
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
621 - 640 / 647
人体検知装置及び制御装置
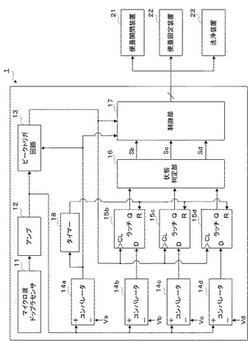
【課題】一つのセンサで人体の位置及び状態を検知することができる人体検知装置を提供する。
【解決手段】
マイクロ波センサ11から出力される人体の位置で強度の異なる出力信号を、アンプ12で増幅させる。出力信号のピークを検出しピークトリガ信号を出力するピークトリガ回路13と、コンパレータ14と、ピークトリガ信号に応じてコンパレータ14から出力された信号を出力するラッチ15と、状態判定部16とで、アンプ12で増幅された出力信号を処理し、得られた情報に基づき、制御部17は、便蓋開閉装置21等に所定の制御信号を送信する。
(もっと読む)
レーダ装置

【課題】周波数選定範囲が狭い場合であっても、目標検出性能および追尾能力を向上できるレーダ装置を提供する。
【解決手段】送受信したPRI間の信号をフーリエ変換して得られたドプラ周波数軸上において目標の検出処理および追尾処理を含む処理を行うレーダ装置において、PRIの基準時間をオフセットさせることによって、位相パターンのドプラ周波数軸に対する傾きが異なる複数の複素ウェイトを算出するウェイト演算部45と、算出された複数の複素ウェイトが順次設定されることにより形成されたフーリエ変換によるフィルタバンクによってフィルタデータを得るフーリエ変換処理部42と、得られた複数のフィルタデータから、フィルタバンクを構成するフィルタ毎に、複数の複素ウェイト間の最大値を検出する最大値選定処理部43と、最大値選定処理部における検出結果に基づいて目標を検出する目標検出処理部44とを備える。
(もっと読む)
移動速度測定方法及び移動速度測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,或いは移動局間の相対的な移動速度を直接測定することを可能とする。
【解決手段】無線局1の送信手段103が周波数f1 の第1の波と周波数f2 の第2の波を無線局2に送信し,無線局2の周波数シフト手段202が,受信したそれぞれの波の周波数をシフトし,第1の波から周波数f3 の第3の波を,第2の波から周波数f4 の第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信し,無線局1の周波数シフト手段105が,第1の波〜第4の波の,相異なる2組の2つの波を用い,それぞれ周波数をシフトして,周波数差が第1の無線局と第2の無線局間の相対移動速度に起因するドップラー効果で決められる第5の波と第6の波を生成し,測定手段106が,第5の波と第6の波の周波数差に基づいて,無線局1と無線局2間の相対移動速度を測定する。
(もっと読む)
ミリ波レーダ装置
【課題】 故障を的確に判定できるミリ波レーダ装置を提供する。
【解決手段】 上り・下り変調時ではない無変調状態のとき、例えば上り・下り変調の前をサンプリング範囲とし、このサンプリング範囲のときにビート信号を周波数解析する。そして、この周波数解析の結果から、自車速度に対応するFFT出力の信号レベルを想定される規定値と比較することで、高周波部が故障しているか否かを判定する。これにより、確実に高周波部の故障を検出することが可能となる。
(もっと読む)
レーダ装置、レーダ装置の制御方法
【課題】 一台で低コストにて、遠距離から近距離までの広い範囲のターゲットの検知が可能なレーダ装置を提供する。
【解決手段】 制御演算部11から入力されるFM用波形信号11bにて周波数変調を行って送信高周波信号13aを出力する送信高周波FM変調発信器13と、送信高周波信号13aを矩形波信号11aで制御される短パルス発生回路12から出力される制御パルス12aにてON/OFFすることで振幅変調する送信高周波ASKスイッチ回路14を含む送信部と、受信高周波信号の入力のON/OFFを矩形波信号11aに同期し、遅延時間が順次スライドする様に制御されたゲーティングパルス19aにて制御する受信高周波ゲート回路17を含む受信部を備え、FM用波形信号11bで周波数変調した送信高周波信号13aを用いるFM−CWレーダモードと、制御パルス12aで振幅変調した送信高周波を用いるパルスレーダモードとを切り換えて動作させる。
(もっと読む)
パルス変調回路
【課題】スイッチ動作時のON/OFF動作を改善するとともに、パルス変調回路全体としての出力電力のON/OFF比を改善することができる。
【解決手段】LO信号とDCパルス信号とを入力し、LO信号の2倍波とDCパルス信号とを混合してRFパルス信号を出力するハーモニックミクサ1を用いたパルス変調回路であって、ハーモニックミクサ1の前段にSPSTスイッチ2を直列接続し、SPSTスイッチ2をDCパルス信号によりハーモニックミクサ1と同時にスイッチング動作させる。これにより、SPSTスイッチ2のON/OFF比に、ハーモニックミクサ1自体のON/OFF比を加算できるので、スイッチ動作時のON/OFF動作を改善するとともに、パルス変調回路全体としての出力電力のON/OFF比を改善することができる。
(もっと読む)
踏切事故防止システム
【課題】踏切の通過者に対して踏切内での危険を確実に注意喚起し、踏切事故を未然に防止することができる踏切事故防止システムを提供する。
【解決手段】列車接近警告手段1により踏切Fの通過者C1に対して危険を喚起することができるが、列車検知手段1が列車Tの移動方向αを検知可能なレーダーとなされていることで、踏切Fと逆の方向に進行する列車の検知や、降雨等の影響を排除し、踏切Fの通過者C1に対して踏切F内での危険をより確実に注意喚起して踏切事故を未然に防止することができる。
(もっと読む)
ドップラレーダ装置の試験装置
【課題】外乱による干渉を低減し、かつ回路規模を小さくすると同時に精度の良いドップラシフトした周波数の信号を生成する低コストのドップラレーダ装置の試験装置を提供する。
【解決手段】送受信兼用のアンテナ9と、このアンテナ9を通じて基準周波数f0のマイクロ波を信号4として入力するとともに、アンテナ9に対してドップラシフトした信号5(f0+fd)を出力するLOポート18と、ドップラ周波数fdの信号6を入力するIFポート19と、ドップラ周波数fdの信号6により基準周波数f0のマイクロ波の信号4を周波数変換して、ドップラシフトした信号5(f0+fd)をLOポート18に出力する混合回路20とを有する周波数変換器13とを備える。
(もっと読む)
半径方向隙間の隙間寸法の検出方法
流体機械における回転部品と静止部品との間の半径方向隙間(18)の隙間寸法を検出する方法において、回転部品の表面に配置された送信装置(22)から放射された原始信号が、静止部品上に配置された受信装置(24)により変化して受信され、評価装置(48)に伝えられ、この評価装置(48)が受信信号から、回転送信装置(22)の軌道曲線のパラメータの検出によって(軌道検出)、半径方向隙間(18)の隙間寸法を検出し表示する。 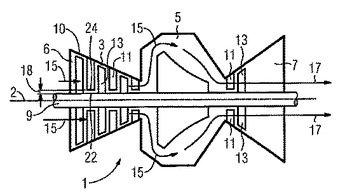 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】 車両周辺の監視を廉価に行うと共に、車両周辺監視の要処理時間を短くすることができること。
【解決手段】 車両1の異なる箇所に搭載した複数台の受信器A0〜D0と、その受信器A0〜D0が受信する電磁波を出力する送信器Eとを配設し、車両1付近に検出対象が存在しない状態で、送信器Eが出力した電磁波を車両1に搭載した受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶させ、送信器Eが出力した電磁波を車両1に搭載した複数台の受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶しているパターンと比較して、車両1の周辺状態を検出する。
(もっと読む)
レーダ装置
【課題】短時間で目標上の電波反射点の空間位置を算出し、目標の3次元形状を算出できるレーダ装置を得ることを目的とするものである。
【解決手段】目標による反射電波を互いに異なる位置にある2つの受信手段からなる一組の受信手段で受信し、目標上の電波反射点に対応するレンジ及びドップラー周波数からなる電波反射点情報を算出する。算出された電波反射点情報をそれぞれに対応する目標上の電波反射点が一致する一組の電波反射点情報として対応付けを行い、一組の電波反射点情報並びに目標と一組の受信手段との相対位置及び相対運動から目標上の電波反射点の空間位置を算出するようにしたものである。
(もっと読む)
短いパルス/ステップ周波数のレーダシステム
短いパルス、ステップ周波数、センターライン処理を組合わせた特有のハードウェアアーキテクチャである。本発明のアーキテクチャは短いパルスを送信する送信機と、そのパルスを受信してそれに応答して出力信号を提供する受信機とを有するレーダシステムを構成しており、各パルスは周波数がステップされている。例示的な実施形態では、送信機は周波数ソースと、そのソースに結合されたRFスイッチと、RFスイッチを制御する制御装置とを含んでいる。受信機はセンターラインラフィングフィルタで構成されている信号プロセッサを含んでいる。その信号プロセッサはそれぞれ距離ゲートとデジタルフィルタを有する多数のチャンネルを有している。デジタルフィルタは距離ドップラマトリックスを出力するように構成された高速フーリエ変換を含んでいる。 (もっと読む)
地形援助型航法システムの精度を高めるための方法およびシステム
航法プロセッサ(208)と、航法プロセッサに位置解を提供するように構成される慣性航法ユニット(206)と、デジタル標高地図(212)とを含む、航法システム(200)が説明される。説明される航法システムは、デジタル標高地図から地図データを受け取り、レーダの戻ってきたデータに基づいた位置解を航法プロセッサへ提供するように構成される、地形相関プロセッサ(210)を有する、レーダ高度計(50)も含む。航法システム内の地図品質プロセッサ(202)は、デジタル標高地図から地図データを受け取り、地図品質ファクタを航法プロセッサへ提供するように構成され、航法プロセッサは、地図品質ファクタに従って、地形相関プロセッサからの位置解に重み付けを行い(256)、その地形相関プロセッサの重み付けされた位置解と、慣性航法ユニットからの位置解とから、位置解を決定する。  (もっと読む)
(もっと読む)
非接触リーダライタ
本発明の目的は、異なる周波数の搬送波を用いた複数の送信信号を送信する送信部と、前記送信部により送信した複数の送信信号に対する返信である複数の返信信号を受信する受信部と、前記返信信号に基づく返信信号の位相データを算出する位相算出部と、前記位相算出部からの位相データに基づいて前記返信信号を返信した物体との距離を算出する距離算出部および/または前記受信信号から得られたベースバンド信号に基づいて、前記ベースバンド信号の周波数成分を算出し、前記周波数成分に基づいて前記返信信号を返信した物体の速度を算出する速度算出部と、前記送信部から送信する送信信号の送信方向を制御する制御部とを備えた非接触リーダライタを提供することである。 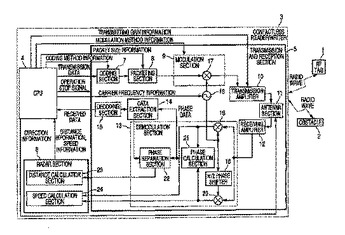 (もっと読む)
(もっと読む)
人員携行型対迫レーダシステム
本発明は、敵軍の飛行迫撃砲弾を検出して追尾し、その原点(出射点)を算出して迫撃砲および砲兵への対策を講じる人員携行型対迫レーダ(MCMR)システムである。更に、MCMRは、飛行機、ヘリコプタおよび地上車両を検出して追尾することにより防衛監視を行える。MCMRは運搬のために分解可能であり、現地で迅速に組み立て、敵軍の迫撃砲による攻撃に対して360度の探索可能領域を提供する人員携行型レーダシステムである。MCMRは、レーダパルスを放射し反射された目標エコーを受信するアンテナと、アンテナから放射すべきレーダパルスを発生させる発信機と、目標エコーに関する測定(範囲、方位および仰角)を行い、多重エコーを関連づけて目標軌道を発生させ、迫撃砲弾として軌道を分類し、迫撃砲兵器の推定位置を計算する受信機プロセッサと、レーダを運転し処理済みのレーダデータを表示および解釈することができる制御および表示コンピュータとを備える。 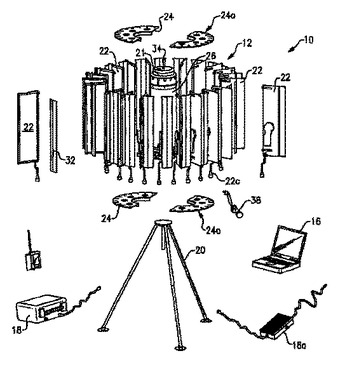 (もっと読む)
(もっと読む)
車載レーダ装置およびその信号処理方法
複数のアンテナを切り替えるものにおいては、同時に検知できる範囲は1つであるため、遠距離向けのアンテナの使用時は、近距離の検知範囲が細くなり、逆に近距離向けのアンテナの使用時は、最大検知距離が低下する。また、レーダと画像センサを組み合わせるものでは、画像センサは、悪天候や光線条件(逆光,順光等)によってレーダ単体の場合と同様の検知性能になる場合がある。前方に電波を照射して反射波を受信することにより、少なくともターゲットとの相対速度又はターゲットの位置を検出する第1レーダと、該第1レーダとは検知範囲が異なる第2レーダとを備え、双方とも常時ターゲットの検知を行う。また、上記のようなレーダ装置において、ターゲットが前記第1レーダの検知範囲から外に出たときは、その直前の前記ターゲットの検知情報を前記第1レーダから前記第2レーダに引き渡す。 (もっと読む)
レーダ
バックグラウンドノイズの強度によって第1のしきい値(TH1)を定め、ピーク(P1),(P2),(P3)の各裾野部分にピーク位置から所定の近傍周波数領域にしきい値(TH21),(TH22),(TH23)を設定し、各FFTビンでこれらのしきい値のうち値の高い方を最終的なしきい値として採用し、そのしきい値を超えるピークをターゲットピークと見なして検出する。これにより、ビート信号の周波数スペクトルに含まれている物標からの反射波に起因して生じるターゲットピークを確実に検出し、物標の探知精度を高める。  (もっと読む)
(もっと読む)
自動車安全装置用の物体認識装置および方法
本発明は、少なくとも1つの電磁波(12)を発生するために構成されている信号源(11)および障害物(16)から反射される少なくとも1つの電磁波(18)用の受信機(14)を備えた自動車搭乗者保護システム用物体認識装置に関する。本発明によれば、評価装置(20)が設けられて、障害物(16)から反射されかつ受信機(14)によって受信される少なくとも1つの電磁波(18)の偏波を評価し、かつ少なくとも1つの評価信号(22)を発生するように構成されている。それにより、例えば表面構造のように障害物に関する付加的な情報を得て、自動車搭乗者保護システムのために使用することが可能である。 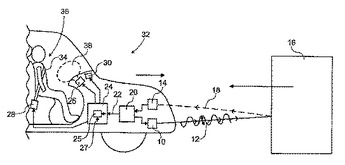 (もっと読む)
(もっと読む)
合成開口レーダシステム及び局所的な測位のための方法
測位システムは、固定された位置にあるパッシブな等方性反射標識と、デバイスとを含む。前記デバイスは、ある期間に渡って、円偏波を有する電磁パルスを送信し、帰還信号を受信する。前記帰還信号は、前記反射標識から反射されたパルスを含む。前記帰還信号から前記反射パルスを隔離するため、及び前記デバイスから前記反射標識への距離を決定するために、前記帰還信号を処理する。前記反射標識は、第1のパッシブ反射体と、第2のパッシブ反射体と、前記第1のパッシブ反射体を基準にした角度で前記第2のパッシブ反射体を静止して測位するように構成される静的構造とを含む。オプションとして、前記デバイスは、前記帰還信号を受信中に、ある特定の方向に移動し、前記帰還信号の前記反射パルス部分におけるドップラーシフトを検出し、前記特定の方向と、前記デバイスと前記標識間の直線との間の角度を決定する。
 (もっと読む)
(もっと読む)
静止状態で高度計を自己試験するためにドップラー信号をシミュレートするための方法および装置
静止状態の下でドップラー信号をシミュレートするための方法が記述される。この方法は、反射信号周波数の整数倍数と反射信号周期の分数との和でレーダー反射信号をサンプリングするステップ(154)と、サンプルからベースバンド信号(152)を生成するステップとを含む。  (もっと読む)
(もっと読む)
621 - 640 / 647
[ Back to top ]