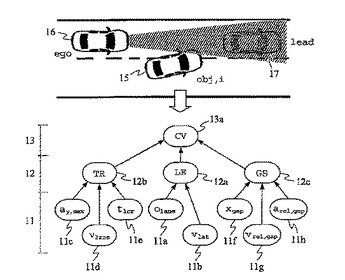 (もっと読む)
(もっと読む)
車両の周囲にある障害物の輪郭を検出するための方法およびコンピュータプログラム
【課題】本発明は、好ましくは車両の側方領域に組み込まれているセンサ手段(110)によって、走行する車両(200)の周囲にある障害物(300)の輪郭を検出する方法に関する。
【解決手段】発生された反射信号をまず数学的に平均化して、かくて得られた平均化された反射信号から、障害物の実際の位置および障害物の輪郭の実際の形状をより正確に導き出すことができる。 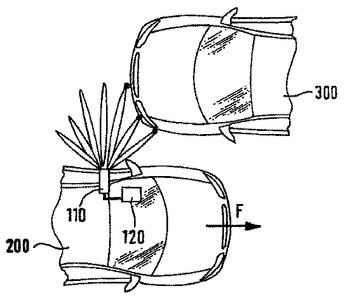 (もっと読む)
(もっと読む)
1,421 - 1,440 / 1,457
[ Back to top ]