
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
301 - 320 / 647
波数推定装置
【課題】従来の波数推定装置では、目標の固有値と雑音の固有値との差が小さくなる低SNRの場合、誤った波数推定を行う問題があった。
【解決手段】目標からの反射信号を、アンテナのビーム指向方向に高利得を得るようビーム合成して、ビーム合成信号をパルス間積分し、パルス間積分信号から目標信号が検出された場合、目標からの反射信号の相関行列を相関行列算出手段で算出し、固有値・固有ベクトル算出手段で固有値・固有ベクトルを算出し、この固有ベクトルにより固有ビーム形成手段でビーム形成して、ビーム形成出力に対しコヒーレント積分手段がコヒーレント積分を行い、コヒーレント積分値を所定の基準で抽出して、波数推定手段で波数を推定する。
(もっと読む)
FM−CWレーダ装置

【課題】FM−CWレーダ装置において、レーダの受信信号に混入したインパルス状の干渉波をビート信号から除去する。
【解決手段】ビート信号を連続する3以上の被調整・注目・被調整スイープデータ列とし、被調整スイープデータ列の振幅と位相を前記注目スイープデータ列の振幅と位相に等しくなるようにそれぞれ調整して調整済スイープデータ列を得、調整済・注目・調整済スイープデータ列の対応するデータの中央値を出力用スイープデータ列とする。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】他のレーダ測定装置が近傍に存在するような環境においても、混信による影響を低減できるようにする。
【解決手段】送信部11は、周波数切替部32を制御して1周期ずつランダムな周波数のCW信号を発生させることで、ランダムな間隔で切替信号を発生させ、2種類の周波数の電波を、切替信号に基づいて、交互に切替えて送信する。受信部12は、送信された送信信号としての2種類の周波数の電波のうち、反射されてくる2種類の周波数の電波を、切替信号に基づいて、切替ながら受信し、受信した2種類の周波数の電波より受信信号を生成する。衝突予備動作用信号処理部13は、受信信号を、所定時間の間でサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
距離測定
距離測定装置DDMは、送信モードにおいて送信される電磁信号TBと受信モードにおいて受信される電磁信号の反射RBとの間の遅延に基づいて距離指標DVを提供する。距離測定装置は、電磁信号TBを送信するため及びその反射RBを受信するための複数のアンテナを含んでいるアンテナ・モジュールAMを含む。ビーム成形モジュールBFは、それぞれのアンテナに対するそれぞれの大きさ及び位相関係を定めて、2つの前述のモードのうちの少なくとも1つにおいて指向性アンテナ・パターンをアンテナ・モジュールAMに提供させる。好ましくは、ビーム成形及びステアリング制御モジュールBCは、方向コマンドDIRの関数として、それぞれの大きさ及び位相関係を制御する。三次元画像は、二次元画像中のそれぞれの部分のためのそれぞれの距離指標DVを取得するようにそれぞれの方向コマンドDIRを適用することによって形成されることができる。 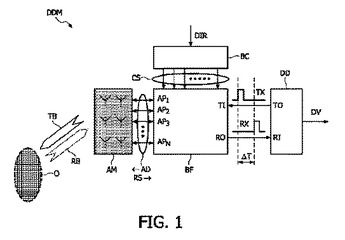 (もっと読む)
(もっと読む)
信号処理回路
【課題】不要波を送信する目標の距離を追跡する際、不要波の受信を高精度で検出でき、目標距離の追跡を行える信号処理回路を提供する。
【解決手段】反射波を含む電波を受信検波する送受信部と、レンジゲート、進みゲート、遅れゲート、2個の前段追加ゲート及び2個の後段追加ゲートを発生させるゲート発生部2と、これらのゲートを用いて抽出された受信信号を周波数解析して得たゲート情報に基づき目標距離の距離誤差を計算し、ゲート情報を記憶部に記憶する距離誤差計算部18と、前段追加ゲート及び後段追加ゲートの各信号レベルと閾値とを比較して不要波の受信を検出する不要波検出部17と、受信検出後不要波が消失するまでの時間を予測する時間予測部20とを備え、距離誤差計算部18は不要波の受信が検出される以前に計算したゲート情報を用いて距離誤差を計算する。
(もっと読む)
画像レーダ装置
【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
(もっと読む)
信号処理装置、レーダ装置、及び信号処理方法
【課題】アップ期間とダウン期間でピーク信号のレベルが一致する場合であっても、精度良くピーク周波数のペアリングを行う。
【解決手段】
周波数変調を施した第1のレーダ信号の周波数上昇期間に前記ビート信号の周波数スペクトルが極大値を形成する第1のピーク周波数と、前記第1のレーダ信号の周波数下降期間に前記ビート信号の周波数スペクトルが極大値を形成する第2のピーク周波数とを検出するピーク周波数検出手段と、所定周波数の第2のレーダ信号の送信時と受信時の周波数差に基づいて目標物体の相対速度を検出する速度検出手段と、前記相対速度が導出されるような前記第1、第2のピーク周波数のペアを抽出するペアリング手段とを有するので、ピーク周波数におけるビート信号のレベルがそれぞれ一致(または近似する)ピーク周波数をペアリングする場合であっても、精度良くペアリングを行うことができる。
(もっと読む)
レーダ装置
【課題】2個の受信機を用いモノパルス処理により測角を行う従来のレーダ装置は、ビーム幅内に目標が2個あると、2目標からの信号が位相情報を保持のまま加算されて受信されるため、各目標の振幅情報が失われ、正しい測角値が得られない。
【解決手段】目標からの反射信号を夫々のアンテナを介して受信し、アナログ/デジタル変換する複数の受信機と、各受信機で任意の同一時刻に受信された複数の受信信号と、前記時刻とは異なる時刻において、同時に各受信機で受信された複数の受信信号を用い、前記目標の振幅と、前記目標の位相と、前記同一受信機における異なる時刻間の前記目標の位相の変化量と、前記目標の角度で決定される空間位相を求め、この空間位相から前記目標を測角する測角処理装置を具備する。
(もっと読む)
レーダ装置
【課題】相対速度が0の物体があった場合でも、検出できるとともに、測定誤差を低減できるレーダ装置を提供することにある。
【解決手段】ランプ波形発生手段120A,120Bは、時間と共にその出力電圧が変化するランプ電圧を発生する。ランプ波形発生手段は、任意電流を発生する任意電流発生手段122と、任意電流発生手段が出力する電流を積分してランプ電圧を発生する積分手段124,126とを備える。スイッチ手段140は、ランプ波形発生手段120Bの出力と基準電圧とを交互に切り替えて出力する。合成手段150は、ランプ波形発生手段120Aの出力と、スイッチ手段140の出力とを合成する。高周波発生手段は、合成手段150の出力電圧を周波数信号に変換し、高周波信号を出力する。制御手段11は、任意電流発生手段122及びスイッチ手段140を制御する。
(もっと読む)
センサ端末及びセンサシステム
【課題】人の検知機能と検知データの送信機能を単一のユニットで効率的に実現することが可能なセンサ端末及びセンサシステムを提供する。
【解決手段】センサ端末は、例えばマイクロ波、光などのキャリアを使用して人などの物体の存在を検知し、センサ検出データを生成してメモリ部に一時的に記憶する。センサ通信部は、物体の存在を検知するセンサ機能と、外部との通信機能とを併せ持つ。制御部は、センサ検出データに基づいて物体の存在の有無を判定し、物体が存在するときには物体の検知を継続してセンサ検出データをメモリ部に記憶させる。一方、制御部は、物体が存在しないときには、センサ通信部を制御し、メモリ部に記憶されているセンサ検出データを送信する。よって、センサ通信部は1つの送受信デバイスを用いて、物体の検出と通信とを両立させることができる。
(もっと読む)
海洋レーダ局および海洋レーダ観測装置
【課題】観測可能な角度分解能を確保しつつ、設置場所を小さくする。
【解決手段】送信アンテナ21から海洋に向けて送信されたレーダ信号の反射波を受信した複数の受信アンテナ23からそれぞれ出力された受信信号Srxa〜Srxdに基づいて、表層海流の流速を算出する信号処理部25を備えている海洋レーダ局2A,2Bであって、信号処理部25は、各受信アンテナ23から出力される各受信信号Srxa〜Srxdの時系列データに対して距離分解用の1次フーリエ変換処理とドップラー周波数分解用の2次フーリエ変換処理とを実行して所定の等距離海域内の視線方向に沿った各流速に対応するドップラー周波数毎のパワースペクトルを算出し、算出した各受信信号Srxa〜Srxdの各パワースペクトルに対してCapon法を適用して、各ドップラー周波数fdを走査角に対応付けて算出する。
(もっと読む)
探査対象地表面からの高度が変動するアクティブ型側方監視センサの動作を最適化する方法
【課題】探査対象地表面からの高度が変動するアクティブ型側方監視センサの動作を最適化する方法を提供する。
【解決手段】この方法は、探査対象地表面からの側方監視センサの高度を連続的に測定するステップ(S10)と、前記探査対象地表面を走査するために前記側方監視センサから放射されている走査ビームに対して、前記側方監視センサが軌道上を一周している間の前記探査対象地表面の変動を減少させるように、測定により得られた前記側方監視センサの高度に応じて前記走査ビームをロール回転させる調節を施すステップ(S12)とを含む。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】周波数成分を平滑化してピーク周波数を求め、各ビート信号におけるピーク周波数のビート信号を用いて方位角を検出する場合に、誤検出を防止する。
【解決手段】 ピーク周波数検出手段が、ビート信号群の周波数成分を平滑化したときに極大値が形成されるピーク周波数を検出し、ビート信号抽出手段が、前記ビート信号群から、前記ピーク周波数を含むピーク周波数帯域における周波数成分の状態が所定の条件を満たすビート信号を抽出し、方位角検出手段が、前記抽出された抽出ビート信号のうち、第1の抽出ビート信号に含まれる前記ピーク周波数のビート信号と、第2の抽出ビート信号に含まれる前記ピーク周波数のビート信号との位相差に対応する方位角を検出するので、同一物体から得られたビート信号を用いて方位角検出ができる。よって、誤検出を防止できる。
(もっと読む)
物体検出装置
【課題】反射波信号のサンプリング時間が長い場合であっても、物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、ADコンバータ221から出力されるサンプリング時間ΔT毎の反射波信号を取得する受信信号取得部12と、周囲の物体の画像を撮像するステレオカメラ23を介して、物体との相対速度ΔVを検出する検出部13と、検出部13によって検出された相対速度ΔVから反射波のパルス間隔を求める間隔算出部15と、受信信号取得部12によって取得された反射波信号及び間隔算出部15によって求められたパルス間隔に基づいて、反射波の波形を求める波形算出部16と、求められた反射波の送信波に対する遅延時間を求める遅延時間算出部17と、求められた遅延時間に基づいて、物体との距離を求める距離算出部18と、を備える、
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
レーダ装置
【課題】他車両の数に応じて符号信号の符号長さを調節することのできるレーダ装置を提供する。
【解決手段】カメラで自車両の走行方向を撮像した画像を画像処理することにより他車両の数を計数し、計数した数に基づいて符号信号の符号長さと次数を決定する。決定した符号長さと次数で生成した符号信号を電磁波として空間に放射し、当該符号信号と受信部によって受信された信号との相関を演算することにより、他車両との相対距離などを対象物の情報として算出する。
(もっと読む)
移動体検出装置
【課題】異常を検出する検出回路を別途設けることなく異常検出機能をもたせることのできる移動体検出装置を提供する。
【解決手段】周波数faの送波信号を発振する第1の発振回路1aと、周波数fbの基準信号を発振する第2の発振回路1bと、超音波を送波する送波器3と、反射波を受波して受波信号を出力する受波器4と、送波信号又は基準信号の何れか一方の信号と受波信号とを混合することでドップラー信号を得る位相検波回路5と、位相検波回路5に入力される送波信号及び基準信号を切り換える周波数選択回路2と、ドップラー信号を信号処理して移動物体Oを検知して検出信号を出力する検知回路8と、移動体検出モード及び異常検出モードを有し、移動体検出モードでは送波信号を位相検波回路5に入力するとともに異常検出モードでは基準信号を位相検波回路5に入力するように周波数選択回路2を制御する制御回路9とを備えた。
(もっと読む)
アクティブセンサ
【課題】送信及び受信用アンテナを有し、電波を送受信して被検出体の存在を検知するアクティブセンサにおいて、送信用アンテナの半値角に基く検知エリア端における検知感度を向上させ、より正確に被検出体を検知する。
【解決手段】センサ1は、RF信号の電波を送信する送信用アンテナ12と、送信された電波の被検出体からの反射波を受信する受信用アンテナ13とを有し、電波を送受信して被検出体の存在を検知する。受信用アンテナ13の半値角θ2による受信エリア30内に送信用アンテナ12の半値角θ1による送信エリア20を配置し、半値角θ2を半値角θ1より大きくする。これにより、送信用アンテナ12の半値角θ1の送信エリア20の端における検知感度が向上する。
(もっと読む)
レーダ装置
【課題】従来の測距処理は処理対象となる受信信号での包絡線算出にフーリエ変換を行う場合、逆フーリエ変換も行う必要が生じ、演算量が多い。
【解決手段】空間に放射され、空間の物体で反射した波動を受信し、放射から受信までの時間で物体の距離を計測するレーダ装置であり、受信手段が受信信号に周波数変換して生成した中間周波受信信号から、中間周波信号最大値検出手段がその最大値を検出し、中間周波信号抽出手段でこの最大値の時刻を含む所定時間区間で抽出した中間周波信号から、2信号抽出手段が予め設定された時間間隔だけ離れた2つの中間周波受信信号値を抽出し、包絡線算出手段が、2信号抽出手段で抽出された2つの受信信号値から中間周波受信信号の包絡線を算出する。
(もっと読む)
301 - 320 / 647
[ Back to top ]