
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
321 - 340 / 647
ネットワーク化された波形システム
ある実施形態では、環境内の異なる地理的位置に配置された複数のレーダを含むネットワーク化された波形システムを提供する。複数のレーダは、ネットワーク波形信号を送信するように構成され得る。ネットワーク波形信号は複数のレーダ波形信号を含む。複数の波形信号のそれぞれは複数のレーダのうちの特定のレーダにより送信され得る。システムはプロセッサ及びメモリを有する、複数のレーダと一体となったコンピュータシステムを含む。メモリは、複数のレーダから受信したデータ、プロセッサにより処理されたデータ、及びプロセッサによって実行可能な処理コードを含む情報を格納するように構成される。処理コードは、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する命令と、ネットワーク波形信号に基づいて、環境の測定結果を判定するために複数のレーダからの出力データを統合処理する命令と、を含んでよい。 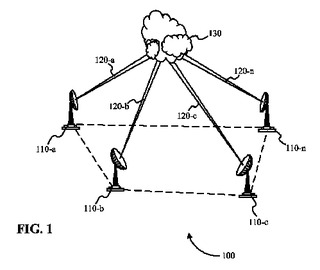 (もっと読む)
(もっと読む)
レーダ装置
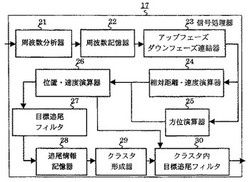
【課題】方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。
【解決手段】アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から前記複数の個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタとを備えた。
(もっと読む)
マルチスタティックレーダ装置

【課題】パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得る。
【解決手段】第1の受信ビデオ信号から目標とレーダとの相対速度を算出し、各時刻の相対速度から目標との初期相対速度、相対加速度を算出し、相関演算することにより生成された信号の目標までの距離が同一になるような速度補償量を目標とレーダとの初期相対速度、相対加速度を用いて算出し、速度補償量を用いて第2の受信ビデオ信号の位相を補償し、速度補償された第2の受信ビデオ信号を相関演算する。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とアンテナメインローブによるクラッタ周波数が重なる領域において、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外から出てくる待ち受け処理をするが、待ち受け処理中は目標もしくは誘導装置を搭載した飛しょう体自身が機動をし、ビーム領域外とならない限り目標信号を検出することができない。
【解決手段】 誘導装置のクラッタ実測値を使用してメインローブクラッタ電力と広がりを算出し、別途算出した目標信号電力とドップラ周波数を比較して目標の前方もしくは、後方のエネルギロスの少ない方へ誘導弾が回り込むよう、加速度指令値を計算する。
(もっと読む)
検知システム
【課題】検知システムにおいて、障害物等によって検知エリア内に死角が生じる場合であっても、検知領域を広げて1つのセンサで所望する領域内における動体を検知する。
【解決手段】本システム1は、センサ付照明器具2と、センサ付照明器具2から投射される送信波を反射する反射板3とを備える。センサ付照明器具2は、光源21と、送信波の対象物からの返信波により動体を検知するセンサ22と、センサ22による検知信号に基づき光源21の点灯制御を行う制御部23とを備える。光源21は、通路41略中央の天井部分に設置され、通路41全体を照明する。センサ22は通路41突き当りの壁面41cに設置され、送信波を通路41に沿って通路42の外方壁面42aに向けて投射する。反射板3は、曲がり角に設置され、センサ22からの送信波を通路42に沿って反射する。さらに反射板3は、通路42にいる人10からの返信波をセンサ22に向かって反射する。
(もっと読む)
パルスレーダ装置
【課題】従来装置は、連続した同じ周波数の送信パルスに対する受信信号に対して、MTI処理によりクラッタ抑圧処理を行うため、相対速度0m/secの反射物からのクラッタを抑圧できるが、低速移動目標の受信信号も抑圧し、検出性能が劣化する。
【解決手段】パルス繰り返し周期毎に周波数が重複なく所定周波数で変化するパルス列が、繰り返される送信信号を目標方向へ送信し、目標および背景よりの反射信号から送信パルスと同じ周波数を用いて、生成された受信ビデオ信号を用いてMTI処理により背景からのクラッタの抑圧をクラッタ抑圧器で行い、合成帯域器でクラッタ抑圧器による全ての周波数の記送信パルスに対するMTI処理後の信号を用いて、合成帯域処理を行い、検波器で、合成帯域器からの出力の振幅値を求め、合成帯域処理による目標の高分解能測距結果を出力する。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】プリクラッシュ安全装置用のレーダと、車線変更支援装置用のレーダとを共用できるようにする。
【解決手段】送信部11のアンテナ36は、第1の方向で、かつ第1の距離近傍の第1の範囲と、第2の方向で、かつ第2の距離近傍の第2の範囲とを含む範囲に電波を照射することにより送信信号を送信し、受信部12は、送信信号としての電波のうち、反射されてくる電波を受信して、受信した電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号を、第1の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ衝突予備動作制御部14を制御して衝突に備える動作を実行させ、車線変更警告用信号処理部15は、受信信号を、第1より長い第2の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ車線変更警告動作制御部16を制御して、車線変更の危険を警告させる。本発明は、車両安全装置に適用することができる。
(もっと読む)
レーダ装置、レーダ装置の信号処理方法及び、車両制御システム
【課題】方位ばらつきが大きい場合であっても、物標のトラッキングを精度良く行なうことができるレーダ装置を提供する。
【解決手段】互いに間隔が異なる三本以上の素子アンテナ15のうち、任意の二本の素子アンテナ対で受信された反射波の位相差から物標の方位候補を二つ算出する方位算出部と、方位算出部で算出された二つの方位候補の夫々についてトラキング処理を行なうトラッキング処理部と、誤差が小さい方の方位候補によるトラッキング処理の結果に基づいて物標情報を出力する物標情報出力部として機能するCPU11を備えているレーダ装置10。
(もっと読む)
目標検出装置
【課題】高速目標が小目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力データをコヒーレント処理周期(CPI;Coherent Processing Interval)毎にフーリエ変換するCPI毎FFT回路1と、CPI毎FFT回路によってフーリエ変換により得られたCPI毎の時間−周波数軸上の信号に対して最大値抽出または加算演算を実施するCPI間ビデオ積分回路2と、CPI間ビデオ積分回路の出力を2次元離散ウェーブレット変換する2次元DWT回路3とを備え、2次元DWT回路の出力に基づき目標を検出する。
(もっと読む)
水栓装置
【課題】使用者がセンサ部の検知範囲の近傍に物を誤って近づけた場合であっても、検知信号の周波数の変化の状況から、水栓装置を使用するための検知動作であることを的確に判定することができる水栓装置の提供。
【解決手段】吐水部30と、バルブ250と、センサ部100と、フィルタ部210と、判定部230と、判定部230からの信号に基づいてバルブ250の開閉を制御するバルブ制御部240とを備え、判定部230は、第1の周波数帯域に設けられた信号強度の閾値を検知信号の信号強度が超えたことを検知した後、第1の周波数帯域よりも低い第2の周波数帯域に設けられた信号強度の閾値を検知信号の信号強度が超えたことを検知し、その後に第1の周波数帯域に設けられた信号強度の閾値を検知信号の信号強度が超えたことを検知した場合には、吐水部30からの吐水を行う判定をする水栓装置。
(もっと読む)
目標検出装置
【課題】高速目標であっても目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】P通り(Pは正の整数)のパルス繰返し周波数(PRF:Pulse Repetition Frequency)の各々についてドップラ速度を算出し、該算出したP通りのパルス繰返し周波数のドップラ速度のうちのQ通り(Qは正の整数、Q≦P)のドップラ速度が一致した場合に、該ドップラ速度を目標速度と同定する速度同定回路1を備え、速度同定回路で同定された目標速度を用いて受信信号に所定の処理を施すことにより目標を検出する。
(もっと読む)
レーダ装置
【課題】時空間適応信号処理を適用してクラッタを抑圧する際、演算量の低減化、測距性能及びクラッタ抑圧性能の向上を図るレーダ装置を得る。
【解決手段】局部発振信号を生成する局部発振信号生成部2、局部発振信号を用いてパルスごとの送信周波数をステップ状に変化させた有限個のパルス信号を生成し繰り返し送信する送信部1、送信信号を空間に放射する送信アンテナ部3、目標に反射して到来するパルス状の反射電波を受信する受信アンテナ部4、受信信号のパルスごとに局部発振信号を用いて周波数変換及びI、Q位相検波を行って複素ビデオ信号を生成しAD変換して複素デジタルビデオ信号を出力する受信部6、複素デジタルビデオ信号を用いて高距離分解能化を図る合成帯域処理部7、高距離分解能化を図った信号に対しクラッタを抑圧する時空間適応信号処理部8、時空間適応信号処理部からの出力信号に基づき目標検出処理を行う目標検出部9を備える。
(もっと読む)
レーダ装置
【課題】レーダ装置で真上を通過しない目標の推定高度を算出する。
【解決手段】開示されるレーダ装置は、電波ビーム照射と反射波受信を行う空中線101と、空中線の方向を制御する駆動制御器102と、送信信号を発生しディジタル受信信号を出力する送受信器103と、受信信号の相関処理を行うパルスドップラ処理器104と、閾値と比較して目標信号を検出する目標信号検出器105と、電波発射時刻と目標信号検出時刻から目標の距離を計測する距離計測器106と、ビーム送信角度から目標の方位角を計測する方位角計測器107と、パルスドップラ処理結果から目標のドップラ周波数を計測するドップラ計測器108と、ドップラ周波数から目標の視線速度を計測する視線速度算出器109と、目標の距離,方位角,視線速度の計測値を遅延させる遅延器110と、計測結果と所定時間前の距離,方位角,視線速度値から目標の推定高度を算定する推定高度算出器111とを具える。
(もっと読む)
存在・動き検出用受動レーダー
受動検出器(10)は、環境中の受動的放射(12)を収集するよう構成された受信機(11)を含む。ここで、前記受動的放射の一部についての詳細な情報が受動的エネルギーのベースラインとして推定される。受動的エネルギーは、当該検出器と無関係の受動的源によって生成される。モニタ(24)が、ベースラインにおけるゆらぎを測定するよう構成される。ゆらぎが環境における存在または動きを表すかどうかを判定するために、モニタに判断モジュールが結合されている。検出方法も開示される。 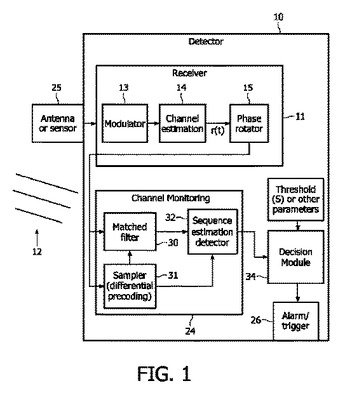 (もっと読む)
(もっと読む)
目標物体の検出および追尾を行うシステムおよび方法
【課題】目標物体の高度の計算を含む、目標物体の検出および追尾を行うシステムならびに方法を提供する。
【解決手段】受信機によって受信された信号の処理中に、このシステムは、送信機によってブロードキャストされた信号により形成される干渉効果パターンによって変更された信号から、目標物体の高度を計算するか、または、3以上の送信機に関連付けられた幾何学形状の計算およびそれらの形状の交点を求めることから、目標物体の高度を選択的に計算する。
(もっと読む)
レーダ装置
【課題】電波干渉に強い、つまり他のレーダからの干渉を受けにくくすることができるレーダ装置を得る。
【解決手段】送信信号の周波数を複数N種のステップ周波数に順次変調し、Nステップを1変調過程として複数M回の変調過程の周波数変調後の送信信号を送信波として目標物に照射するとともに、この目標物に反射された送信波のエコーを受信して得た受信信号を、変調過程の同一ステップ周波数に対応する受信信号をM回の変調過程にわたって周波数分析することで目標物の相対速度を算出するレーダ装置において、送信周波数が変わる毎に、送信信号を所定の符号系列に対応して位相変調を行い、受信信号を符号系列に対応して位相復調したのち周波数分析を行う。
(もっと読む)
マイクロストリップアンテナ及び高周波センサ装置
【課題】放射パターンの制御が容易なマイクロストリップアンテナ及びそれを備えた高周波センサ装置を提供する。
【解決手段】
送信波が供給される薄膜矩形状の給電素子と、前記給電素子の周囲に素子間スペースを介して配置され、前記給電素子により励起される薄膜矩形状の無給電素子と、前記給電素子と前記無給電素子とに対向して設けられた接地電極と、を備え、前記無給電素子の位相は、伝送線路が接続されるか、前記給電素子と異なる大きさにすることにより、前記給電素子の位相を基準としてプラス側に調整され、前記位相がプラス側に調整された前記無給電素子は、前記送信波を前記無給電素子の方向に傾けて放射させたときにアンテナゲインが略最大となる素子間スペースに配置され、且つ最大ゲインから3dB低下する半値角範囲が前記給電素子の主面に対して垂直な方向よりも前記送信波を傾ける方向側に局在するように配置されていることを特徴とするマイクロストリップアンテナが提供される。
(もっと読む)
手洗い装置
【課題】
水栓装置を利用する人が、差出す被洗浄物によっては水が出ない状態になる。
【解決手段】
本発明では、受水部の端部に電波センサを配置し、受水部内部の電波センサ近傍と、水栓装置の吐水口近傍とに検知エリアを配置し、その間に給水停止エリアを設け、手洗い装置を利用する際の手を差出す行為と、手を洗う行為を分割し、二つの検知エリアが、それぞれの行為に対応する被検知体を検知して水栓装置から給水を行う。また給水停止エリアが検知エリア間にあるため、水を必要としない行為に対して速やかに給水を停止することができる手洗い装置を提供することである。
(もっと読む)
津波監視装置
【課題】広い範囲で早期に津波を検出することができる津波監視装置を提供する。
【解決手段】航空機2に搭載され、基地局3からの検出指令に応じて津波の検出処理を実行する装置であって、基地局3と通信する通信手段11と、通信手段11が検出指令を受信した場合に、検出処理に関してあらかじめ設定された検出対象領域、撮像用パラメータおよび検出用パラメータを設定し、通信手段11を介して検出処理の結果を基地局3に送信する検出統制手段12と、検出対象領域において、撮像用パラメータを用いてSAR画像を取得するSAR画像取得手段13と、SAR画像中の各位置における波の速度を抽出し、この波の速度と検出用パラメータとに基づいて検出処理を実行する津波検出手段14とを備えたものである。
(もっと読む)
水栓装置
【課題】被検知体の動作変化を略静止を含む2つ以上の異なる状態に分別し、その状態間の時系列的な変化から被検知体とその動作状態を判定し、最適なタイミングで吐水を行うことができる水栓装置を提供する。
【解決手段】吐水部と、前記吐水部への水路を開閉するバルブと、放射した電波の反射波によって被検知体に関する情報を取得するセンサ部と、前記センサ部からの検知信号を所定の周波数帯域に分別する第1のフィルタ部と、前記分別された検知信号に基づいて前記吐水部からの吐水の可否を判定し、前記バルブの開閉を制御するバルブ制御部と、を備え、前記第1のフィルタ部は、第1の周波数帯域を有する第1のフィルタと、前記第1の周波数帯域よりも高い第2の周波数帯域を有するフィルタが少なくとも1つ設けられた第2のフィルタ部と、を有し、前記第1の周波数帯域には、被検知体の略静止状態を検知するための直流成分が含まれていること、を特徴とする水栓装置が提供される。
(もっと読む)
321 - 340 / 647
[ Back to top ]