
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
581 - 600 / 647
レーダ装置
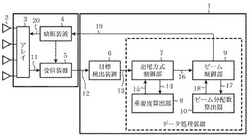
【課題】 目標の重要度に応じたビーム分配により探知と追尾を同時に行うことで両者の性能を向上させたレーダ装置を提供する。
【解決手段】 探知された目標の航跡が追尾すべきTBMなどの移動体の航跡に合致する度合いに応じて、追尾に割り当てるビーム数を決定するための重要度を求める重要度算出器8と、重要度に応じて探知と追尾にそれぞれ割り当てるビーム数を算出するビーム分配数算出器10と、ビーム分配数算出器10が算出した分配数に従って探知及び追尾のビーム割り当てを制御するビーム制御部9とを備える。
(もっと読む)
レーダ装置

【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
スポーツボールの回転パラメータの決定
ゴルフボールの回転軸や回転速度のような、スポーツボールの回転パラメータを決定する方法である。回転軸は飛んでいるボールの軌跡からのみで決定され、回転速度はレーダーによって得られた信号の振動数解析から決定され、このような信号は振動数が等間隔に位置するスペクトルトレースを含んでおり、このような振動数の距離は回転速度に関連している。  (もっと読む)
(もっと読む)
自動車用レーダーシステム
レーダーセンサ(10)と、車両の周囲にある対象の距離(D)と相対速度(V)を測定する評価装置(12)と、測定された距離と相対速度を用いて差し迫った衝突を認識して、予測される衝突時点(Tc)と衝突速度(Vc)に関するデータをプリクラッシュシステム(20)へ供給する衝突認識装置(18)とを有する自動車用レーダーシステムは、レーダーセンサ(10)が、衝突認識装置(18)によって速度測定モード(CW)へ切り替え可能であって、速度測定モードにおいて相対速度(V)のより正確な測定が行われることを特徴とする。 (もっと読む)
レーダ装置とその信号処理方法
【課題】折り返し補正ミスを低減できるようにし、これによりターゲットの速度を高精度かつ高い信頼性で算出することの可能なレーダ装置とその信号処理方法を提供すること。
【解決手段】PRFを切り替え可能なレーダ装置にあって、PRFごとの位相回転量がターゲットのドップラー速度(PRF)に比例するということに基づいて、受信したパルスエコーの位相回転量を基準値であるPRFに基づく値に、複数の折り返し条件で補正する。これにより得られた補正位相角データに基づく速度ベクトルをベクトル合成し、その絶対値が最大となる状態を、速度折り返しの発生状態として採用するようにした。
(もっと読む)
移動予測表示装置およびレーダシステム
【課題】様々な形状の物標についても、観測者が物標の移動予測結果を把握することが容易である移動予測表示装置およびレーダシステムを提供する。
【解決手段】画像データ生成部16は、測位レーダ部12で取得された測位データに基づいて画像データを生成し、測位画像データ記憶部18に入力する。切り出し部20は、観測しようとする面、すなわち切り出し面のデータを測位画像データ記憶部18から取り出し、画像合成部24および表示判定部26に入力する。表示判定部26は、物標の像が移動する様子によって物標の移動予測の結果を表示することが可能であるか否かの判定を行う。一方、ドップラレーダ部14は、切り出し面内での物標の移動速度を算出し、画像合成部24に入力する。画像合成部24は、表示判定部の判定結果に従って物標の移動予測の結果を表示する画像データを生成し、画像表示部30に入力する。
(もっと読む)
レーダ装置とその信号処理方法
【課題】エコー反射強度のばらつきにを低減しターゲットの速度を高い精度で算出することの可能なレーダ装置とその信号処理方法を提供すること。
【解決手段】PRFを切り替え可能なレーダ装置にあって、PRFごとの位相回転量がターゲットのドップラー速度に比例するということに基づいて、受信したパルスエコーの位相回転量を基準値であるPRFに基づく値に補正するようにする。これによりPRFによらず速度算出に係る受信データを統一的に扱えるようにし、より多くの受信データを用いてターゲットのドップラー速度を算出するようにする。したがって、エコー反射強度のばらつきを平均化する効果を高められ、速度算出の精度を向上させることが可能になる。
(もっと読む)
自動吐水制御装置
【課題】 自動吐水制御装置を持つ洗面台で、検知対象物の進入角度、進入位置の如何に関らず、洗面台の上方空間に進入する検知対象物を確実に検知して吐水を行うようにする。
【解決手段】 マイクロ波センサ7はアンテナ51と、アンテナ51を励振して電波ビームを放射させると共に受信した反射電波の信号からドップラ信号を生成するドライバ回路53とを有する。ドライバ回路53はアンテナ51を操作して電波ビームの放射方向をシンクの上方空間領域からシンクの底部領域へ、又はこれとは逆に切替える機能を持つ。コントローラ部9はドライバ回路53からドップラ信号を入力し、手の進入や手洗いの継続などを判断し、この判断結果に応じて水栓機構に接続されるバルブ5の開/閉制御を行ったり、電波ビームの放射方向の切替え指示をドライバ回路53に与えたりする。
(もっと読む)
自動吐水制御装置
【課題】 如何なる方向から移動してくる物体であっても、その有無を正確に検知して吐水のオン/オフ制御が行え、物体の誤検知による誤作動を防止できるようにする。
【解決手段】 コントローラ部は、マイクロ波センサ5から出力されるドップラ信号に基づいて、手が所定空間領域に進入したか否か判断し、手が存在すると判断したら、電磁バルブ開の制御信号を出力することにより吐水口3cを通じて水を吐水させる。電波ビームの放射方向が放射方向11にスキャニングされている状態で、センサ5から対象物検知信号が出力されると、その対象物を洗浄のため吐水口3cの略直下の空間領域に向かって進入しようとする手であると判別し、吐水口3cが現在吐水中であれば吐水を継続すべく、未だ吐水を行っていなければ吐水を開始すべく、電磁バルブに制御信号を出力する。
(もっと読む)
2周波CWレーダ
【課題】2周波CWレーダと回転支持機構との結合態様を工夫して、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現する。
【解決手段】同一方向を向いた送信アンテナ34及び受信アンテナ35と、周波数f1,f2の異なる連続波をアンテナ34から空中へ出射する送信部31〜33と、アンテナ35で受信した反射波からドップラー低周波信号fd1,fd2 を検出する受信部36〜37と、その低周波信号から位相差Δφを検出して反射物までの距離Rを算出する信号処理部61と、アンテナ34,35を搭載して軸回転する回転支持機構63とを備え、その搭載がアンテナ34の出射中心線67と回転支持機構63の回転軸42とをねじれの位置の直線にする状態でなされる。
(もっと読む)
レーダ信号処理装置及びレーダ信号処理方法
【課題】風等によりアンテナ動揺が生じグランドクラッタや目標のみかけのドップラ周波数が変化しても、グランドクラッタを抑圧し目標を探知する。
【解決手段】レーダ装置の受信信号をA/D変換器1でディジタル受信信号に変換し、MDF処理器2でFFT処理してドップラフィルタバンク毎の信号にする。判定処理器3により、MDF処理器2の出力のうちグランドクラッタ中心周波数に対応するドップラフィルタ番号を判定する。ドップラフィルタ番号変更器4で、MDF処理器2の出力それぞれのフィルタ番号を、判定処理器3から出力されたグランドクラッタの中心周波数のドップラフィルタ番号を差し引いた番号に付け替える。これにより、ドップラフィルタ番号の補正を行い、低ドップラフィルタ信号除去器5で低ドップラ周波数のフィルタバンク出力を除去し、最大値選択処理器61及びTH判定処理器(2)62により目標情報を探知する。
(もっと読む)
ドップラ効果を用いた速度計測方法及びドップラ速度計
【課題】ドップラ速度計で、被計測物体に発射する送信波の周波数が低い場合であってもドップラ周波数を増大させることができ、高分解能で速度を検出可能とする。
【解決手段】被計測物体1に向かって発射された送信波tを被計測物体1と反射体3とで複数回反射させることで、前記送信波tに生じるドップラ周波数を増大させ、この増大したドップラ周波数を基に前記被計測物体1の速度を算出する。
(もっと読む)
小便器洗浄装置
【課題】 マイクロ波ドップラーセンサーを用いた小便器において、排水の影響による小便器の封水面の変動、対面設置の大便器ブースのドア開閉等の外乱の影響による人体誤検出を防止する小便器を提供する。
【解決手段】 小便器の前方に向けて送受信を行うマイクロ波ドップラーセンサーと、その受信出力を第1の周波数フィルターからの第1人体検出出力と、第2の周波数フィルターからの第2人体検出出力と、第1人体検出出力及び第2人体検出出力による接近検出判断値と、接近検出判断値と比較して判断する接近判断手段と、接近判断手段を有する制御部とを備えた小便器洗浄装置において、制御部は受信出力から第3の周波数フィルターからの尿流検出出力と、尿流の有無の判断となる尿流検出判断値と、尿流の有無を判断する尿流検出手段を有するとともに、尿流検出手段の出力に応じて接近検出判断値を更新する。
(もっと読む)
周辺監視装置
【課題】 ドップラーセンサ1を用いて、該ドップラーセンサ1の設置位置周辺に位置する移動物体の動きを監視する場合に、外乱周波数が存在する環境下にあっても、監視すべき移動物体(特に人)の動きを正確に把握できるようにして、該移動物体の車両Cの車室内への侵入等を正確に予測できるようにする。
【解決手段】 FFT解析部13にてFFT解析により周波数レベルが求められた全バンド幅のうち所定の周波数範囲の最大及び最小周波数を含むバンド幅を除く少なくとも1つが、第1の設定レベル以上の周波数レベルとなる特定バンド幅である場合において、該特定バンド幅に対して周波数の高い側及び低い側にそれぞれ隣接する2つのバンド幅の周波数レベルが共に、上記第1の設定レベルよりも低い第2の設定レベル以下であるときには、外乱周波数除去部14にて上記特定バンド幅の周波数レベルを低下させる。
(もっと読む)
周辺監視装置
【課題】 ドップラーセンサ1を用いて、該ドップラーセンサ1の設置位置周辺に位置する移動物体の動きを監視する場合に、その出力信号に携帯電話等によるノイズが加わった状態であっても、監視すべき移動物体(特に人)の動きを正確に把握できるようにする。
【解決手段】 全バンド幅の周波数レベルの総和を所定時間毎に演算するとともに、該演算された総和に基づいて基準レベル及び異常レベルを設定し、上記演算された総和が上記異常レベルを越えかつ該異常レベルを越えたときから上記第1設定時間経過しても該異常レベル以下とならないとき等には、正常であると判定し、上記総和が上記異常レベルを越えかつ該異常レベルを越えたときから第1設定時間経過しても該異常レベル以下とならないときには、上記基準レベルを、上記第1設定時間内に演算された総和に基づいて設定した新たな基準レベルに更新する。
(もっと読む)
乱気流を遠隔的に測定するシステム
乱気流を検知するシステム及び方法は、数台の移動プラットフォームと、移動プラットフォーム速度センサと、数台の電磁エネルギー送信器及び受信器とを含む。受信器は、送信器によって送信されたエネルギーを、乱気流を被る経路沿いに進んだ後に、受信する。受信器は、乱気流によって生じるエネルギーの変化を検知し、(送信器または受信器のいずれかが配置された)移動プラットフォームの速度の効果を変化から選別する。加えてシステムは、の3次元モデルを作成できる。別の実施形態において、本発明は移動プラットフォームを使って乱気流を検知する方法を提供する。方法は、乱気流を被る経路に沿って進んだ電磁エネルギーを受信することと、乱気流によって生じたエネルギーの変化を判定することとを含む。好ましくは受信器が配置される移動プラットフォームの速度の効果は変化から選別される。  (もっと読む)
(もっと読む)
コヒーレントレーダ妨害装置
【課題】レーダに対して送信する妨害波がコヒーレントになるように制御するコヒーレントレーダ妨害装置に関し、コヒーレントレーダに対して有効な妨害を可能とする。
【解決手段】順次受信される各レーダパルス(1),(2)の波形を記憶し、記憶した波形を各受信レーダパルス毎に繰返し連続的に再生する妨害装置において、各々の繰返し再生妨害波の(1)−1〜6,(2)−1〜6の、レーダパルス入力タイミングからの再生延時間Td11〜Td16,Td21〜Td26を、それぞれ各受信レーダパルス(1),(2),…に亙って一定になるように制御する時間管理機能を有する。即ち、Td11=Td21=…、Td12=Td22=…、・・・、Td16=Td26と成るように制御する。
(もっと読む)
誘導弾システム
【課題】 ホバリング中のヘリコプタに対しても効果的に対処できる、電波センサを用いた誘導弾システムを得る。
【解決手段】 電波センサとして、要撃管制装置1側に送受信部(1)11及び信号処理部(1)12を、また誘導弾側に送受信部(2)21及び信号処理部(2)22をそれぞれ備え、これら電波センサにより回転翼を有する対象目標を検出し、その目標情報を取得する。また、要撃管制装置1側での要撃計算の結果として対象目標との予想会合点とともに、所定のホーミング時間が確保された上方円弧状の飛翔経路情報、及びゲインを算出し、これらを誘導弾2側に指示する。さらに、誘導弾2におけるホーミング誘導計算の実行時には、操舵量に対するゲインとして、要撃管制装置1側で取得したゲインと誘導弾2側で取得したゲインとを相補的に適用し、対象目標への誘導接近中における良好な誘導精度を維持する。
(もっと読む)
車載用レーダ
【課題】広い角度範囲での対象物検知に対して高速の信号処理が可能な車載用レーダを提供すること。
【解決手段】車載用レーダは、電磁波を放射する送信アンテナ1と、対象物によって反射された上記電磁波を受信する2個の受信アンテナ2a,2bと、送信アンテナと2個の受信アンテナとが面上に配置されたアンテナ板3とを備える。更に、2個の受信アンテナが並ぶ方向を方位方向としたときに、方位方向にアンテナ板を回転することによって2個の受信アンテナにより形成される検知角を走査する駆動部4を備える。駆動部は、走査と走査の間に回転を停止する静止時間を設ける。車載用レーダは、更に、2個の受信アンテナから出力される受信信号と静止中のアンテナ板の回転角とから、静止時間において対象物の基準方向に対する方位角を検出する信号処理部13を備える。
(もっと読む)
不要波抑圧装置
【課題】 アンテナのサイドローブだけでなく、主ビーム方向やそれに近い方向から入射するクラッタなどの不要波を十分に抑圧することができる不要波抑圧装置を得ることを目的とする。
【解決手段】 ディジタルマルチビーム形成部5により形成された受信ビームのビーム信号を複数の帯域に分割するDFB6−nと、そのDFB6−nにより分割された複数のビーム信号に所定の荷重を乗算し、荷重乗算後のビーム信号を足し合わせて不要信号のレプリカを生成する加算器14等とを設け、そのDFB6−nにより分割された複数のビーム信号の中から主ビーム方向に対応している注目帯域のビーム信号から不要信号のレプリカを減算する。
(もっと読む)
581 - 600 / 647
[ Back to top ]