
Fターム[5J070BA01]の内容
レーダ方式及びその細部 (42,132) | 相対運動に基づく測定 (704) | ドプラ周波数の測定 (647)
Fターム[5J070BA01]に分類される特許
181 - 200 / 647
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 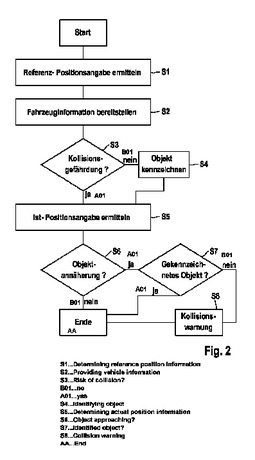 (もっと読む)
(もっと読む)
気象レーダ装置及び気象観測方法

【課題】突発的かつ局地的な気象現象を的確に観測できるようにする。
【解決手段】気象レーダ装置は、複数のアンテナ素子から電波を送信し、位相制御により仰角方向にビーム走査を行って気象目標からの反射波を受信するアンテナユニット11と、前記アンテナユニット11の開口面の仰角を駆動する駆動ユニット12と、前記駆動ユニット12により前記開口面を観測範囲の最大距離方向に正対させた状態で前記アンテナユニット11に前記ビーム走査を行わせ、前記反射波の受信信号をもとに前記気象目標を探知した時点で、前記駆動ユニットに前記開口面を前記気象目標に向けて正対させる監視制御装置4とを具備する。
(もっと読む)
電波センサ

【課題】検知領域内に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】高周波信号を生成する発振回路1と、誘電体からなる基板2の一方の表面または内部の略全面に形成された高周波信号のグランドとして作用する接地電極3と、他方の表面に形成された、高周波信号を受信または送受信するアンテナ電極(受信電極5または送受信電極6)と、何れか一方の端子がアンテナ電極の周波数を調整する周波数調整線路12を介してアンテナ電極に接続され、他方の端子が接地電極3に接続された、アンテナ電極にて受信した高周波信号を検波する検波素子7と、検波素子7にて検波された検知信号を外部に出力する出力線路8とを備え、アンテナ電極と周波数調整線路12の接続点から、接地電極3までの電気長は、高周波信号の周波数に対し基板2における4分の1波長の奇数倍である。
(もっと読む)
物体検出装置、情報処理方法、および、情報処理システム
【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
(もっと読む)
海洋表層の水質計測方法、水質計測装置及び水質計測プログラム
【課題】海洋レーダによって得られるデータを用いて海洋表層の塩分及び水温を計測することを可能にする。
【解決手段】基準時間帯の波浪が受信電力RSI0'に与える影響と計測時間帯の波浪が受信電力RSIm'に与える影響との変化分ΔS'を推算し、基準時間帯の波浪が受信電力RSI0'に与える影響と電気伝導度変動時間帯の波浪が受信電力に与える影響との変化分Δs'を推算し、電気伝導度変動時間帯の受信電力から変化分Δs'を差し引いた受信電力と電気伝導度変動時間帯の電気伝導度σとの間の関係の回帰関数f(σ)を推定し、RSI0'−RSIm'=ΔS'+{f(σ0)−f(σc)}(ただし、σ0:基準時間帯の電気伝導度)を用いて計測時間帯の電気伝導度σcの値を推算し、実用塩分を算出するようにした。
(もっと読む)
電波センサ
【課題】検知領域内に存在する被検知体の有無や移動状態を検出する、S/N比に優れた低消費電力、小型の電波センサを提供する。
【解決手段】第1アンテナ電極6から所定の間隔を設け配置され、第1アンテナ電極6にて励起され、被検知体に衝突し反射して戻ってきた電波ビームを受信する第2アンテナ電極5と、前記第1アンテナ電極6にて受信した高周波信号検波用第1検波素子7aと、第1検波素子7aにて検波された検知信号を出力する第1出力線路8aと、第2アンテナ電極5にて受信した高周波信号検波用第2検波素子7bと、第2検波素子7bにて検波された検知信号を出力する第2出力線路8bとを備え、第2検波素子7bの一方の端子は接地電極3に接続され、他端子は第2アンテナ電極5に接続され、第2出力線路8bは、第2アンテナ電極5が励振した時に生じる電界が略最小となる前記第2アンテナ電極の位置に接続される。
(もっと読む)
人体検知装置
【課題】前方の第1のエリアの感度を大きく低下させることなく、第1のエリアに加え、第1のエリアとは別の第2のエリアにも検知エリアを設定する。
【解決手段】人体検知装置2は、ミリ波を放射するとともに人体や床や壁で反射された電波を受信し放射した電波の周波数と受信した電波の周波数との差から人の存否を判断するセンサ本体20と、センサ本体20から放射された電波の一部を反射する反射体30とを備える。センサ本体20は、前方の第1のエリアD1に向けて電波を放射し、反射体30は、第1のエリアとは別の第2のエリアD2に向けて電波を反射し、第1のエリアD1および第2のエリアD2を検知エリアに設定する。
(もっと読む)
レーダ装置
【課題】レーダ装置における演算処理の負荷を軽減しつつ、ターゲットまでの距離を推定する。
【解決手段】複数の周波数を有する送信信号を送信波として出力する送信アンテナ14と、物体からの送信信号の反射波を受信する複数の受信アンテナ16と、送信アンテナ14から送信された送信信号と受信アンテナで受信された受信信号とを混合するミキサ20と、を備えるレーダ装置100で、複数の周波数の送信信号の各々について受信アンテナ16の各々で受信された受信信号に対してミキサ20で得られるビート信号を周波数解析すし、ドップラ周波数を検出し、ドップラ周波数毎に、受信アンテナ16と送信信号の周波数との組み合わせ毎に検出されたドップラ周波数の位相情報を受信アンテナ16及び複数の周波数について定められた順に並べた行列とその複素共役転置行列とから相関行列を求め、相関行列に基づいてターゲットまでの距離を推定する。
(もっと読む)
不審者検知装置、不審者検知システム及び不審者検知方法
【課題】複数の不審者が侵入した場合においても、不審者の数及び不審者の位置を特定すること。
【解決手段】遅延時間変化解析部105は、広帯域なパルス信号が送信されてから、当該パルス信号が反射源により反射されて到来波として受信されるまでの遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分を抽出し、反射源判定部106は、入力される到来波の遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分に基づいて、到来波の反射源が、人体等の呼吸、心拍を伴う動体か、壁又は什器等の固定物体かを判定するようにした。また、送信パルスに広帯域なUWBパルス信号を用いることにより、時間軸上で到来波が分離されるため、エリア内に侵入した不審者を検知し、不審者の数を検出することができる。
(もっと読む)
スプリットビーム方式合成開口レーダ
【課題】複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にできるため、小型航空機やヘリコプタ、リモコンで操縦可能な無人飛行機等にも搭載できるスプリットビーム方式合成開口レーダを提供する。
【解決手段】放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている2つのマイクロ波によるチャープ波を照射帯に向けて同時に照射する2つの一次放射器11,12を備えるとともに、照射帯からの反射波を2系統独立に受信するスプリットビーム送受信アンテナと、受信した2系統の反射波からの画像データの振幅差に基づき、静止物体の画像を除去して移動体の画像のみを抽出する手段と、抽出された移動体の画像に基づいて当該移動体の位置と速度を同定する手段とを備えたスプリットビーム方式合成開口レーダ。
(もっと読む)
移動物体検出装置
【課題】昆虫などの小型の移動物体の誤検出を容易に防止できる。
【解決手段】判定回路89は回転角の積算値と小型移動物体O1が受波範囲A1を通過する際に同一方向に移動する移動距離に対応して設定された閾値とを比較し、積算値が閾値未満であるときは移動物体無しと判定する。さらに判定回路89は継続時間Txと小型移動物体O1が受波範囲A1を通過する際に要するであろう時間に対応して設定された基準時間とを比較し、継続時間Txが基準時間未満であるときは移動物体無しと判定する。故にドップラー信号E,E’の継続時間Txだけではなく、ドップラー信号E,E’から算出される移動物体の移動方向や移動距離も考慮して判定するので、受波器4の近傍における受波範囲A1を移動する小型移動物体O1の誤検出を容易に防止できる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】
車載レーダ装置の受信感度の低下を正確かつ迅速に検出する。
【解決手段】
車両に搭載されるとともに前記車両周囲に送信信号を送信して物標に反射された前記送信信号を受信するレーダ送受信機の信号処理装置において、前記車両に搭載された画像認識手段が前記物標の撮像画像に基づき前記物標の種別と距離とを検出し、受信感度監視手段が受信信号のレベルまたは前記受信信号から生成される信号のレベルが前記物標の距離と種別とに対応づけられた基準レベル以上であるか否かを検出するので、受信信号や受信信号から生成される信号のレベルに適切な基準レベルを適用できる。よって、受信感度の低下を正確かつ迅速に検出できる。
(もっと読む)
レーダ装置
【課題】高精度に目標を観測できるレーダ装置を提供する。
【解決手段】第1送受信兼用素子と第2送受信兼用素子とに分割された送受信兼用素子11aと、第1受信専用素子と第2受信専用素子に分割された受信専用素子12aを備えたアンテナ10と、観測角度範囲を複数に分割して、アンテナの各素子により、分割した角度範囲の各々を覆うように送信ビームを形成し、受信は、アンテナの各素子のビーム指向方向を第1送受信兼用素子と第2送受信兼用素子と同じ方向にして、第1送受信兼用素子と第1受信専用素子、第2送受信兼用素子と第2受信兼用素子により、ΣとΔの位相モノパルスビームを形成して複数の角度範囲の各々を覆い、第1送受信兼用素子、第2送受信兼用素子、第1受信専用素子および第2受信専用素子により、狭ビーム幅のビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37を備える。
(もっと読む)
レーダ装置
【課題】アンビギュイティが発生した場合にも、高精度ドップラー補正を行い、超分解能測距精度の改善を図るレーダ装置を得る。
【解決手段】周波数をステップ状に変えて電波を生成し、目標で反射した電波を受信する送受信系(10、2〜6)と、受信した前記電波に基づいて目標を検出する目標検出処理系(7、20、30)と、目標信号のドップラー周波数がドップラー帯域幅の範囲外に存在することに起因して発生する速度アンビギュイティを考慮して、ドップラー効果に起因する目標信号の位相回転を補正し、補正後の目標信号の送信周波数方向に対する位相変化に基づいて速度アンビギュイティを解き、目標の超分解能測距を行う超分解能処理系(40、50)とを備える。
(もっと読む)
レーダ装置及びレーダ信号処理方法
【課題】捜索時に素早く目標物を探知し、検定時に目標物までの距離を正確に測距することが可能なレーダ装置及びレーダ信号処理方法を提供する。
【解決手段】まず、パルス信号生成部10に対して高PRFを指定する。そして、高PRFに従って生成された変調パルス信号による反射波に対して、FFT処理部72でFFT処理を施すことによりクラッタ抑圧を行い、捜索処理部73で目標物の捜索を行う。捜索処理部73は、この捜索で目標物が探知された場合、この目標物のドップラ周波数に基づいて低PRFを選択する。続いて、パルス信号生成部10に対して、選択された低PRFを指定する。そして、低PRFに従って生成された変調パルス信号による反射波に対して、MTI処理部74でクラッタ抑圧を行い、検定・追跡処理部75で捜索処理部73により探知された目標物の検定を行う。
(もっと読む)
検出装置、検出方法および検出プログラム
【課題】線状導体の先端付近に観測空間が無くても、その先端付近における状況を把握できるような検出装置を提供する。
【解決手段】吐出針Nの先端における液体の吐出状況を検出する検出装置100において、空胴共振器11にマイクロ波周波数の電磁波の定在波をTM01モードで励起し、このTM01モードの回転磁界の中心に沿って配置された吐出針Nに電磁誘導によってマイクロ波周波数の交流電流Iを流す励振部10と、交流電流Iが流れることによって吐出針Nから放射される電磁波を受信する受信部20と、受信部20の受信した電磁波に基づいて吐出針Nの先端における吐出の有無や吐出量を検出する検出部30を備える。
(もっと読む)
FM−CWレーダ装置および数値補正方法
【課題】安価なAD変換器を用いて、スプリアスの少ないFM−CWレーダ装置を得る。
【解決手段】FM−CWレーダ装置が有するAD変換器に対して正確な試験用電圧を印加した際にAD変換器より出力されたコードと印加した電圧値とを対応付けたテーブルを記憶するADコード補正手段を設ける。そして、ADコード補正手段は、AD変換器より出力されたコードを取得し、取得されたコードと対応付けられた電圧値を出力する。FM−CWレーダ装置は、ADコード補正手段より出力された電圧値を用いて、目的物の相対速度および距離等を計測する。
(もっと読む)
車載レーダー装置
【課題】同一方式、同一周波数帯のレーダー波が混在する環境にあっても、自車からの送信波の反射波たる受信波の識別を容易として、要求されるレーダー機能を適正に維持することのできる車載レーダー装置を提供する。
【解決手段】送信アンテナ150からFM−CW方式の時分割信号として送信される送信波の送信区間とする時間および送信停止区間とする時間を制御する送信区間コントローラ110と、受信アンテナ210を介して受信される受信波のパワーを検出するパワー検出部240と、その検出されるパワーが受信処理の可能なレベルに対して設定された閾値を上回ると判断され続ける持続時間と、送信区間コントローラ110により制御される送信区間とする時間とが一致するとき、送信波の反射波たる受信波を受信していると判断するパワー判断部250とを備える。
(もっと読む)
風計測装置
【課題】所望の風成分の風速を、比較的小さな演算量で、かつ高精度に推定することができる風計測装置を得る。
【解決手段】目標物で反射されて受信される受信信号のドップラ周波数から得られるドップラ速度に基づいて、遠隔点の風速を計測する風計測装置10であって、受信信号を周波数変換してドップラスペクトルを算出するドップラ速度算出部1と、ドップラスペクトルおよび推定条件に基づいて、スペクトルパラメータを推定する第1スペクトルパラメータ推定部3と、受信信号が得られた付近の領域における背景情報、およびスペクトルパラメータを推定する際の制約条件を、推定条件として第1スペクトルパラメータ推定部3に入力する推定条件入力部2と、スペクトルパラメータから所望の風成分を抽出し、この所望の風成分のドップラ速度を算出するスペクトルパラメータ判定部4とを備える。
(もっと読む)
181 - 200 / 647
[ Back to top ]