
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
481 - 500 / 647
無線ローカリゼイション装置および方法
デバイスのロケーションは、別のデバイスに対して決定されることができる。例えば、ロケーティングデバイス(102)は、それがターゲットデバイス(104)に対して少なくとも1つの距離を測定するとき、動くことができる。ロケーティングデバイスは、そのあと、測定された単数の距離あるいは複数の距離に関連する1以上のインジケーションを生成することができる。ロケーティングデバイスは、さらに、ターゲットデバイスに対する1以上の決定された方向を関連づける1以上のインジケーションを生成することができる。ターゲットデバイスは、ターゲットデバイスのロケーションを決定するために、あらかじめ決定された方法で、動くことができる。デバイスの各々は、ロケーション決定オペレーションのために、単一のトランシーバ(208、212)および単一のアンテナ(210、214)を使用することができる。 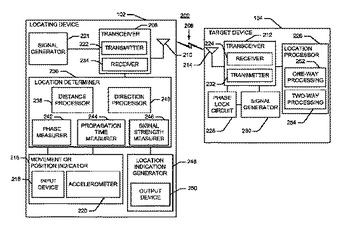 (もっと読む)
(もっと読む)
電波探知装置および方法

【課題】前方の探知対象物の誤探知を低減できるようにする。
【解決手段】例えば、モノパルス式レーダは、最初に、広角送信アンテナからの送信信号に対する受信信号が受信された場合(S1乃至S3YES)、その受信信号から角度を演算し、その角度に基づいて前方ターゲットの存在可能性があるか否かを判定する(S4,S5)。存在可能性があると判定した場合、モノパルス式レーダは、広角送信アンテナよりも指向性の半値角が狭角の狭角送信アンテナに切り替え(S6)、狭角送信アンテナからの送信信号に対する受信信号から角度を演算し、その角度に基づいて前方ターゲットを探知したか否かを判定する(S7乃至S10)。そして、前方ターゲットを探知したと判定した場合、モノパルス式レーダは、ターゲット探知信号を出力する(S11)。本発明は、モノパルス式レーダに適用可能である。
(もっと読む)
移動物体検知装置

【課題】ドップラ信号を利用する移動物体検出装置において、センサ直近を落下する雨滴等のノイズ源によって移動物体の検知性能に大きな影響を与える。
【解決手段】三つの異なる周波数の電波を送受信して得られるドップラ信号間で二つのドップラ差信号を求める。得られたドップラ差信号間の位相差から移動物体に基づくドップラ周波数を抽出し、得られたドップラ周波数における振幅値と位相差から距離値を求める。得られた距離値と振幅値に基づき、移動物体の検出を行う。
(もっと読む)
MTI装置及びMTI処理方法
【課題】運用者の操作負担を軽減しつつ、消え残りクラッタ信号を低減することが可能なMTI装置及びMTI処理方法を提供する。
【解決手段】所定の処理周期毎に出力される複数のMTI信号をそれぞれ加算し、該複数のMTI信号の数で除算するスキャン積分処理を実施し、スキャン積分処理後の信号から所定のスレッシュホールドレベルを超える信号を消え残りクラッタ信号と判定する。そして、該消え残りクラッタ信号の計数結果である消え残りクラッタ信号数が所定の上限値以下となるように、マルチドップラフィルタ回路のフィルタ特性を変更するためのフィルタデータを生成し、マルチドップラフィルタ回路のフィルタ特性を変更する。
(もっと読む)
測位用信号受信装置
【課題】安価な移動体検出機能を備えた測位用信号受信装置を提供する。
【解決手段】測位用信号受信装置10において、測位用アンテナ12は、測位用衛星からの測位用信号を受信する。局部発振器26は、局部発振信号を生成する。検出用アンテナ34は、局部発振信号を放射するとともに、放射された局部発振信号の反射信号を受信する。ミキサ回路16は、入力された信号と局部発振信号とを混合することにより中間周波信号を生成する。測位用アンテナ電源制御部44、スイッチ制御部46は、ミキサ回路16へ入力される信号を、測位用信号と反射信号とで切り替える。位置算出部48は、ミキサ回路16に測位用信号が入力されたときに出力される中間周波信号に基づいて、測位用信号受信装置10の位置を求める。移動体検出部50は、ミキサ回路16に反射信号が入力されたときに出力される中間周波信号に基づいて、測位用信号受信装置10付近の移動体を検出する。
(もっと読む)
レーダ装置及び画像処理方法
【課題】信号のドップラー周波数変化量Δfによって決まる分解能以上に、目標散乱点を検出できる合成開口レーダ装置を得る。
【解決手段】本発明のレーダ装置は、画像の再生基準となる参照関数と観測データとを周波数領域で乗算し、時間軸に戻して再生画像を得る構成において、上記参照関数の時間経過と設定スレショルド値との比較で得られる所定時間からの経過値であるシフト量を算出するシフト量算出部15と、上記観測データを周波数処理した観測スペクトラムを時間軸に戻し、かつ得られた上記シフト量だけずらせて加算して加算信号を得るシフト加算部16a,16bと、を備えて、上記シフト加算部で得られる差分画像信号を上記再生画像と乗算して高分解能再生画像を得るようにした。
(もっと読む)
自動車用前方監視センサ
【課題】車両環境において物体を精度高く検出することができる前方監視センサを提供する。
【解決手段】ランプ・アップ部分およびランプ・ダウン部分の少なくとも1つを含むVCO制御信号を結合する入力ポートと、送信アンテナに結合するために送信RF信号を供給する出力ポートとを有する電圧制御発振器(VCO)と、送信RF信号に比例するフィードバック信号を結合する第1入力ポートと、固定周波数基準信号を結合する第2入力ポートと、フィードバック信号および固定周波数基準信号間の位相差および周波数差の少なくとも1つに比例する誤差信号を供給する出力ポートとを有し、VCO制御信号が誤差信号の関数であり、ランプ・アップ部分およびランプ・ダウン部分の内少なくとも1つが実質的に線形な傾斜を有する、線形化回路とを備える。
(もっと読む)
測定装置および方法
【課題】2周波CW方式による距離測定の信頼性を向上させるようにする。
【解決手段】測定装置1は、自身と測定対象物2との間の距離Lを求めるために、2周波CW方式による距離測定のみならず、次のようなAM位相差方式による距離測定を実行する。即ち、AM位相差方式とは、送信信号SsのAM包絡線AMsと、受信信号SrのAM包絡線AMrとの位相差を利用することで、測定装置1と測定対象物2との間の距離Lを求める方式である。そして、測定装置1は、2周波CW方式に従って演算された距離と、AM位相差方式に従って演算された距離とに基づいて、最終的な測定結果としての距離を決定する。本発明は、距離測定装置に適用可能である。
(もっと読む)
目標航跡相関装置及び目標航跡の相関判定方法
【課題】各センサから得られる複数の目標速度がほぼ同一の場合においても誤相関を軽減できるようにした目標航跡相関装置を提供する。
【解決手段】複数のセンサの各々により得られる目標に関する複数の航跡情報が同一の目標に関する情報であるか否かを判定する目標航跡相関装置において、各センサが求めた目標の追尾速度ベクトルのなす角度を算出する目標追尾速度ベクトル差算出器と、前記センサにより得られる航跡情報の誤差を追尾回数毎及びセンサ毎に予め設定しテーブル化した追尾誤差テーブルと、前記航跡情報の誤差に基づいて、前記目標の追尾速度ベクトルのなす角度の相関しきい値を設定するしきい設定器と、前記目標の追尾速度ベクトルのなす角度と、前記相関しきい値とを比較して、前記複数の航跡情報が同一の目標に関する情報であるか否かを判定する航跡相関判定器とを備えるようにした。
(もっと読む)
レーダ観測システムとそのパラメータ最適化方法
【課題】 MTI調整において、最適な信号処理パラメータを迅速に導出可能にする。
【解決手段】 パラメータ自動設定部12とレーダ観測データ蓄積部14を用いて、オンライン状態で短時間に設定パラメータを複数回変更して、それぞれの観測データを時刻管理して蓄積しておき、オフライン状態で、保存した評価用データとパラメータ設定情報を選択的に読み出して複数のパラメータそれぞれの評価を行い、その評価結果を比較することで最適な信号処理パラメータを導出するようにし、MTI調整において、複数回のパラメータ変更とその評価処理を切り分けて処理する。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とメインローブクラッタのドップラ周波数が重なる領域では、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外に出てくる待ち受け処理をするが、待ち受け処理中は、目標又は誘導装置を搭載した飛しょう体が機動をしてビーム領域外とならない限り目標信号を検出できない。
【解決手段】 誘導装置のアンテナパターン及びクラッタ実測値を使用してメインローブクラッタ電力を算出し、別途算出した目標信号の電力と比較して、真に目標が検出困難なメインローブクラッタの角度範囲を算出する。これにより目標接近による目標信号電力の上昇及び実際のクラッタ状況に応じてメインローブクラッタ周波数範囲を狭くするものとした。
(もっと読む)
小便器洗浄装置及び小便器洗浄システム並びに給水装置
【課題】マイクロ波ドップラセンサを用いた小便器洗浄装置が複数隣接して設置された場合に、小便器洗浄装置同士の影響を低減すること。
【解決手段】ドップラ信号に基づいて人体検出又は尿流検出を行い、ボール部内に洗浄水を供給する小便器洗浄装置において、ドップラ信号に基づいて人体検出又は尿流検出を判断するために必要な期間を複数に分割しそれぞれの期間を第1期間とし、この第1期間内に第1期間の始まり時点から所定時間遅延させる第2期間を設け、この第2期間経過後にマイクロ波ドップラセンサを所定サンプリング周期でn回(nは2以上の整数)間欠動作させ、しかも、第2期間を第1期間毎にランダムに変更するようにした。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、レーダ装置で干渉信号を感知したときのみ、干渉信号の対策が可能であるが、レーダ装置で感知できない場合にはその対策を行うことはできなかった。
【解決手段】 ESM部によって、干渉信号を受信し、信号処理することにより、レーダ部の受信帯域およびその近傍に干渉信号が存在するか否かを検出し、その結果から、干渉信号の影響を受けているものと判断可能である場合に、レーダ信号処理器経由で励振機の発振周波数を、干渉信号の影響を受けない送信周波数帯域でレーダ動作を継続するとともに、ESM部で検出した干渉信号の入力タイミングに同期して、可変減衰器18で電力レベルを低減させるようにしたものである。
(もっと読む)
飛しょう体及び飛しょう体誘導システム
【課題】 地上や車両等に設置された誘導管制装置が、複数ある目標を弁別することが困難な状況であっても、複数の飛しょう体は、複数ある目標のそれぞれ異なる目標に向けて誘導される飛しょう体を得る。
【解決手段】 この発明による飛しょう体は、目標を捜索するシーカと、他の飛しょう体との間で捕捉した目標の位置や速度等の情報を相互に情報伝達する通信装置と、前記通信装置を経由して他の飛しょう体から受信した前記他の飛しょう体が捕捉した目標の位置及び速度等の目標情報に基づいて、捜索範囲に前記他の飛しょう体が捕捉した目標が含まれないように前記シーカの捜索範囲を設定する信号処理部とを備えるようにした。
(もっと読む)
小便器洗浄システム
【課題】複数のドップラーセンサから発信される電波同士が干渉して、自動洗浄機能が誤作動することを防止した小便器洗浄システムを提供する。
【解決手段】ドップラーセンサにより人体や尿を検知して使用後の便器を自動洗浄する自動洗浄機能を備えた複数の小便器を併設してなる小便器洗浄システムにおいて、複数の小便器のうちの一つに設けられた制御手段は、各小便器に設けた各ドップラーセンサを、その動作期間が互いに重複しないように間欠動作させるべく、他の小便器の制御手段へ、通信手段を介してドップラーセンサの動作タイミングを指定する動作タイミング情報を送信する主制御機能を実行し、この動作タイミング情報を受信した各制御手段は、動作タイミング情報に基づいて、各ドップラーセンサをそれぞれ間欠動作させる従制御機能を実行することにした。
(もっと読む)
レーダ装置の光軸調整方法
【課題】簡素な構成で且つ比較的に容易な方法に光軸調整を行うレーダ装置の光軸調整方法を提供する。
【解決手段】車体11に装着されたレーダ装置10は、車体11の正面方向に沿う基準軸101を有する。レーダ装置10に備えられたアンテナ装置20は光軸201を有する。アンテナ装置20は光軸201に直交し、車体11の正面に略平行な走査軸301に沿ってビーム走査しながら物体検知を行う。また、反射物体1は、基準軸101に直交し、走査軸301に略平行な移動軸100に沿って移動する。そして、光軸201を基準にして、検知結果に基づいて反射物体距離が極小となる方位を算出し、当該算出方位が基準軸101方向(方位0°)と一致するように補正を行う。
(もっと読む)
パルスレーダ装置及び測距方法
【課題】 ターゲットからの反射信号である一次エコーだけを出力する帯域合成処理を用いたパルスレーダ装置を得る。
【解決手段】 送信信号に2PRI周期で0度/180度の位相変調を施して送信する。ターゲットからの反射信号を送信信号と同一符号で復調することで、一次エコーは送信の位相変調が消えるのに対し、二次エコーはPRI毎に0度/180度の位相変調が加えられる。受信信号を合成帯域処理することで全セル数の半分に相当する距離だけ移動することを利用して、二次エコーの識別を行う。一次エコーと二次エコーのドップラ周波数の差分によって一次エコーが同様に移動してしまうことがあるため、処理フレーム毎に変調を施すフレームと変調を施さないフレームを交互に送信することで、ドップラ周波数によらず2フレームに1回は必ず一次エコーと二次エコーの分離を可能とした。
(もっと読む)
小便器洗浄装置及び小便器洗浄システム
【課題】マイクロ波ドップラセンサの動作をランダム周期で間欠的に行う場合においても、蛍光灯などからのノイズによる誤動作を抑制することができる小便器洗浄装置を提供すること。
【解決手段】ボール部に向けて電波を送信し、その反射波を受信してドップラ信号を生成するマイクロ波ドップラセンサを有し、ドップラ信号に基づいてボール部内に洗浄水を供給する小便器洗浄装置において、ランダムな不等間隔サンプリング周期でマイクロ波ドップラセンサを間欠動作させるセンサ制御手段と、サンプリング周期で出力されるドップラ信号を順次A/D変換してドップラ信号データを生成するA/D変換手段と、ドップラ信号データを所定の等間隔サンプリング周期のデータへ補間する周期補間手段と、補間した前記等間隔サンプリング周期のデータに含まれるノイズを除去するデジタルフィルタとを備えた。
(もっと読む)
空港用気象レーダ装置とその運用方法
【課題】 航空機の安全を考慮した最適なシーケンスで観測高度を切り替える運用を実現する。
【解決手段】 通信部1において、空港監視レーダから航空機位置情報を取得し、取得した位置情報から着陸機の情報のみを抽出して、着陸時間帯予測部12にて、その航空機位置情報から着陸行動時間帯を予測する。レーダ制御部13では、予測した着陸行動時間帯から着陸態勢に入る直前に低仰角走査モードとなるようにアンテナ走査の最適シーケンスを決定し、この最適シーケンスで気象ドップラーレーダ部14を制御する。観測結果判定部15では、レーダ部14の観測情報を取得して異常気象を判定する。この判定において、ダウンバーストのような危険な異常気象を判別した場合には、着陸態勢に入る航空機に対して警告を発する。
(もっと読む)
超広帯域モニタリング・システムおよびアンテナ
モニタリング・ステーションと前記モニタリング・ステーションと通信する少なくとも一つのセンサーとを有し、一または複数の生体被験体の生命徴候をモニタリングする装置。前記センサーは、アンテナ・システムと、前記アンテナ・システムに結合された超広帯域レーダー・システムと、信号プロセッサと、通信システムとを有する。前記信号プロセッサは、前記超広帯域レーダー・システムからの信号を受信するよう接続され、前記信号から、前記アンテナ・システムに対応する検知体積中の人または動物の一つまたは複数の生命徴候についての情報を抽出するよう構成されている。前記通信システムは、前記情報を前記モニタリング・ステーションに送信するよう構成されている。  (もっと読む)
(もっと読む)
481 - 500 / 647
[ Back to top ]