
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
521 - 540 / 647
移動者検出装置及び方法

【課題】 自動車のような移動体においても、確実に人の接近を検出することができる移動者検出装置を提供すること。
【解決手段】 検出エリアへ電波を送信し、反射された電波を受信する送受信アンテナ2及び送受信回路3と、受信電波からドップラー波形を生成し、ドップラー波形から周波数特性を生成し、周波数特性における、人自体の移動速度と足や腕の動作速度の2つの周波数成分の有無から移動者を検出するドップラー波形処理回路4を備えた。
(もっと読む)
ドップラーレーダシステムの改良

本発明の実施形態はドップラーレーダシステムの改良に関し、周波数走査型レーダシステムとともに用いるのに適している。ある態様では、この改良は、周波数発生器の制御に用いられる周波数走査型レーダコントローラで具現化される。周波数発生器は、複数の信号セットを発生するように構成されている。各信号セットは異なる特徴周波数を有するとともに選択された速度で送信される複数の信号を含む。レーダコントローラは、搬送周波数に依存して速度を選択するように構成される。本発明は、パルス状レーダで具現化することもできる。各信号セットはパルス状信号のセットを含み、各パルス状信号は選択された繰り返し速度で繰り返される。レーダコントローラは、パルス状信号の特徴周波数に依存して繰り返し速度を変更するように構成される。代替的に、本発明は周波数変調レーダシステムで具現化することができる。各信号セットは一連の変調パターンを含む。レーダコントローラは、変調されている信号の特徴周波数に依存して所与の変調パターンを変更するように構成される。 (もっと読む)
マイクロ波ドップラーセンサ
【課題】 ドップラーセンサ自身の持つノイズや蛍光灯などの影響によるノイズの影響を受けることなく高精度に動体を検出することができるマイクロ波ドップラーセンサを提供すること。
【解決手段】 局部発振器11からの出力信号を送信アンテナ13から出射し、対象物20からの反射波を受信アンテナ14で受信する。出力信号は、第1ミキサ12に直接注入し、第2位相器17を介して第2ミキサ18に注入する。反射波は、第1位相器16を介して第1ミキサに入力し、第2ミキサへは直接入力する。各位相器は位相を90度遅らせる。動体からの反射波は、ドップラー効果により周波数変調されるので、各ミキサから混合信号として出力されるドップラー信号は位相差が180度生じる。第2ミキサによる混合信号を負帰還増幅器19を用いて局部発振器11で生成される信号を振幅変調する。ノイズ等の不要な振幅性雑音成分は位相差が生じないため抑圧される。
(もっと読む)
画像鮮明化装置、画像鮮明化方法、画像鮮明化プログラム、速度測定装置、速度測定方法、速度測定プログラム、画像鮮明度判定装置、画像鮮明度判定方法および画像鮮明度判定プログラム
【課題】 周囲に電波散乱体がある場合や、動揺(移動する)目標物の輝度が弱い場合などにおいても、SAR(Synthetic Aperture Radar、合成開口レーダ)により観測された目標物を鮮明に再生することを目的とする。
【解決手段】 SARの移動情報と目標物の予測移動情報とに基づいたSARと目標物との距離関係情報に基づき参照関数を生成する参照関数生成部142と、参照関数生成部142が生成した参照関数に基づき、レンジ圧縮後データをアジマス圧縮しアジマス圧縮後データを生成するアジマス圧縮処理部138とを備える。
(もっと読む)
位置特定装置、画像再生装置、位置特定方法および位置特定プログラム
【課題】 SAR(Synthetic Aperture Radar、合成開口レーダ)画像における移動する目標物の位置を算出することを目的とする。
【解決手段】 目標物のレンジ方向への移動速度であるレンジ方向速度を測定して記憶装置に記憶する速度測定部210と、速度測定部210が測定したレンジ方向速度に基づき、アジマス方向へのシフト量を算出して記憶装置に記憶するシフト量算出部220と、SARにより観測されたSAR再生画像を入力するSAR再生画像入力部222と、シフト量算出部220が算出したシフト量とSAR再生画像入力部222が入力したSAR再生画像の目標物の座標とに基づき、目標物の位置を特定して記憶装置に記憶する位置特定部224とを備える。
(もっと読む)
人体検知装置及び制御装置
【課題】一つのセンサで人体の位置及び状態を検知することができる人体検知装置を提供する。
【解決手段】人体との距離に応じたレベルの信号を出力するセンサ11と、センサ11の出力信号を、センサ11から所定の距離の第1の位置における人体の動きに応じた所定レベルの信号と比較することによって、前記第1の位置における人体の動きを検知する進退検知部3と、センサ11の出力信号を、第1の位置よりもセンサ11に近い第2の位置における人体の動きに応じた所定レベルの信号と比較することによって、人体が第2の位置に存在するか否かを検知する着座検知部2とを備え、進退検知部3は、人体が前記第1の位置より遠くから第1の位置を通過してセンサ11に近づくことを検知し、着座検知部2が人体の第2の位置への到達を検知したのち、人体の第2の位置からの離隔を検知した場合に、人体が第1の位置を越えてセンサ11から遠ざかることを検知する。
(もっと読む)
移動体検知装置及び移動体検知方法
【課題】外乱の影響を受けずに移動体を正しく検知する。
【解決手段】基準電圧生成部14は、検波器13が検波した検波信号S3の信号レベルを基準電圧値Vref0に加算し、コンパレータ15は、信号S2と基準電圧値Vrefとを比較して、パルス信号P1を出力する。カウンタ16は、パルス信号P1のパルス数をカウントしてトリガ信号P3をリトリガーブル・タイマ18に出力し、リトリガーブル・タイマ18は移動体検知信号P4を出力する。自走タイマ17は、パルス信号P1の出力が停止している場合、カウンタ16に、トリガ信号P3の出力間隔よりも長い間隔でリセット信号P2を出力する。雪等の外乱により、パルス信号P1の出力が間歇的となった場合、パルス信号P1がリセットされるため、リトリガーブル・タイマ18はHレベルの移動体検知信号P4を出力しなくなる。
(もっと読む)
ボール計測装置
【課題】天候や明るさの影響を受けにくく且つ精度よく弾道計測が可能なボール計測装置の提供。
【解決手段】打撃位置から着地位置までのボールの弾道、着地位置及び停止位置を計測可能なボール計測装置100である。このボール計測装置100は、上記弾道の計測が可能で且つ少なくとも一つの送信アンテナと複数の受信アンテナとを備えたミリ波レーダ装置1と、上記停止位置の計測が可能なCCDカメラ2と、上記複数の受信アンテナにより受信された信号に基づいてボールの三次元座標を算出するレーダ用演算部と、上記CCDカメラの画像データに基づいて上記停止位置の座標を算出するカメラ用演算部とを有している。ミリ波レーダ装置1とCCDカメラ2とは互いに異なる位置に設置されている。
(もっと読む)
目標物の位置測定方法および位置測定装置
【目的】 広角レーダ装置において測定誤差の度合を示す値を出力できる「目標物の位置測定方法および位置測定装置」を提供することである。
【構成】 広角レーダ装置において、目標物の現在位置、速度、移動方向に基づいて所定時間後の目標物の位置を予測し、ついで、所定時間後の目標物の位置を測定し、該予測点と測定点を用いて目標物の現在位置を決定し、該現在位置と前記測定点位置との差を累積して測定誤差の度合を示す値を出力する。現在位置を決定するに際して、測定点までの距離に応じた第1の重みと測定誤差の度合に応じた第2の重みを考慮し、予測点と測定点を用いて目標物の現在位置を決定する。
(もっと読む)
レーダー装置
【課題】 受信信号がミクサーに入る経路上に送信信号が漏れ込むことを防止することにより測定精度の向上の図られたレーダー装置を提供する。
【解決手段】 送信信号の一部を方向性結合器(DC)110において取り出し、可変減衰器(VATT)130及び可変位相器(VPH)150を用いて処理することにより、相殺信号を生成する。この相殺信号を低雑音増幅器(LNA)70の出力に結合器(COMB)160を用いて結合することにより、受信信号に含まれていた送信信号に基づく不要成分を相殺する。
(もっと読む)
動体検知システム
【課題】回路構成が簡単でかつ比較的安価に制作可能であり、人の素早い動作についても検出が可能である動体検知システムに関する技術を提供する。
【解決手段】電波のドップラー効果を利用して動体を検知する電波センサ1と、電波センサ1で検知して出力されたセンサ出力信号2を処理する信号処理装置21と、信号処理装置21から出力された警報出力信号8を受け警報を出力する外部機器9と、により構成される動体検知システム20であって、信号処理装置21が、電波センサ1から出力されたセンサ出力信号2を増幅する増幅部5と、増幅部5から出力された増幅信号6から判定までの遅延時間15を記憶する不揮発性メモリ10と、増幅信号6と前記遅延時間15経過までの状態監視を行い、信号変化の有無等の状態により警報出力信号8を出力する出力部13と、により構成される。
(もっと読む)
道路形状認識装置
【課題】 デリニエータが路側帯に存在しているか否かに拘わらず、現在の走行位置における道路曲率と前方の道路曲率とが異なっていたり、操舵にふらつきがあったりしても、正確に道路形状を認識することができるようにする。
【解決手段】 物体のドップラー速度と自車両の速度を比較して、当該物体が静止物体であるか否かを識別する静止物抽出部32と、その静止物抽出部32により静止物体であると識別されている物体の中から道路形状の推定に適している有効な静止物体を抽出する有効静止物抽出部36とを設け、その有効静止物抽出部36により抽出された物体の位置を道路形状推定式に当て嵌めて道路形状を推定する。
(もっと読む)
動いている物体を特定するためのコンピュータにより実現される方法
所定の周波数における信号を最初に送信することによって、動いている物体を特定する方法。未知の物体が信号を反射し、反射された信号が検出される。反射された信号の周波数が、未知の物体の動きに従って変調される。反射された信号から一般的特徴が抽出され、統計的分類器が、それらの特徴を用いて未知の物体を特定する。 (もっと読む)
レーダ装置
【課題】 2周波CWモノパルス方式のレーダ装置において、移動する人からの反射波はドップラ信号の周波数スペクトルに先鋭なピークを生じにくく検出しにくい。
【解決手段】 2つの受信部によりLチャンネル、Rチャンネルのドップラ信号を取得する。各チャンネルの2周波の送信波に対するドップラ信号からLチャンネルの距離情報350,Rチャンネルの距離情報352を取得する。周波数毎に両距離情報の差の絶対値354を求め、その絶対値が所定の閾値DErrを越える帯域358はノイズ信号を含むものとして除去し、物体からの反射波に基づくドップラ信号を含む有効周波数帯域を取得する。同様に、両チャンネルのドップラ信号に基づいて、反射波の到来する角度情報を送信周波数に対応して2種類取得し、それらの相関に基づいて有効周波数帯域を抽出する。取得した有効周波数帯域の情報に基づいて移動物体の検知、位置等の測定を行う。
(もっと読む)
飛行場用気象レーダ装置とその風観測運用方法と風観測システム
【課題】飛行場用として、降雨・非降雨にかかわらず、風観測を可能にする。
【解決手段】空中線装置15によりレーダパルスを放射して降雨エコーを受信し、信号処理装置11にてその信号強度から降雨状況を観測して、降雨状況に応じて降雨時観測モードと非降雨時観測モードを選択的に切り替える。ここで、降雨時観測モードでは、エコー成分を観測し、この観測結果から風向・風速を算出するものとし、非降雨時観測モードでは、受信信号を積算してSNを向上させ、ブラック散乱によるエコー成分を観測し、この観測結果から風向・風速を算出する。
(もっと読む)
移動物体検出装置
【課題】 ドップラ信号を利用する移動物体検出装置において、低速及び高速の移動物体をそれぞれ高精度に検出するために速度範囲別に周波数分析すると処理負荷が増大する。
【解決手段】 フィルタ部320,322はそれぞれ、受信信号から、移動物体の高速、低速の別に、対応する周波数帯域のデータを抽出する。高速対応のデータに関しては、所定の時間フレームにて得られるN個が合成部340に入力される。一方、低速対応のデータに関しては、高速対応のデータより長い時間フレームにて得られるデータを間引いてN個のデータを取り出し、合成部340に入力する。合成部340は、周波数シフト処理を行い、高速対応のデータの周波数スペクトルと重複しない領域に低速対応のデータの周波数スペクトルを移動させる。しかる後、両速度域のデータを互いに加算し、得られたN個のデータを用いて周波数分析を行う。
(もっと読む)
車両の周辺監視装置
【課題】 レーダ装置を駐車支援と追突検知に兼用しながらも、運転者が意識しなくとも様々な状況下でレーダ装置から必要な出力信号を適切に獲得できる車両の周辺監視装置を提供する。
【解決手段】 車両外部へ向けて検出電波を発信する発信手段1と、外部物体からの反射電波を受信する受信手段2と、検出電波と反射電波に基づいて外部物体を検出する信号処理手段3とを備えたレーダ装置4と、前記レーダ装置4を駐車操車時の支援モニタとして動作させる駐車支援モードと走行操車時の追突検知モニタとして動作させる追突検知モードの何れかの動作モードに切替設定するモード設定手段5を備えた車両の周辺監視装置であって、前記モード設定手段5は、運転姿勢データや車速データ等に基づく車両状態データに基づいて前記レーダ装置を駐車支援モードと追突検知モードの何れかに設定する。
(もっと読む)
目標検出装置
【課題】目標検出性能を向上させることができる目標検出装置を提供する。
【解決手段】入力された信号を短時間フーリエ変換によって時間−周波数軸上の信号に変換して出力する短時間フーリエ変換部1と、短時間フーリエ変換部から得られた時間−周波数軸上の信号に対して2次元離散ウェーブレット変換を施す2次元離散ウェーブレット変換部2と、2次元離散ウェーブレット変換部から得られるウェーブレット展開係数に基づき目標を検出する検出部6とを備えた。
(もっと読む)
定在波レーダおよび距離測定方法
【課題】 ターゲットに相対的な移動があって定在波信号にドップラー信号が重畳されていても、とくに近距離においてもドップラーシフトを除去し、正確な距離を測定することができる定在波レーダおよび距離測定方法を提供する。
【解決手段】 周波数制御回路5により同調電圧が印加されて周波数掃引されるVCO1と、そのVCOにより発生する電磁波を発射すると共に、ターゲットMで反射した反射波と進行波とで形成される定在波を受信するアンテナ2と、受信した定在波を検波する検波器3と、信号処理手段4とによりターゲットまでの距離を測定する定在波レーダにおいて、特定の周波数にタイミングを合せて検波信号をサンプルホールドするサンプルホールド手段6が設けられ、その信号によりドップラーシフトを求めて定在波検波信号の周期から相殺することにより、アンテナとターゲット間の距離を求めるように構成されている。
(もっと読む)
確率質量拡散によるモデルセットの適応
少なくとも1つのパラメータの一連の測定z,R;M;(t1,t2)を実行し且つ予測を再帰的に実行する方法。その方法は、少なくとも第1の測定インスタンス(M(tk);(k))に基づいて、少なくとも2つのモデル(C,S)に対する結果(x,P)を予測する工程と、次の測定インスタンス(M(tk+Tp)(k+Tp))の後、対応する時点に対するモデル(C,S)を更新し、これにより第1の測定インスタンスに基づいて行なわれる予測が次の測定インスタンスを考慮して更新される工程と、次の測定インスタンス(tk+Tp)(k+Tp)に対する少なくとも1つのモデル(C,S)を再配置し、これにより一方の更新モデルが他方の更新モデルに影響を及ぼす工程とを有する。少なくとも1つの補完(C)モデル及び少なくとも1つのサブ(S)モデルを含むモデルセットの場合、再配置の工程において、SモデルがCモデルに影響を及ぼすことはない。排他的な補完(L,N,R)モデルを含むモデルセットの場合、再配置の工程において、モデルセット(L,N,R)内のモデルの所定の対に対して、より高い確率(μ)を有するモデルはより低い確率を有するモデルに影響を及ぼすが、より低い確率(μ)を有するモデルがより高い確率を有するモデルに影響を及ぼすことはない。 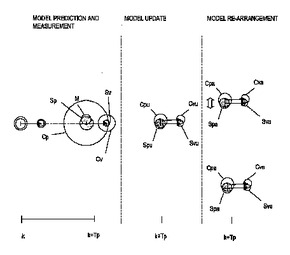 (もっと読む)
(もっと読む)
521 - 540 / 647
[ Back to top ]