
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
221 - 240 / 647
車両速度計算装置及び車両速度計算方法及び車両速度計算プログラム
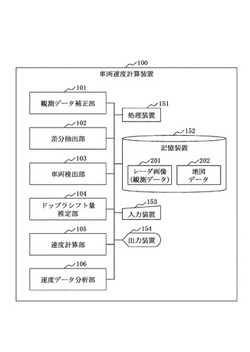
【課題】レーダの観測データから車両の速度を高精度で求める。
【解決手段】車両速度計算装置100において、車両検出部103は、合成開口レーダ(SAR)によって、道路が敷設された地域を観測し、その結果として得られたレーダ画像201から、道路の近傍に存在する車両を検出する。ドップラシフト量推定部104は、道路301の位置と車両検出部103が検出した車両のレーダ画像201における位置との間の距離に基づいてドップラシフト量を推定する。速度計算部105は、ドップラシフト量推定部104が推定したドップラシフト量を車両検出部103が検出した車両の速度へ換算する。
(もっと読む)
ドップラセンサ

【課題】製造コストの増大や大型化を抑えながらも、検出範囲の広さと鉛直下方向附近の立体角に対する感度とを共に確保することができるドップラセンサを提供する。
【解決手段】発振器11からの送信信号が、切替スイッチ13により、鉛直下方を含む第1検出範囲に送信波を送信する第1送信アンテナ12aと、鉛直下方を含み第1検出範囲よりも立体角が小さい第2検出範囲に送信波を送信する第2送信アンテナ12bとの一方に択一的に入力される。第1送信アンテナ12aにより比較的に広い第1検出範囲を確保しながらも、鉛直下方に関しては第1検出範囲よりも絞られた第2検出範囲に対応する第2送信アンテナ12bを用いることで感度を確保することができる。また、第1検出範囲と第2検出範囲とで発振器11と信号処理回路2とが共用とされることにより、製造コストの増大や大型化が抑えられる。
(もっと読む)
ドップラセンサ
【課題】 誤検出が抑えられるドップラセンサを提供する。
【解決手段】 送受信回路1が出力し送信信号の周波数と受信信号の周波数との差の周波数を有するドップラ信号を高速フーリエ変換するFFT部22と、FFT部22の出力において所定のノイズ判定時間以上にわたって振幅が所定のノイズ判定振幅以上であり続けている周波数であるノイズ周波数が存在する場合には、ノイズ周波数のうち最も低い周波数である除去対象周波数の成分を少なくとも減衰させるようにドップラ信号を整形した整形信号を生成して出力し、ノイズ周波数が存在しない場合には、ドップラ信号をそのまま整形信号として出力する信号整形部23と、信号整形部23が出力した整形信号に基いて検出範囲に移動物体が存在するか否かを判定する判定部24とを有する。
(もっと読む)
間隔を決定するためのマルチビームレーダセンサ及び方法
本発明は、2以上の送信/受信チャネルを備え、送信/受信チャネルの信号経路はそれぞれアンテナと混合器を含み、第1混合器は双方向の転送混合器として構成され、第2混合器は第1駆動状態から第2駆動状態へ切替可能であり、混合器は第1駆動状態で双方向の転送混合器として構成され、第2駆動状態で少なくともほぼ絶縁型の受信混合器として構成されるマルチビームレーダセンサ装置に関する。本発明は、目標物の間隔/速度を決定する方法であって、2以上の送信/受信チャネルを利用して、レーダ信号が目標物の方向に送信され、かつ、反射されたレーダエコーが受信され、送信/受信チャネルの信号経路はそれぞれアンテナと混合器を含み、混合器が第1駆動状態で双方向の転送混合器として、第2駆動状態でほぼ絶縁型の受信混合器として混合器を利用するために、第1駆動状態から第2駆動状態へ切り替えられる方法に関する。 (もっと読む)
画像レーダ装置及び信号処理装置
【課題】レーダの移動に伴いレーダビームの照射方向を変化させる複数ビーム観測方式を実現する画像レーダ装置及び信号処理装置を得る。
【解決手段】同一または異なるプラットフォームに送信アンテナ及び複数の受信アンテナを搭載する画像レーダ装置であって、前記送信アンテナ及び複数の受信アンテナは、レーダの移動に伴いレーダビームの指向方向を変化させながら観測する。また、送受信アンテナ間隔の2乗をレーダ波長と観測対象領域のレンジとの積の2倍で割ったものに円周率を乗じた位相を持つ複素関数が1とみなせるように、送受信アンテナ間隔、レーダ波長、観測対象領域までのレンジを設計する。
(もっと読む)
レーダ装置
【課題】受信部の構成をシンプルにして位相モノパルス方式により位相の測定を高精度に行えるレーダ装置を提供する。
【解決手段】レーダ装置100は、受信系として、2つの受信アンテナ121、122と、受信アンテナ121、122から2つの受信信号を入力して両者を加算した和信号と両者の差である差信号を出力するハイブリッド回路123と、ハイブリッド回路123から和信号及び差信号を入力するスイッチ124と、スイッチ124から入力した和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部125とを備えている。2つの受信アンテナ121、122からの受信信号を、スイッチ124で切り替えることで1系列の受信部125で処理させるように構成している。
(もっと読む)
車載用モノパルス式レーダ装置
【課題】受信波に含まれる不要信号を除去して対象物を正しく検知することが可能な車載用モノパルス式レーダ装置を提供する。
【解決手段】車載用モノパルス式レーダ装置100は、通常行う対象物の検知とは別に、所定の時間間隔で不要信号の計測を行っており、測定された不要信号計測値を記憶部103に記憶している。そして、通常の対象物の検知の際には、記憶部103から不要信号計測値を読み出して不要信号補正値を算出し、これを受信信号から差し引くことで不要信号の影響を低減するように構成されている。本実施形態では、不要信号に送信信号12の反射波も含めて計測されるのを防止するために、不要信号を計測するときには送信部110を停止させて受信部120側だけを動作させるようにしている。これにより、不要信号のみを計測して記憶部103に記憶させておくことができる。
(もっと読む)
レーダ装置
【課題】所定の距離範囲の測定を短時間で処理可能なレーダ装置を提供する。
レーダ装置を提供する。
【解決手段】受信部120には、信号源として相関パルス発生源121とクロック発生源128を備えている。相関パルス発生源121で生成される相関パルス列は、パルス発生源111で生成されるパルスのパルス幅と等しいパルス幅の相関パルスを、A/Dコンバータ130でサンプリングを行うサンプリング周期Tsで複数個(L個)連続的に発生させる。また、クロック発生源128から出力されるクロック信号列は、上記の相関パルス列と同期しており、相関パルス列と同じサンプリング周期Tsでクロック信号をL個連続的に発生させる。このような構成とすることで、送信信号を1つ送出する度に、L個の異なる距離情報を取得できる。
(もっと読む)
検出装置
【課題】レーダによる物体検知範囲を広角範囲、または狭角範囲を切り替えて使用できるようにする。
【解決手段】アンテナ37−1は、電波を照射して送信信号を送信し、第1の間隔で1列ずつのアンテナが配置されたアンテナ51−2,51−3の対は、送信信号のうち、反射されてくる電波を受信し、第1の間隔よりも広い第2の間隔で、アンテナ51−1,51−2を1本のアンテナとし、アンテナ51−3,51−4を1本のアンテナとしたときのそれらの対は、送信信号のうち、反射されてくる電波を受信し、受信部12は、アンテナ51−2,51−3の対、または、アンテナ51−1,51−2とアンテナ51−3,51−4とをそれぞれ1本のアンテナとした対により受信された電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号をサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
レーダ装置
【課題】角度推定の精度やアンテナ感度を低下させることなく、ターゲットを検知可能な角度範囲を広くすることを課題とする。
【解決手段】アレーアンテナを有するレーダ装置1に、アンテナch1、ch2、ch6の何れかを送信アンテナとして電波を送信する送信部11と、アンテナch1−ch6を受信アンテナとして反射電波を受信する受信部12と、送信アンテナとして用いられるアンテナを、送信処理単位で切り替える制御部13と、を備え、アンテナch2−ch6は、隣接するアンテナに対して間隔dをおいて配置され、アンテナch1、ch2は、隣接するアンテナに対して間隔3/2dをおいて配置されることとした。
(もっと読む)
パルスドップラレーダ装置
【課題】高い距離分解能と目標物検出精度とを有し、目標物までの距離を高精度に測定することができるパルスドップラレーダ装置を得る。
【解決手段】パルス圧縮後信号に対して、パルス繰り返し周波数以下の範囲に通過帯域を制限する狭帯域フィルタ9と、狭帯域フィルタ9で通過帯域が制限されたパルス圧縮後信号に対して、パルス繰り返し周期をサンプリング周期とする周波数分析を実行する第2周波数分析部10と、第2周波数分析部10で周波数分析されたパルス圧縮後信号に対して周波数検出処理を実行し、目標物の周波数を検出する周波数検出部11と、レンジ−周波数の2次元マップ信号において周波数を目標物の周波数に固定し、目標物の周波数におけるレンジ方向の振幅の最も大きい点を、目標物のパルス繰り返し周期内の距離として検出する距離検出部12とを備えている。
(もっと読む)
レーダ装置
【課題】レーダビームの上下方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ3と、このレーダ3が接続されたECU2とを備えている。ECU2は、レーダ3によって検出された自車両の上方又は下方の正面に存在する物標の中から静止構造物を検出する。そして、ECU2は、検出された静止構造物Tの自車両Mに対する相対的な移動方向と自車両の進行方向とが成す上下方向の角度に基づいて、自車両の上下方向に対するレーダビームのずれ角Δθ(軸ずれ量)を算出する。
(もっと読む)
侵入検知装置および侵入検知方法
【課題】誤警報を防止し、簡単な構成で、侵入行為を検知することができるようにする。
【解決手段】侵入検知装置1は、自動車の車内への侵入を検知する装置である。電波センサ11は、物体に対して送信した信号と、その信号が物体に反射して返ってきた信号から得られるドップラ信号を出力信号として出力する。分散算出部23は、出力信号が2値化された2値化信号から生成された出力信号の周波数のヒストグラムに基づいて、出力信号の所定期間の周波数の分散値を算出する。振幅値抽出部25は、出力信号の振幅値の所定期間における最大値を抽出する。侵入判定部26は、出力信号の所定期間における周波数の分散値および最大値のそれぞれを、対応する閾値と比較することにより、車内への侵入の有無を判定する。本発明は、例えば、自動車に搭載される車載装置に適用できる。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】最小限のリソースで速度の分離精度を高めることの可能なレーダ信号処理装置を提供すること。
【解決手段】受信信号に対してドプラフィルタ処理部2により粗くドプラフィルタ処理を施し、各フィルタバンクにおける信号強度を用いた重心計算により、強度分布のピーク位置を得る。そしてこのピーク位置から特定したフィルタバンクにつき最小限の周波数レンジで再度、高精細のドプラフィルタ処理を施す。
(もっと読む)
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2と、他方の表面に形成された、送信信号を電波ビームとして前方に放射し、被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の送受信電極31と、何れか一方の端子が接地電極2のみに接続され、送受信電極31にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、検波素子5の他方の端子と出力線路6は送受信電極31の異なる位置に各々、接続される。
(もっと読む)
水栓装置
【課題】
本発明は、上記問題を解決するために成されたものであり、より精度良く止水を行うことや吐水継続を行うことを実現するための水栓装置を提供する。
【解決手段】
本発明の水栓装置は、吐水部と、前記吐水部からの吐水流を受水する受水部と、電波の送受信により被検知体の情報を検知信号として収集するセンサ部と、前記センサ部からの検知信号に基づき、バルブの開閉により吐止水の制御を行う制御部と、を有する水栓装置であって、前記センサ部は、受水部側面に設置され、設置された受水部側面の略鉛直方向に対し、吐水部が設置された側面方向に傾けて電波を放射することを特徴とする構成。
(もっと読む)
車両用物体検知装置
【課題】 統合手段により複数の物体候補を一つに纏めたグループが二つに分離するとき、正しいトラッキングが行われるようにする。
【解決手段】 物体候補位置検出手段M2が物体候補の位置を検出すると、統合手段M3が予め定められた結合領域内に検出された複数の物体候補を一つのグループに纏める。統合情報記憶手段M7に記憶した物体候補の相対位置が変化して単一のグループが複数のグループに分離した場合には、トラッキング手段M5は、走行車線推定手段M8で推定した自車が走行する走行車線上に分離前グループを構成していた物体候補の何れかが引き続き検知されているか否かを判定するとともに、引き続き検知されていると判定された場合には、その物体候補を含む分離後グループと分離前グループとの間に連続性があると判定するので、自車線に検知されていたグループが他車線に分離されたグループに誤って関連付けられて不適切な車両制御が行われるのを防止することができる。
(もっと読む)
パルス圧縮装置
【課題】少ないH/W規模で目標のパルス圧縮による距離オフセットを補正する。
【解決手段】パルス圧縮装置は、ディジタル化レーダ受信信号を複数チャンネルに分配する分配器101、既定の視線方向速度のドップラ周波数ごとに参照信号をチャンネル対応に発生する参照信号発生器104、分配された受信信号を参照信号でパルス圧縮するパルス圧縮器103、パルス圧縮器の出力信号から目標信号を検出する目標検出器105、各チャンネルの距離オフセットの補正で同一と推定した目標信号のデータを抽出する相関データ抽出器106、複数のデータを、横軸にドップラ周波数を縦軸に各チャンネルの振幅値をとったグラフ上で、各プロットのカーブフィッティングで得たグラフの近似曲線のピーク値に対応するドップラ周波数を求めるピーク検出器107、ドップラ周波数に対応する目標速度を求めパルス圧縮による距離オフセットを算出して距離補正値を求める補正値算出器108を備える。
(もっと読む)
車両用異常診断装置、車両用異常診断方法、車両用異常診断装置付き車両
【課題】 制御処理手段の搭載数を少なくし、制御処理手段の異常を監視することができる車両用異常診断装置、車両用異常診断方法、車両用異常診断装置付き車両を提供すること。
【解決手段】 距離検出手段が検出した自車両と障害物との距離に基づき、制御処理手段の第2の演算周期を用いて自車両と障害物との相対速度を推定し、相対速度検出手段が検出した自車両と障害物との相対速度と、距離推定手段が推定した自車両と障害物との相対速度と、の差が設定値より大きい場合には、制御処理手段の演算周期が異常であると判定するようにした。
(もっと読む)
目標捜索信号生成方法および目標捜索装置
【課題】目標が目標捜索信号と同一方向へ移動する速度成分を持つ場合であっても、探知性能や距離分解能の劣化がないレーダ装置等の目標捜索装置を提供する。
【解決手段】一方向の目標の捜索にチヤープ変調された複数のパルスを送信するレーダ信号を生成する際に、パルス幅と距離分解能との一方または両方を{Pw(i)・Dr(i)=Pw(1)・Dr(1)±Ti・(λ/2)}の関係が該複数のパルス相互において保たれるようにし、目標がレーダ信号と同一方向へ移動する速度成分を有することによる受信信号のドップラーシフトを補償して、各受信信号の圧縮される時間位置を同一にする。ここに、Pw(1)、Pw(i):第1、第i番目の送信パルスのパルス幅、Dr(1)、Dr(i):第1、第i番目の送信パルスの距離分解能、Ti:第1番目の送信パルスと第i番目の送信パルスとの時間間隔、λ:送信電波の波長。
(もっと読む)
221 - 240 / 647
[ Back to top ]