
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
601 - 620 / 647
ドプラ算出装置およびレーダ装置

【課題】 目標物体に対する相対速度および接近/離反をIQ検波方式により求めるドプラ算出装置であって、これを小規模にかつ高速処理可能に実現する。
【解決手段】 ドプラ算出手段11により、目標物体からの受信信号をIQ検波して得たI−チャンネルおよびQ−チャンネル信号により定まるベクトル回転角の変化量に基づいてドプラを算出する。この場合、I−チャンネルおよびQ−チャンネル信号の各正負極性(+,−)を表す符号対の周期的な変化を検出する。そして、その変化の周期性に基づいて、相対速度(V)および接近/離反(A/R)を算出するように構成する。
(もっと読む)
物体検知センサ

【課題】
対象物の種類の違いによる検知距離のバラツキを小さくすること。
【解決手段】
所定周波数の出力信号を生成する発振器11と、発振器11にて生成された出力信号を対象物9に向けて送信する送信アンテナ13と、送信アンテナ13から送信された出力信号が対象物9にて反射した反射信号を受信する受信アンテナ14とを備え、出力信号と反射信号とを混合することでドップラー信号を生成し、ドップラー信号に基づいて対象物9を検知するドップラーセンサ10において、ドップラー信号に基づいて出力信号の対象物9での反射度合を検知するピーク判定部21と、ピーク判定部21により検知された反射度合に応じて対象物9の有無を検知する感度を調節する感度調節手段30とを備える構成としたこと。
(もっと読む)
車両の走行制御装置
【課題】 自車の前方に存在する複数の物体が不適切に統合されるのを防止して車両制御を的確に行えるようにする。
【解決手段】 レーダー装置で自車Vaの前方の物体T1…を検知し、所定範囲内に存在する複数の物体T1〜T5を統合して大型車両Vbに対応する目標物体Taとする。目標物体Taの代表位置から3m以上前方に離れており、かつ代表位置の左端点から0.8m以上左方(推定軌跡に近づく方向)に離れており、かつ自車Vaから前方50m以内にあり、かつ自車Vaの推定軌跡内に含まれる領域に物体T5が存在すれば、その物体T5を小型車両Vcに対応する目標物体Tbとして元の目標物体Taから分離する。そして目標物体Tbに基づいて自車Vaの走行状態を制御することにより、自車Vaの推定軌跡内に存在する小型車両Vcに対して適切に制御できる。
(もっと読む)
速度センサおよびそれを用いた対地車速センサ
【課題】検知誤差を低減した高精度な速度センサを実現すること。
【解決手段】センサ回路部3により電磁波を生成し送信アンテナから放射する。さらに、受信アンテナにより地面からの反射波を受信し、混合器により局部信号と混合することで低周波信号を生成する。センサ回路部3から放射された電磁波は、誘電体レンズ2によりビームを成型した後、地面に照射するが、このとき、ビーム形状4はセンサ近傍のビーム幅に対して、地面近傍のビーム幅が小さくなる形状にする。
(もっと読む)
種々異なる距離範囲内の物標を監視するためのレーダシステム
種々異なる距離範囲内の目標を監視するためのレーダシステムで、種々異なる距離乃至距離範囲内で、相互に区別すべき2つの対象間の伝搬時間に相応する長さよりも大きな長さのレーダパルスが送出される。受信側で、レーダ送信パルス成形器(3)に供給される高周波パルスとレーダ受信信号が混合器(6)に供給される。混合器(6)の出力信号は、少なくとも1つの走査器(7,8)を介して信号評価部(9)に供給され、該走査器(7,8)の、レーダ送信パルスの上昇側縁に対する遅延調整により、監視すべき距離範囲の到達距離の境界が設定される。 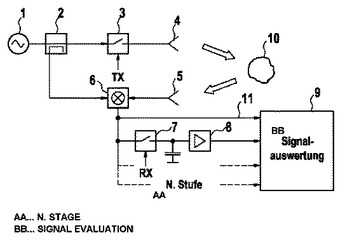 (もっと読む)
(もっと読む)
速度が曖昧な物標の非コヒーレント積分のための技法
パルスドップラーレーダ信号を処理して物標を検出するための方法は、周波数ダイバーシティを有する信号を含む所定の周波数技術に従って、レーダシステムからレーダ信号を送信し、1つの周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、可変周波数スケールを有するフーリエ変換を用いて物標エコー信号を変換することを含む。  (もっと読む)
(もっと読む)
定在波レーダ装置及び定在波レーダの相対速度距離測定方法
【課題】相対速度を測定する時間領域と距離を測定する時間領域とを時間的に分割して、より正確に測定対象までの距離と相対速度を測定することのできる定在波レーダ装置を提供する。
【解決手段】本発明の定在波レーダ装置1では、相対速度を測定する時間領域では所定周波数の送信信号が発振器2によって発振され、距離を測定する時間領域では周波数を段階的に変化させた送信信号が発振される。送信器3はこの送信信号を送出し、定在波を受信器4が検出する。そして、信号処理器5が定在波の振幅値の時間変動に基づいて相対速度を算出し、周波数変化タイミングから所定時間後の定在波振幅値をサンプリングしてサンプリング波形に基づいて距離を算出し、相対速度の値を使用して算出された距離の誤差を補正する。
(もっと読む)
風計測方法及びその装置
【課題】 低サンプリングレートのA/D変換器を用いて、広い測風速範囲に対応した風計測装置を実現する。
【解決手段】 照射したビームの大気による反射波のドップラー周波数を用いて遠隔地点の風速を計測する場合に、反射波の受信信号をディジタル変換するサンプリングレートでサンプリング可能な周波数を、ビーム照射方向と風向とのなす角によって変動する反射波のドップラー周波数が超過しない範囲の方角(例えば方角101、103、105など)から複数のビーム照射方向を選択し、選択された複数のビーム照射方向のドップラー周波数を組み合わせて、風速を計測する。
(もっと読む)
レーダ装置
【課題】 走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるようにする。
【解決手段】 不等間隔に配置されている複数の素子アンテナから構成されている受信アンテナ3を用いて、目標に反射されたパルス信号を繰り返し受信する受信器の他、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9を設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて受信ビームを形成する。
(もっと読む)
ウィンドプロファイラ・システム
【課題】 観測データのうち正常なデータを残し信頼性が低いデータを削除する。
【解決手段】 信号処理装置2は受信した観測データからスペクトルデータを算出しスペクトルデータをモーメントデータに変換する。データ処理装置3はモーメントデータについて品質管理処理を行い、その結果のデータとスペクトルデータとから表示データを作成して観測データの再生を行う。品質管理処理部32は、5方向毎に視線風速の大きさについて高度毎,時間毎に周囲の視線風速の大きさと比較して所定の閾値外のものを排除する時空間チェックと、水平風速の東西成分に対する南北成分の比率について高度毎および時間毎に周囲の正接と比較して所定の閾値外のものを排除する時空間チェックを行う。
(もっと読む)
車上盗難警戒器
【課題】車外と車内とを確実に識別して車外近傍の人の移動や車内侵入に対する盗難警戒を行うことができる車上盗難警戒器を提供することにある。
【解決手段】マイクロ波センサは、マイクロ波アンテナ11によって車内及び車外周辺を検知範囲としてマイクロ波信号を送信するとともに反射されてくるマイクロ波信号を受信して該受信したマイクロ波信号の周波数偏移により移動体を検知する。一方超音波センサは超音波信号を送受波器21によって車内に送波するとともに反射されてくる超音波信号を受波して、受波した超音波信号の周波数偏移から移動体を検知する。両センサにおいて周波数偏移から移動体を検知する回路部は共用回路部3によって構成され、信号処理回路4はこの共用回路部3から出力されるマイクロ波センサの検知信号、超音波センサの検知信号を監視し、その検知信号に基づいて報知器5により報知を行わせる。
(もっと読む)
移動体検知装置
【課題】 2周波CW方式レーダを用いた移動体検知装置において、2つのドップラ信号間の位相差をFFT等の複雑な演算処理で求めると処理負荷が大きい。
【解決手段】 ミキサ32から時分割で交互に出力されるドップラ信号D1,D2を切替器34で分離し、それぞれをLPF36,38で平滑化する。差分器44は、平滑化されたD1,D2の差信号を生成する。差信号の振幅BはD1,D2相互の位相差Δφ及び元のドップラ信号の振幅Aに応じて増減する。移動体までの距離Rは位相差Δφと比例関係にあり、Δφは信号強度比κ(≡B/A)に比例する式で近似される。そこで、除算器50でκを求め、これを距離Rを表す指標として用い、移動体検知を行う。
(もっと読む)
車両用後側方警報装置
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
車両用のレーダーセンサ
周波数変調されたレーダー信号を送受信する少なくとも1つの送受信器(14、16)と、位置測定された対象物との間隔(di)および相対速度(vi)を計算する評価器(24、48)とを備える、車両用のレーダーセンサにおいて、相対速度(vi’)を独立して測定する統合されたドップラーレーダーシステム(26、42、44)を特徴とする。 (もっと読む)
生物の身体または身体内の位置および/または運動を、レーザ支援してセンシングする方法
本発明は、生物の身体または身体内部の身体部分の位置および/または運動に関する情報をセンシングするためのシステムに関するものであり、とりわけ自動車で使用される。この方法は、本発明によりレーダ領域の周波数を有する電磁信号(15)を生物の所定の身体領域に送信(18)するステップ、
身体領域から反射された電磁信号(22)を受信(20)するステップ、
受信した受信信号(22)を、送信信号(15)に対する伝搬時間差および/または周波数差に関して評価(30)するステップを有する。
本発明の方法により、呼吸および心拍、並びに自動車の運転者の身体の位置が走行中に監視される。 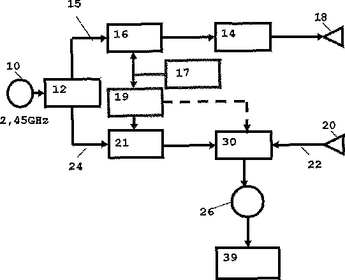 (もっと読む)
(もっと読む)
レーダ装置
【課題】 クラッタ環境下で目標とクラッタのドプラ速度が近接している場合でも、処理規模の小さな方法でクラッタを抑圧し、かつ目標を検出する。
【解決手段】 MTI(41)の周波数フィルタの形状を決めるパルスヒット数を決める際に、クラッタが強い場合に、MTIのヒット数を多くしてクラッタを抑圧するという観点からヒット数を決め、クラッタに対しては抑圧度を大きくし、かつクラッタ近傍の目標については抑圧しないように決めた係数(44)によりMTI(41)を実施し、その信号に対してDFT(42)を実施する。このように、MTI(41)の周波数フィルタの形状を決めるヒット数を多くして、クラッタに対するヌルの形状をシャープにし、この共通のMTI出力を用いてドプラフィルタを形成することにより、フィルタバンク毎の係数制御は不要になり、処理規模の小さな方法でクラッタを抑圧し、かつドプラ周波数の近接した目標を検出することができる。
(もっと読む)
センシング手段及び接近警告システム
【課題】降雨や降雪による誤検知が考え得る場所に設置した場合に、誤検知の発生頻度を低減することができるセンシング手段及び接近警告システムを提供する。
【解決手段】電波発信部1及び電波受信部2が斜め下方に向けられていることで、重力によって下方に向けて進行する雨滴Aや雪粒Yは電波発信部1及び電波受信部2から全て遠ざかる方向に進行するようになり、電波受信部2から遠ざかる方向に進行する移動体から生じる反射波R2を検知対象から排除することで、かかる雨滴Aや雪粒Yにより生じる反射波R2に起因する誤検知の発生頻度を低減することができる。また電波受信部2から遠ざかる方向に進行する移動体を検知対象から排除するのみであるから、判別手段3を簡便なものとできる。
【参照図】 図2
(もっと読む)
レーダ装置
【課題】小型の恒温装置または簡単な冷却装置を備えた送信機を用いてクラッタ抑圧度を改善できるレーダ装置を提供する。
【解決手段】送信機1と、発生された送信信号を送信波として指定方向の空間に送信し且つ該送信波の反射波を受信するアンテナ3と、アンテナで受信された反射波をデジタルビデオ信号に変換する受信機4と、送信機で発生される送信信号の送信パルス幅と送信間隔とに基づいて該送信機の温度を算出する温度算出装置9と、算出された送信機の温度に基づき受信信号の振幅および位相の補正値を算出する補正値算出装置10と、算出された補正値に基づいて、受信機からのデジタルビデオ信号に含まれるパルス内の振幅および位相を補正する振幅・位相補正装置11と、振幅・位相補正装置からの信号に含まれるクラッタを抑圧するMTI装置5を備える。
(もっと読む)
対象物検出システムの信号またはデータを評価する方法および装置
殊に自動車用の対象物検出システムを提案する。ここではレーダセンサによって、対象物から反射されたレーダ信号が、対象物の距離(d)および/または相対速度または接近速度(Cv)を求めるために処理される。最初の評価機会が距離信号(d)または接近速度信号(Cv)として生じるまでレーダセンサの少なくとも1つのチャネル(I,Q)のデジタル信号を処理し、距離信号(d)または接近速度信号(Cv)としての評価に対するモード切り換え(4)を行い、当該切り換えによって、どのデータが求められるのかが定められ、レーダセンサと後続接続された制御装置(7)との間のインターフェース(6)に供給される。  (もっと読む)
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 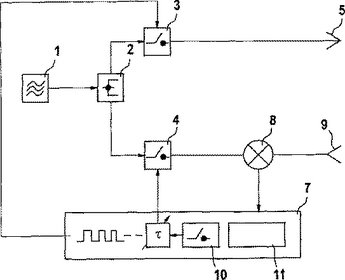 (もっと読む)
(もっと読む)
601 - 620 / 647
[ Back to top ]