
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
561 - 580 / 647
電波レーダ装置及び車間距離制御装置

【課題】2周波CW方式を用いた電波レーダにおいて、相対速度0状態においても、前方車の距離検知を可能とし、安定したACC追従走行を実現する。
【解決手段】2周波CW方式と他の変調方式(周波数パルスCW方式、もしくはFM−CW方式)を組み合わせることで、相対速度がある時は、2周波CW方式、相対速度0付近の状態では周波数パルス方式を混在させて、相対速度0でも前方車の反射波から得られるIF信号を発生させて、ACC対象車両の存在を検知し、安定したACC追従走行を可能とする。
(もっと読む)
干渉型レーダ

【課題】 受信アンテナによる空間分解能を上げずに、感度を向上させた干渉型レーダを提供する。
【解決手段】 目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する大口径アレイアンテナを備えた受信部Rとを有している。前記送信部Tは、目標対象物の方位及び距離を検出するためのFMCW信号を送信アンテナから出力する機能を有している。前記受信部Rは、前記大口径アレイアンテナ2を複数の等しい小ブロックに分割した干渉ブロック9c毎に受信する受信信号に相関処理を行う複数の相関処理部15と、前記複数の相関処理部15から出力される信号の相等しい信号成分同士をベクトル合成する合成器19とを含んでいる。
(もっと読む)
マイクロウエーブセンサ
【課題】 簡単な構成によって、風によって揺れている草木などと侵入者などの検知対象物体とをより的確に識別可能とすることで、誤報を極力防止するとともに動作の信頼性を高めたマイクロウエーブセンサを提供する。
【解決手段】 検知された検知対象物体までの距離の単位時間当たりの変化量を移動距離として計測する移動距離計測手段と、この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備える。
(もっと読む)
ドップラ効果を用いた速度計測方法及びドップラ速度計
【課題】ドップラ速度計で、被計測物体へ向けて送信する出力波の周波数が低い場合であってもドップラ周波数を増大させることができ、高分解能で速度を検出可能とする。
【解決手段】被計測物体Wに向かって送信波を送信すると共に、該送信波を周波数逓倍したものを基準波としておき、前記送信波が被計測物体で反射されたものを受信波として受信した上で基準波と同一逓倍率nで周波数逓倍して、基準波と周波数逓倍された受信波との周波数差から求められるドップラ周波数nfdから被計測物体の速度vを算出する。
(もっと読む)
レーダ信号処理装置及びドップラ気象レーダ
【課題】 降水エコーのドップラ速度が0m/s付近に集中している場合でも、降水エコーの減衰を招くことなく、地形エコーを除去することができるようにする。
【解決手段】 地形エコーの除去比SCR/速度幅W/速度Vと地形エコー有無判定用のスレッショルドを比較し、それらの比較結果から地形エコーが含まれているか否かを判定する地形エコー有無判定部15を設け、その判定結果が地形エコーが含まれている旨を示す場合、CMTI処理部16により地形エコーが除去されたIQデータを選択し、その判定結果が地形エコーが含まれていない旨を示す場合、地形エコーが除去される前のIQデータを選択する。
(もっと読む)
速度測定装置
【課題】 速度測定装置を低消費電力化する。
【解決手段】 速度検出部20により、マイクロ波を放射すると共に反射したマイクロ波を受波し、受波したマイクロ波から速度に対応する情報を検出する。道路情況推定部21により、速度検出部20の検出結果を参照し、測定対象道路の情況を推定する。道路情況推定手段21の推定結果を参照し、測定対象道路の情況に対応させて速度検出部20を間欠的に駆動する。速度検出部20を間欠的に駆動することにより、低消費電力化が可能となり、その間欠的な駆動を道路の情況に対応させることにより、速度測定が不完全になることを防止できる。
(もっと読む)
レーザレーダ装置
【課題】 基準目標を設けることなく、気象条件の変化にかかわらず、良好な信号雑音比を保持し、高精度な後方乱気流の検出を実現する。
【解決手段】 航空機の飛行経路区間に設けられた観測領域内にレーザ光を放射してその反射光を受信する光送受信部と、この光送受信部から出力された受信信号を複数の異なる積分数にて積分処理し、前記積分数毎に前記光送受信部から出力された受信信号の信号雑音比を算出する信号雑音比算出処理部とを備え、この信号雑音比算出処理部により算出された複数の信号雑音比の中から予め定めた条件を満たす信号雑音比を算出した積分数により前記光送受信部から出力された受信信号を積分処理して航空機の通過により発生した後方乱気流を検出する。
(もっと読む)
ローカル測位用の改良レーダシステム
本発明の測位システムは、1又は複数の能動ランドマーク及びデバイスを備える。デバイスは、偏波を有する電磁パルスを送信し、或る期間にわたってリターン信号を受信する。デバイスは、偏波を有するリターン信号を優先的に受信することができる。リターン信号は、少なくとも1つの能動ランドマークからの少なくとも1つのリターン被変調パルスを含む。デバイスは、リターン信号からリターン被変調パルスを分離して、デバイスから能動ランドマークまでの距離を求めるように、リターン信号を処理する。デバイスは、オプションとして、リターン信号を受信している間、特定の方向に移動し、リターン信号のリターン被変調パルス部分におけるドップラーシフトを検出し、特定の方向と、デバイスと能動ランドマークとの間の直線との間の角度を求める。 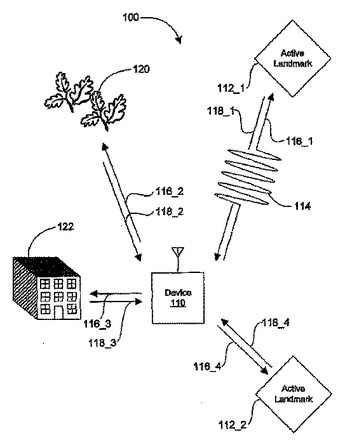 (もっと読む)
(もっと読む)
パルスレーダー装置
【課題】
本願発明は、スイッチングパルスによるノイズに起因した誤動作を防止することができるパルスレーダー装置を提供することを目的とする。
【解決手段】
上記目的を達成するために、本発明は、送信パルスを変調した送信パルス波を送信する送信部及び測定対象物で反射した前記送信パルス波の反射波を受信して復調した受信パルスを生成する受信部を含むレーダーモジュールと、直流電力をスイッチングパルスのオン・オフによりスイッチングして前記レーダーモジュールへの駆動電力を生成するスイッチング電源と、前記スイッチングパルスの立ち上がり時からの所定期間を除く前記スイッチングパルスのオン時又は前記スイッチングパルスの立ち下がり時からの所定期間を除く前記スイッチングパルスのオフ時に前記送信パルス波の送信から前記受信パルスの生成までが完了するように、前記送信部の動作を制御する制御部と、を備えるパルスレーダー装置である。
(もっと読む)
障害物検知センサ
【課題】本発明は、状況に応じて、適切に感度を調節することが可能な障害物センサを提供することを目的とする。
【解決手段】 所定の周波数の電磁波を送出し、障害物により反射された前記電磁波の反射波を検出して、前記障害物の速度に応じた周波数の信号を出力するドップラーセンサ2と、前記ドップラーセンサ2の出力信号を受け取り、当該出力信号を周波数帯域毎に異なる増幅率で伝達する信号処理部(3乃至5)と、前記信号処理部(3乃至5)の出力信号を受け取り、当該出力信号の信号強度に基づいて前記障害物の有無を検知する検知部(6、7)と、から構成される。
(もっと読む)
便器洗浄装置
【課題】 ドップラーセンサによって人体検知及び便器内の水流検知を行なう便器洗浄装置において、ドップラーセンサによる電力消費を低減すること。
【解決手段】 送信した電波の周波数とその反射波の周波数の差分から差分信号を生成するドップラーセンサと、人体及び便器内の流水を検知対象とした検知制御を行なう制御手段と、を備え、制御手段は、検知対象に応じた周期で、ドップラーセンサから電波を間欠送信させて、検知制御を行なう。また、制御手段は、検知対象に応じた周期で、ドップラーセンサからの電波送信のオン時間を変更する。
(もっと読む)
人体検知装置及び制御装置
【課題】一つのセンサで人体の位置及び状態を検知することができる人体検知装置を提供する。
【解決手段】 マイクロ波センサ11から出力される、人体の位置で強度の異なる周波数信号を、可変ハイパスフィルタ13、コンパレータ14、カウンタ15、ラッチ17、制御部21等で処理し、得られた情報に基づき、制御部21は、便蓋開閉装置22等に所定の制御信号を送信する。
(もっと読む)
自動吐水制御装置における吐水制御方法
【課題】 少なくとも水栓機構付近に手が存在する間は、確実に吐水を継続させることができる的確な吐水制御を行なえるようにする。
【解決手段】 コントローラ部9は、マイクロ波センサ7から出力されるドップラ信号に基づいて、手35が空間領域に進入したか否か判断し、手35が存在すると判断したら、バルブ開の制御信号を出力することによってバルブ5を開動作させ、水栓機構3から吐水口3cを通じて水を吐水させる。マイクロ波センサ7から出力されるドップラ信号に基づいて、飛散水の散乱が存在するか否か判断し、飛散水の散乱が存在すると判断したら、手の洗浄動作が継続されているものと認識して、バルブ5の開状態を保持させることにより、水栓機構3から吐水口3cを通じた水の吐水を継続させる。
(もっと読む)
ハイドロプレーニング状態判定装置
【課題】
湿潤路を走行中に車輪と路面との接触が断たれ、ハイドロプレーニングが発生したことを正確に判定する。
【解決手段】
送信波を送信する送信機能と、前記送信機能で送信した送信波の反射波を受信する受信機能と、前記送信機能から送信する送信波を車輪の後ろの路面に送信し、送信波の路面からの反射波を前記受信機能で受信して、ハイドロプレーニングの発生状態を判定するハイドロプレーニング状態判定機能とを備えたことを特徴とするハイドロプレーニング状態判定装置。
(もっと読む)
レーダー装置
【課題】 受信系の構成を複雑化することなく、移動目標に対する測角精度を向上させたレーダー装置を提供する。
【解決手段】 移動体に搭載され、レーダー波を送信するとともに、指向性を有する空中線4を介して移動目標による反射波を受信し、受信信号に基づいて空中線4の指向方向を制御するレーダー装置1であって、受信信号を復調し、ビデオ信号を生成する受信機5と、移動体の移動速度に基づいて、移動体の移動によるビデオ信号の位相変動を補償する自機運動補償回路6と、受信信号に基づいて移動目標のレンジ方向に関する速度成分を求め、移動目標の移動によるビデオ信号の位相変動を補償する目標運動補償回路8と、各運動補償回路による位相変動補償後のビデオ信号に基づいて、ドップラー周波数を推定するドップラー周波数推定回路9と、ドップラー周波数に基づいて、移動目標の方位を判定する測角回路10により構成される。
(もっと読む)
レーダ装置
【課題】 予め運動を想定することが困難な高機動目標に対する検出性能を改善することのできるレーダ装置を得る。
【解決手段】 ピーク信号に相当する相対速度を選択信号相対速度計測手段103で計測し、この相対速度に基づいてコヒーレント処理が可能な時間間隔毎の位相変化量を選択信号位相変化量算出手段104で算出する。更に、位相変化量を用いてピーク信号の位相を選択信号位相補償手段105で補償し、この補償後の位相と、ピーク信号の振幅値とから位相補償されたピーク信号を信号再構成手段107で再構成する。次に、積分手段108で、再構成されたピーク信号を加算し、この加算信号を閾値と比較して目標の有無を判定する。
(もっと読む)
移動速度検出装置
【課題】車両等に搭載された移動局の移動速度を簡単且つ確実に求めることが可能な移動速度検出装置を提供する。
【解決手段】車両等に搭載された移動局21が発射する電波の周波数Foが周囲の構造物22、23により反射される電波をアンテナ101および受信機102で受信し、周波数変換部103で周波数変換し、A/D変換部105でデジタル変換し、データバッファ108に一時格納する。このデータをTFT処理部109で高速フーリエ変換し、TH検出処理部110で所定閾値以下のデータを除去して、周波数偏移算出部112で最大ドップラ周波数Fmaxおよび最小ドップラ周波数Fminを求め、これらFmaxおよびFminに基づき速度成分検出部113で移動局の移動速度を算出する。
(もっと読む)
レーダ装置
【課題】 相対速度に依存せずに安定して距離計測を行う。
【解決手段】 目標物に対する相対速度及び距離を計測するレーダ装置であって、前記相対速度が大きい場合に適した方法で相対速度及び距離を計測する第1の計測手段と、前記相対速度が小さい場合に適した方法で相対速度及び距離を計測する第2の計測手段と、前記第1の計測手段と第2の計測手段とを相対速度の大きさに基づいて切り替える制御手段とを備え、該制御手段は、所定の閾値と相対速度とを比較し、相対速度が閾値より大きければ前記第1の計測手段を選択し、相対速度が閾値以下であれば第2の計測手段を選択する、という手段を採用する。
(もっと読む)
移動目標検出装置
【課題】 複数個の受信アンテナを用いてレーダ波の送受信を行い、周波数と時間の2次元空間上でドップラーフィルタを形成して、車両、船舶等の低速移動目標を検出する移動目標検出装置が、容積が大きく、信号処理部で受信したビデオ信号をアナログ/ディジタル変換処理をするため、計算処理負荷が増大するという問題があった。
【解決手段】 複数個ある受信アンテナ3のうち一部の受信アンテナ3を、他の受信アンテナ3の間隔と異なる間隔で配置して、この受信アンテナ3を他の受信アンテナ3へ切換器を介して切り替えることにより受信部5を共通化することで、各受信アンテナ3毎に受信部5を設ける必要がない移動目標検出装置とする。
(もっと読む)
レーダ装置
【課題】 目標の重要度に応じたビーム分配により探知と追尾を同時に行うことで両者の性能を向上させたレーダ装置を提供する。
【解決手段】 探知された目標の航跡が追尾すべきTBMなどの移動体の航跡に合致する度合いに応じて、追尾に割り当てるビーム数を決定するための重要度を求める重要度算出器8と、重要度に応じて探知と追尾にそれぞれ割り当てるビーム数を算出するビーム分配数算出器10と、ビーム分配数算出器10が算出した分配数に従って探知及び追尾のビーム割り当てを制御するビーム制御部9とを備える。
(もっと読む)
561 - 580 / 647
[ Back to top ]