
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
501 - 520 / 647
レーダ装置

【課題】 追尾目標数よりも数の少ない励振機しか備えていないレーダ装置により、時分割を用いずに目標追尾を実施する。
【解決手段】 アンテナ4の開口面を分割するとともに、励振機1内において、中心周波数が等しい2つの送信信号を生成し、一方の送信信号にアップチャープ変調を施し、もう一方の送信信号にダウンチャープ変調を施し、送受切替器2に接続されたアンテナ4の第1の開口部により複数の目標に対して信号の送受信を行うようにし、アップチャープ変調を施した信号を送信したアンテナ4の第1の開口部からの受信機5で受信した信号はダウンチャープ変調を施した信号により復調を行い、ダウンチャープ変調を施した信号を送信したアンテナ4の第2の開口部からの受信機7で受信した信号はアップチャープ変調を施した信号により復調を行うようにした。
(もっと読む)
障害物検知システム

【課題】複数のレーダ装置を備えた車両において電波干渉が生じた場合、送信周波数等を変更して電波干渉を回避しなくてはならない。本発明は、各レーダ装置の送信周波数等の情報を共有化することにより、送信周波数等の変更後に、再び他レーダ装置との電波干渉を引き起こさないようなレーダ装置を提供する。
【解決手段】近接した複数のレーダ装置が、通信を介してお互いの変調態様情報を共有することにより、外界からの電波干渉時でも共有相手に対する電波干渉が発生しないようにする。
(もっと読む)
超広帯域モニタリング・システムおよびアンテナ
モニタリング・ステーションと前記モニタリング・ステーションと通信する少なくとも一つのセンサーとを有し、一または複数の生体被験体の生命徴候をモニタリングする装置。前記センサーは、アンテナ・システムと、前記アンテナ・システムに結合された超広帯域レーダー・システムと、信号プロセッサと、通信システムとを有する。前記信号プロセッサは、前記超広帯域レーダー・システムからの信号を受信するよう接続され、前記信号から、前記アンテナ・システムに対応する検知体積中の人または動物の一つまたは複数の生命徴候についての情報を抽出するよう構成されている。前記通信システムは、前記情報を前記モニタリング・ステーションに送信するよう構成されている。  (もっと読む)
(もっと読む)
車載用レーダ装置
【課題】ターゲットの有無によらず距離計測誤差を検出し、補正を行うことができる信頼性の高い車載用レーダ装置を提供することにある。
【解決手段】信号処理部11に、距離算出部21と、反射地面距離算出部22と、幾何学的距離算出部23と、距離誤差算出部24と、距離補正および報知部25とを備える。反射地面距離算出部22において、受信電波のうち地面から反射した成分のみを抽出し、処理することで、車載用レーダ装置1から地面までの距離を算出する。幾何学的地面距離算出部23において、送信電波が地面に接するまでの最短距離を算出する。距離誤差算出部24において、車載用レーダ装置1から地面までの距離と、送信電波が地面に接するまでの最短距離とを比較することで距離誤差を算出する。距離補正および報知部25において、距離誤差に応じて、距離算出部21が算出した距離を補正する。
(もっと読む)
不要波抑圧装置
【課題】サイドローブだけでなく、主ビーム方向やそれに近い方向から入射するクラッタなどの不要波を十分に抑圧できる不要波抑圧装置を得る。
【解決手段】アレーアンテナ1を構成する複数の素子アンテナの受信信号を入力して、複数の方向に受信ビームを同時に形成するマルチビーム形成手段2〜5と、受信ビームのビーム信号を複数の帯域に分割するDFB6と、前記複数の素子アンテナにおける想定帯域内の各周波数に対する指向特性を示す時空間周波数特性データを記憶するデータ記憶部7と、前記時空間周波数特性データ及び分割された複数のビーム信号を利用して、予め設定された所定の時空間周波数特性との誤差に基づく評価関数を最小化する荷重を計算する荷重計算手段8、9aと、前記分割された複数のビーム信号に、前記荷重を乗算し、荷重乗算後のビーム信号を足し合わせて不要波成分が抑圧された信号を出力する総和手段10〜12とを設けた。
(もっと読む)
目標類別装置
【課題】蛇行目標の類別性能を向上させる目標類別装置を得る。
【解決手段】追尾情報の目標の距離で受信信号の位相補償を行い、補償後の信号に基づき算出したドップラー周波数により補償後の信号を更に位相補償し、再補償した信号に基づきドップラープロフィールを生成し、追尾情報、上記変化量率から推定したアスペクト角の変化量に基づいてドップラープロフィールをクロスレンジプロフィールに変換し、追尾情報に基づいて推定したアスペクト角に対応する候補目標の受信信号をライブラリから抽出して候補目標のドップラープロフィールを算出し、該ドップラープロフィールをアスペクト角の変化量に基づいて参照プロフィールに変換し、両プロフィールに基づいて観測目標と候補目標の特徴量をそれぞれ算出し、両特徴量を比較して目標類別を行う。
(もっと読む)
パルスレーダ装置
【課題】目標との間の相対速度が0でない場合に、1回の高分解能の測距結果を得るために必要な信号送信時間間隔を、本来検出すべき目標までの距離に適用できる範囲で短くした上で高精度に目標までの相対距離を検出する。
【解決手段】所定の周波数間隔ずつ変化する送信パルス列A、Bを時分割で目標方向へ送信することにより得られた受信信号から、パルス列Aに対応する複素ディジタルビデオ信号Aおよびパルス列Bに対応する複素ディジタルビデオ信号Bを生成し、複素ディジタルビデオ信号Aおよび複素ディジタルビデオ信号Bの虚部の符号を反転した複素共役ディジタルビデオ信号Bを乗算して相対速度計測用複素信号を生成する複素乗算手段17と、相対速度計測用複素信号の周波数スペクトルを求める周波数スペクトル分析手段18と、周波数スペクトルを用いて目標との相対速度を求める相対速度計測手段19とを備える。
(もっと読む)
レーダ装置とその信号処理方法
【課題】観測対象の速度分布のばらつきが大きい場合でも、高い精度で観測対象の速度を算出する。
【解決手段】繰り返しレーダパルスを送信しレーダエコーを受信しつつレーダ覆域をスキャンするレーダ装置であって、複数のスキャンごとに速度スペクトルを位相差ベクトルに変換する。そして、複数のスキャンの1つを基準スキャンにして、複数のスキャンの位相差ベクトルを、基準のスキャンに相当する位相差ベクトルにそれぞれ補正する(ステップS2a〜S2c)。さらに、補正された位相差ベクトルを含む複数のスキャンの位相差ベクトルを連続するようにし(ステップS2d,S2e)、この連続する複数のスキャンの位相差ベクトルをもとに前記ターゲット領域の速度を算出する(ステップS2f)。これにより、観測対象の速度分布のばらつきが大きい場合でも、多くのデータを用いて、高い精度で観測対象のドップラ速度を算出できるようになる。
(もっと読む)
検出方法と検出装置
テラヘルツ輻射検出システムにおいて、複数の調波送信機/受信機からなるアレイを視野を横断して走査させることができる。不平衡ショットキー・ダイオード対をヘテロダイン受信機のミクサの中で用いることにより、その受信機を送信機に変換し、局所発振器の偶数調波の位置でテラヘルツ輻射を発生させることができる。その送信機と受信機の中で周波数が異なる局所発振器を用いることにより、その受信機は発生した輻射を検出することができる。別の構成では、送信機の局所発振器は、受信機と同じ周波数を持っていてもよいが、直接に、または単に送信機が視野を横断して走査された結果として変調されていてもよかろう。直接に変調される場合には、振幅変調または周波数変調が可能であり、これらには異なる利点がある。ショットキー・ダイオード対に対する電気的バイアスをオンとオフにすることにより、受信機を送信機の機能と受信機の機能の間で切り換えることができる。本発明の実施態様には、出力の信号対雑音比が大きいことと、IF出力の狭い帯域幅処理を利用していることというさらなる利点がある。 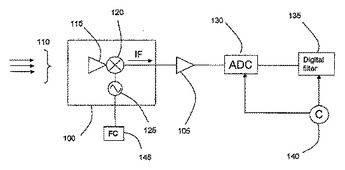 (もっと読む)
(もっと読む)
送受信装置
【課題】目標レーダに有効な欺瞞妨害を行えるジャミング波を生成し、レーダ機能の実施時に、目標レーダ波も受信した状況であっても、相互相関計算により正確な目標検出を行うことができるようにする。
【解決手段】目標レーダ波を受信して分析抽出した当該目標レーダ波の諸元に基づいて送信手段において生成されるジャミング信号の周波数を、欺瞞制御手段により、所定の周期で所定量変動させるものである。
(もっと読む)
マイクロバースト検出装置およびその観測手順設定方法
【課題】観測中に受信光の結合効率が劣化することはなく、全観測領域を短時間で観測することを可能とする。
【解決手段】放射部001と、送受信部002と、送受信部から出力された受信信号に信号処理を施してドップラ速度の算出と、ドップラ速度の空間分布からマイクロバーストを検出する信号処理部003と、放射される電磁波の放射方向を走査する駆動部005と、各部を制御、監視する制御部006と、観測領域内で現在観測中のビーム方向での最大距離を抽出する最大距離抽出部201と、最大距離となる観測領域中の点で結合効率が許容値以内となるように走査速度を設定する角速度設定部202とを備え、現在観測中のビーム方向に応じて、角速度設定部202で設定された角速度に基づいてビーム走査速度を可変にしてビーム走査する。
(もっと読む)
セキュリティ装置
【課題】 屋内に設置したドップラーセンサにより屋外の状況を監視するに際し、窓ガラス面等に付着し、下降移動する雨滴等による誤動作を防止し、侵入者の接近を精度良く検出することができるセキュリティ装置を提供すること
【解決手段】 対象物の接近・離反を判定可能なマイクロ波ドップラーセンサ10を内蔵するセキュリティ装置20を、屋内の天井1に取り付ける。ドップラーセンサの監視方向(マイクロ波の出力信号の放射方向)が、窓ガラス2に対して上部から所定の角度(伏角θ=約45°)になるように設定する。侵入者が接近した場合には、ドップラーセンサの出力に基づく接近・離反判定は、「接近」となるが、窓ガラスに付着した雨滴が下降移動すると、ドップラーセンサの出力に基づく接近・離反判定は、「離反」となる。よって、雨滴による誤動作をすることなく侵入者の接近を検知できる。
(もっと読む)
レーダ装置
【課題】空間均一性がない場所でも、複数台のレーダ装置を設置することなく、風速ベクトルの計測精度を高めることができるようにする。
【解決手段】送受信部1により生成されたレーザ光のビーム方向を切り換えながら、そのレーザ光を大気中に放射するビーム放射部2と、そのビーム放射部2によりレーザ光が放射される方向に設置され、そのレーザ光のビーム方向を観測点4が存在している方向に切り換える反射鏡3a,3b,3cとを設け、その観測点4により反射されたビーム方向が異なるレーザ光A’,B’,C’のドップラー速度を解析し、複数のドップラー速度を合成して風速ベクトルを算出する。
(もっと読む)
レーダー装置
【課題】
一つの反射対象である物体に引き起こされた複数の反射波から、一つの反射対象である物体を検出することが可能なレーダー装置を提供する。
【解決手段】
本発明は、所定の範囲に送信波を送信し、対象物によって反射される反射波を受信するレーダーセンサと、受信した反射波の強度分布のピーク位置に基づいて、対象物の位置を決定する処理部とを有するレーダー装置を提供する。処理部は、複数のピーク位置を検出した場合、検出した複数のピーク位置を、各ピーク位置と以前に検出した対象物の位置との差に基づいた重みで加重平均をとることにより、対象物の真の位置を求めることを特徴とするレーダー装置。
(もっと読む)
車載センサの補正装置および方法
【課題】レーダやカメラといった異なる種類のセンサを併用して周辺物の位置を検出するシステムの出荷後であっても、何れかのセンサに発生した位置ずれを適切に補正可能な「車載センサの補正装置および方法」を提供する。
【解決手段】カメラ1の撮影画像に対して画像認識処理を行うことで、撮影画像内における周辺車両のピクセル位置を検出する画像処理部2と、レーダ3により検出された周辺車両の位置を撮影画像内におけるピクセル位置に換算する情報処理部4と、両ピクセル位置の差分がなくなるような補正量を求め、この補正量に従ってカメラ1の向きを補正する補正処理部5とを設け、車両の走行中におけるレーダ3の検出結果に合わせてカメラ1の向きを補正することにより、システムの出荷後であっても、任意のタイミングで、カメラ1に発生した位置ずれがなくなるようにカメラ1の向きを適切に調整できるようにする。
(もっと読む)
レーダー装置
【課題】
検出範囲の端部において迅速に物体を検出することが可能なレーダー装置を提供する。
【解決手段】
本発明は、所定の角度範囲に送信波を送信し、対象物に反射される反射波を受信するレーダーセンサと、受信した反射波の角度に対する強度分布から、強度のピークを求め、ピークに基づいて対象物の方向を決定する処理部とを有するレーダー装置を提供する。 処理部は、角度範囲の端部において反射波を検出し、かつ、ピークを検出しない場合、検出した反射波の強度分布から、対象物が端部の方向に存在しているかの判定を行うことを特徴とする。
(もっと読む)
物体検出装置および物体検出方法
【課題】移動物体と静止物体とを区別して検出可能な車両搭載用の物体検出装置を提供する。
【解決手段】周波数変調された信号を照射した物体からの反射信号をFFT処理手段32でFFT処理した受信IF信号について、自車両の速度に応じたドップラシフト量を基に周波数オフセット量算出手段33で得た周波数オフセット量を、周波数オフセット手段34で、周波数上昇部の周波数スペクトルには加算して上昇オフセット周波数スペクトルとし、周波数下降部の周波数スペクトルからは減算して下降オフセット周波数スペクトルとし、両者のオフセット周波数スペクトルの差の差分周波数スペクトルを波形積分手段38で波形積分した積分周波数スペクトルの波形を基に移動物体検出手段39で前記物体の中から移動物体を検出し、両者のオフセット周波数スペクトルを加えた加算周波数スペクトルの波形を基に静止物体検出手段36で静止物体を検出する。
(もっと読む)
マイクロ波ドップラーセンサ
【課題】 前面にある障害物の影響を受けることなく高感度にかつ誤動作なく移動物体を検出できるマイクロ波ドップラーセンサを提供すること
【解決手段】 マイクロ波を生成する局部発振器11と、そのマイクロ波を放射する送信アンテナ13と、送信アンテナから放射されたマイクロ波の反射波を受信する受信アンテナ14と、受信アンテナから受信したマイクロ波と局部発振器から出力されるマイクロ波を混合する第1ミキサ12と、第1ミキサの出力と位相が90度異なる第2ミキサ18と、第1,第2ミキサのそれぞれの出力を2値化する各2値化処理部19と、それら両2値化処理部の出力からから動体を検出する動体検出判定部20を備える。動体検出判定部は、2値化処理部から出力される信号成分であるドップラー信号と雑音成分であるその他の信号とを検出し、信号成分と雑音成分から動体検出を行う。
(もっと読む)
定在波レーダおよび距離測定方法
【課題】 近距離でも、また、ターゲットとの相対速度が大きくても、定在波を用いてターゲットの位置を正確に測定できる定在波レーダおよび距離測定方法を提供する。
【解決手段】 発振周波数を掃引可能なVCO1に、一定電圧とアップ波形またはダウン波形の電圧との組合せを一周期とする同調電圧を印加して周波数を掃引するように制御する周波数シンセサイザ22が接続されている。アンテナ15から放射され、ターゲットMから反射した反射波と定在波は、相互に90°位相をずらして設けられる第1および第2の検波器16、20により検波され、位相識別手段21により、ドップラー信号がプラス(近づく)かマイナス(離反する)か、を判定し、それに応じてドップラーシフトがプラスになるように、CPU19から周波数シンセサイザ22に信号を送り、検波した定在波の距離情報からドップラーシフト量を引き算して、距離d0を求める構成になっている。
(もっと読む)
レーダシステム
本発明の実施の形態はレーダシステムに関し、特に地表に配置された対象を検知し追跡することに適した走査型レーダシステムに関する。ある実施の形態では、レーダシステムは走査型レーダシステムである。その走査型レーダシステムは、周波数発生器と、周波数走査型アンテナと、対象からの信号を受信して処理し、対象に伴うドップラー周波数を見出す受信器と、を備え、周波数発生器は、信号の組を複数生成し、その組はそれぞれ異なった特性周波数を有し、周波数発生器は、所与の特性周波数を持つ連続波信号を一連の変調パターンによって変調することで信号の組を生成するデジタルシンセサイザを含み、周波数走査型アンテナは、周波数発生器と協同して、発生された周波数に依存した角度範囲を有する領域に亘って放射を送受信する。したがって本発明の実施の形態は、精度良く周波数を生成し制御できるデジタルシンセサイザ技術と、受動的周波数走査技術及びドップラー処理技術を融合した。これにより、範囲および走査レートを正確に制御することが可能となり、対象の移動速度の早い遅いや信号対ノイズ比のような要素に対してレンジセルのサイズを最適化することが可能となり、したがって同様の電力を必要とする既知のシステムにおいて検知可能である距離よりもさらに大きな距離を隔てて位置する対象を検知することが可能となる。 (もっと読む)
501 - 520 / 647
[ Back to top ]