
Fターム[5J083AC30]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 目的 (2,021) | 高速化 (96)
Fターム[5J083AC30]に分類される特許
1 - 20 / 96
情報提供システム、音響信号出力装置、コンピュータ用プログラム、携帯機器用プログラム、データ伝送方法及び情報取得方法
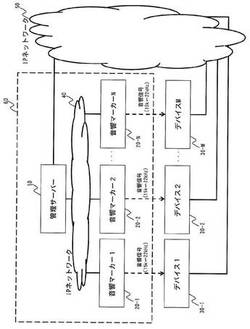
【課題】 屋内や地下空間をも運用環境とすることができ、携帯機器の使用者の歩行による移動にも対応可能であり、運用環境の景観も害することなく、携帯機器へ位置情報等を提供する。
【解決手段】 情報提供システムは、可聴周波数の上限域を利用する音響信号を出力する機能を有し、各々の音響信号が届く範囲が異なるように互いに離れて設置された、複数の音響信号出力装置と、各々の音響信号出力装置に対し、伝送すべきデータを指定するための、少なくとも一つの管理サーバーとを含む。各々の音響信号出力装置は、可聴周波数の上限域を利用する周波数域に含まれる所定数の周波数から、管理サーバーにより指定されたデータに対応する一つ又は複数の周波数を選択し、選択された周波数の正弦波を音響信号として出力する。携帯機器は、可聴周波数の上限域を利用する音響信号を受信する機能を有し、受信した音響信号の周波数を検出し、検出された一つ又は複数の周波数により表されるデータに基づいて、情報を求める。
(もっと読む)
超音波距離計測装置及び超音波距離計測方法

【課題】物体までの距離を高速かつ正確に計測することができる超音波距離計測装置及び超音波距離計測方法を提供する。
【解決手段】スペクトル拡散方式で物体Oの位置を計測する超音波距離計測装置である。第1の拡散符号により変調した第1超音波信号、・・・、第Nの拡散符号により変調した第N超音波信号を、一定時間毎に発生させる符号化信号生成手段1と、超音波信号を送信する超音波送信手段2と、物体に反射した超音波反射信号を受信する超音波受信手段3と、超音波信号の送信から受信までの時間を測定する計測手段5と、超音波反射信号と前記第1の拡散符号、・・・、及び第Nの拡散符号との相関を夫々計算し、超音波反射信号を受信した特定時に相関ピークを有する拡散符号により符号変調した超音波信号について、超音波信号が特定時前に最後に送信された送信時から、特定時までの時間差に基づいて、超音波受信手段から物体までの距離を演算する演算手段4とを備えた。
(もっと読む)
物体検知装置
【課題】応答性が低下することを抑制できる物体検知装置を提供する。
【解決手段】通信線53を介して通信可能に設けられたマスタ装置10とスレーブ装置20,30,40とを備えた物体検知装置である。スレーブ装置20,30,40は、マスタ装置10からの指示に応じて、車両の周辺に検知波を送波し、この検知波が物体によって反射してきた反射波を受波するとともに、反射波に基づいて物体を識別するための複数の情報を測定する。そして、スレーブ装置20,30,40は、測定された複数の情報のうち、マスタ装置10から指示された情報のみを物体を識別するための情報として含む測定結果を送信する。マスタ装置10は、スレーブ装置20,30,40に対して、検知波の送波を指示するとともに、送信させる情報を指示する。
(もっと読む)
セクタースキャン方式のソナー
【課題】 解決しようとする問題点は、振動子を戻す数秒間は超音波の送受信はできないため、表示画像を更新できず、画像の表示がスムーズでなく、見にくいという点である。
【解決手段】 メイン制御部12の駆動パルス送信部12aから超音波振動子5をセクタースキャン及び戻り駆動するための信号をモータ駆動部6に送信し、メイン制御部12の戻り時間検出部12bで戻り時間を検出し、戻り時間割り当て部12cで戻り時間をセクタースキャンのスキャン毎に割り当て、駆動パルス送信部12aからの出力で、発信パルス送信部12dから発信器8に発信パルスを送信し、戻り時間割り当て部12cは割り当て時間調整部13に割り当て時間を送信し、割り当て時間調整部13はメモリ11からの読み出されたデジタル信号をメイン制御部12の戻り時間割り当て部12cから割り当てられた時間で調整され、画像信号変換部14は割り当て時間調整部13から出力されたデジタル信号を画像信号に変換し、表示部15で表示する。
(もっと読む)
超音波距離測定装置および輸送機器
【課題】測定対象までの距離を迅速に測定することが可能でかつ超音波の多重反射による測定精度の低下が防止された超音波距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】送信素子50は、各測定期間において、超音波を送信する。受信素子60は測定対象で反射された超音波を受信し、受信した超音波の強度に対応する受信信号を出力する。反射時間測定部90は、各測定期間において、受信信号の第1の反射成分の時間軸上の位置に基づいて測定対象までの距離に対応する時間を算出する。ピーク保持部110は、第1の反射成分の最大値を保持する。可変電源140は、保持された最大値に基づいて、次の測定期間において受信信号に第1の反射成分が出現するとともに第2の反射成分の出現が抑制されるように、次の測定期間において送信素子50により送信される超音波の強度を調整する。
(もっと読む)
フーリエ変換でのサンプル数を削減した、短時間信号のピークパワースペクトルを検出する方法及び装置
【課題】測定対象とする時間範囲の分解能を高めつつ周波数分解能を高め、しかもフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、演算量を減らす。
【解決手段】受信信号を変調器5によって周波数変換し、アナログフィルタ7を介して周波数変換後の信号をA/D変換器61によりオーバーサンプリングでデジタル信号に変換し、デジタルBPF62により所望の周波数帯域幅Δfpに相当する成分を抽出し、抽出された信号をダウンサンプリング部63により最低周波数帯域にダウンサンプリングする。その後、信号切り出しゲート11により、ダウンサンプリング部63からのデジタルデータ列を所望の時間幅内で切り出し、周波数分解能を満たすようにゼロ付加部12によってゼロデータを付加し、ゼロデータが付加されたデジタルデータ列に対しFFT処理部13によって高速フーリエ変換を行う。
(もっと読む)
超音波送受信装置、定量検出方法、および魚量検出方法
【課題】短時間で正確に魚量を計測できる超音波送受信装置を実現する。
【解決手段】魚群探知機に相当する第1超音波送受信部21は、船舶の鉛直下方向へ第1超音波信号を送信し、魚群に反射して得られるエコー信号を出力する。ソナー装置に相当する第2超音波送受信部22は、船舶の下方向の所定範囲に第2超音波信号を送信し、魚群に反射して得られるエコー信号をビーム形成したビームエコー信号を出力する。演算部30は、エコー信号から得られる魚群のエコー強度に関するデータと、エコービーム信号から得られる魚群の大きさに関するデータから、魚量を算出する。
(もっと読む)
水底下物体の探査類別方法
【課題】探査と類別の計測時間を短縮可能な水底下物体の探査類別方法を提供する。
【解決手段】予め、形状や材質の異なる複数の既知の水底下物体21を用い、水中航走体2を既知の水底下物体21の周りで直線状あるいは曲線状に航行させたときの散乱波のレベルパターンを作成してデータベースとして蓄積しておき、水中航走体2を、測定対象の水域で直線状あるいは曲線状に航行させつつ、送波器3から音波を送波して散乱波の計測を行うと共に、水中航走体2を、測定対象の水域で格子状に縦横に航行させて、測定対象の水域中の任意の測定点に対して散乱波の計測を行うようにし、計測した散乱波の強度から水底下物体21を検知すると共に、計測した散乱波の強度を基に散乱波のレベルパターンを作成し、当該散乱波のレベルパターンをデータベースと照合することで、水底下物体21の類別を行う。
(もっと読む)
機雷掃海システム
【課題】 機雷探知機において、目標物が含まれた信号から目標物信号成分を自動で検出するための信号処理装置と、目標物が含まれた信号を送信する水中音響通信装置を提供する。
【解決手段】 エコー信号に対してウェーブレットパケット変換を適用し周波数分解を行うことによって、目標物からのエコー信号成分が多く含まれていると予測されるものと、そうでないものとに分類する。そうでないものとされた信号成分はすべて0に置換し、また、予測された信号の主要な成分のみをさらに抽出し、その信号成分のみを用いて逆ウェーブレットパケット変換を行い、再構成を行う。これにより、予測信号の中に目標信号があればその成分だけ抽出することができる。さらに、前記手段で発見された目標物の付近の情報のみを音波を用いて転送する。目標物探知を精度良く行い、その結果のみを転送することにより、帯域に多大な制限を受ける水中音響通信においても、そのリアルタイムでの運用が現実的になる。
(もっと読む)
シーンを検知するための方法及びシステム
【課題】少数のトランスデューサーアレイによって広帯域超音波周波数を有するパルスを送信し、物体を検出する方法を提供する。
【解決手段】トランスデューサーのアレイによってパルスがシーン内に送信される。各パルスは広帯域超音波周波数を有し、該パルスは同時に送信され、各パルスの広帯域超音波周波数のパターンは、他の各パルスのパターンに対して一意である。パルスがシーン及び該シーン内の物体によって反射され、該パルスが受信される。各受信パルスをフーリエ変換を用いてサンプリング及び分解して、周波数係数を生成する。該周波数係数をスタックし、シーン及び物体の反射率をモデリングする線形システムを生成する。次に、線形システムに復元方法を適用して、シーン及び物体の反射率を復元する。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
水中作業管理装置
【課題】水中ポジショニングシステムを利用した水中作業において、潜水士に喚起する手段、例えば、警報や退避指示を水中ポジショニングシステムから直接送る伝達手段を提供する。
【解決手段】水中作業管理装置は、船11に設けた送受波器12から発射される超音波を、潜水士13が携帯するトランスポンダ14で受信し、該受信した信号に対応する超音波信号を発射し、該発射した超音波信号を前記船に設けた送受波器で受信することで、前記潜水士が携帯するトランスポンダの位置を測定する水中ポジショニングシステムであって、前記トランスポンダに、前記送受波器から発射される特定の超音波信号を受信するとバイブレートするバイブレーション機構16を備えたことである。
(もっと読む)
超音波探知システム
【課題】従来のクラゲ探知システムでは1フレームの画像を取得するため非常に時間がかかるので、短時間で観測できる超音波探知システムを提供する。
【解決手段】超音波振動子6aで受信した反射波データをメモリ6dから読み出し、制御回路9の複数個の信号を1つの信号とするグループ化機能でグループ化し、グループ化された信号を上限値ゲート機能に入力して強い反射波をカットし、下限値ゲート機能に入力して弱い反射波をカットし、上限値及び下限値がカットされた出力データを第1の判別機能に入力し、出力データが規定値より多いかどうかが判断され、多ければクラゲと判断され警報信号が出力され、出力データが第2の判別機能に入力され、予め決められた時間以上存在するかどうかが判断され、存在する場合はクラゲと判断されて警報信号が出力され、第1、第2の判別機能の両方から警報信号が出力された場合にのみ、警報機に信号が出力される。
(もっと読む)
音響波イメージング装置または音響波イメージング方法
【課題】音響波イメージング装置において、CMP法による計算を高速処理するための技術を提供する。
【解決手段】複数の音響波受信素子による受信信号の位相を揃える整相部と、位相が揃えられた受信信号を複素信号化する複素信号化部と、複素信号の相関行列を計算する相関行列計算部と、相関行列と予め定められた拘束ベクトルとを用いて受信信号の拘束付最小電力を計算する電力計算部とを有し、相関行列計算部は、所定の周期で前記相関行列を計算して電力計算部に順次出力するものであり、電力計算部は、入力された相関行列のそれぞれを用いた拘束付最小電力計算を並行的に行うものである音響波イメージング装置を用いる。
(もっと読む)
フェイズドアレイ合成開口ソナーシステム
【課題】ソナー画像の精度を上げつつ、処理速度を落とさないことを目的とする。
【解決手段】プラットフォーム12に複数設置されている受信素子31から入力された受信データを、同時に受信したデータ毎に複数のフェイズドアレイ処理装置9に分散するフェイズドアレイ振分装置8と、受信データに対するフェイズドアレイ処理を並列に行なう複数のフェイズドアレイ処理装置9と、複数のフェイズドアレイ処理装置9から出力されたフェイズドアレイ処理結果を、受信データの受信順に合成開口処理装置11へ送るデータシェーピングバッファ装置10と、送られた複数のフェイズドアレイ処理結果を用いて合成開口処理を行なう合成開口処理装置11と、を有することを特徴とする。
(もっと読む)
波動源位置演算方法及び波動源位置演算装置
【課題】外乱による影響を取り除き、波動源位置の演算精度を高めることができる波動源位置演算方法を提供する。
【解決手段】観測点において、波動源が放射する波動信号を検出し、当該波動源の位置を演算する波動源位置演算方法であって、波動信号を時間周波数の離散信号に変換する工程と、離散信号を用い、波動信号の振幅成分、波動信号の振幅の微分成分、または、波動信号の空間的な勾配の少なくとも一つのパラメータを含む式により、時間周波数毎に、波動源の位置を表す位置推定値を演算する位置推定値演算工程と、当該式を用いて表される評価関数に位置推定値を代入して、評価関数の値に応じて、時間周波数の帯域を制限するマスキング関数を設定するマスキング関数設定工程と、マスキング関数により時間周波数の帯域に制限をかけるマスキング工程と、位置推定値から波動源の位置を演算する波動源位置演算工程とを含む。
(もっと読む)
水中航走体の位置較正方法及び装置
【課題】 音響通信の速度が限られていても精度よく較正できるようにする。
【解決手段】 水中航走体6を、緯度方向位置検出用経路22と経度方向位置検出用経路23に沿って航走させながら、支援船7側より音響測位を行う。得られた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yのみを、音響通信を介して水中航走体6の水中航走体制御装置15へ与える。水中航走体制御装置15では、緯度方向と経度方向の各位置検出用経路22,23を航走したときに水中航走体6が自身で計測していた慣性航法位置d4の緯度成分と経度成分の代表値d5x、d5yを求め、これを支援船7側より与えられた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yより減算して緯度方向と経度方向の偏差δx,δyを求め、この緯度方向と経度方向の偏差δx,δyにより水中航走体6が自身で計測していた慣性航法位置d4を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 慣性航法位置の較正に要する音響測位回数及び水中航走体のエネルギー消費を低減させ、音響測位精度を向上させる。
【解決手段】 水中航走体6を、定点保持又は着底により海底21に対する相対位置変化を停止させる。この状態で、支援船7側からの音響測位を複数回行い、各計測結果における緯度方向の平均と経度方向の平均を求めて、水中航走体6の統計的に正しい緯度と経度を備えた音響測位位置を求める。又、水中航走体6自身による慣性航法に基づく測位を行い、その緯度及び経度について、音響測位位置の緯度及び経度と比較して、緯度方向と経度方向の偏差をそれぞれ求め、求められた緯度方向及び経度方向の偏差により、水中航走体6自身による慣性航法に基づく緯度と経度のデータを較正させる。更に、音響測位時に支援船7を水底付近に停止させた水中航走体6の鉛直線上付近に保持することで音響測位精度を向上させる。
(もっと読む)
水中航走体の位置較正方法
【課題】狭い領域で運用する水中航走体についても、精度よく較正できるようにする。
【解決手段】水槽22内で運用される水中航走体について、水槽22の短辺22aと長辺22bに平行に沿わせて位置検出用経路23aと23bを長く設定する。水中航走体を自身で検出する慣性航法位置を基に各位置検出用経路23aと23bに沿って航走させるときに、支援船側より音響測位を複数回行う。上記各位置検出用経路23aと23bごとに、得られる音響測位位置D4と、慣性航法位置について、それぞれ直交する方向の代表値を求め、求められた両代表値の差として、各位置検出用経路23a,23bに直交する方向に関する慣性航法位置の偏差δxとδyをそれぞれ求め、この偏差δx,δyにより水中航走体が自身で測位する慣性航法位置を較正させる。
(もっと読む)
目標運動解析方法及び目標運動解析装置
【課題】目標運動解析の解の収束を早め、解の精度を向上させること。
【解決手段】本発明の目標運動解析方法は、センサにて前記目標を探知する探知ステップと、前記センサにて探知された前記目標の探知方位及び探知周波数、該探知された探知時刻、及び、該探知時刻における前記センサの位置情報を含む目標探知情報を生成する生成ステップと、前記センサにて信号を受信可能な探知領域を計算する計算ステップと、前記センサの目標探知情報及び探知領域を使用し、前記センサの探知領域と前記目標の探知方位とが重なる領域を前記目標の存在圏と限定した上で、前記目標の位置を推定する第1の推定ステップと、を有する。
(もっと読む)
1 - 20 / 96
[ Back to top ]