
Fターム[5J083AD17]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 角度 (341) | 方位 (308)
Fターム[5J083AD17]の下位に属するFターム
音波到来方位 (164)
Fターム[5J083AD17]に分類される特許
1 - 20 / 144
信号検出装置、信号検出方法及び信号検出プログラム
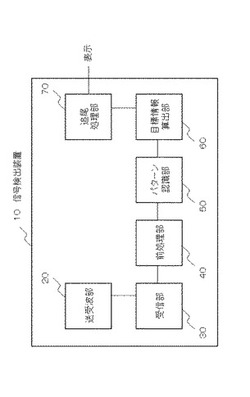
【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
車両用物体認識装置

【課題】超音波センサの照射範囲内の複数方向に検出点を設定し、それらの点から正確に位置が検出された点を抽出することで、超音波センサを用いた物体形状認識の精度を向上させるとともに、これに伴うコストの低減を図る。
【解決手段】超音波センサを用いて物体の形状を認識する車両用物体認識装置1において、物体形状推定部8により、円錐状に広がる所定の照射範囲を横断した扇状の水平面の少なくとも一方側および他方側臨界線近辺の対象線のうち、超音波センサ2,3による自車両からの検出距離で、一方側および他方側対象線上それぞれに検出点を設定し、自車両の移動に伴って繰り返し設定された各検出点それぞれを繋ぎ合わせて物体上の検出点軌跡を生成し、生成された検出点軌跡それぞれに基づいて検出範囲を形成し、形成した各検出範囲の重複部分を物体の形状と認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
目標接近探知端末装置
【課題】警戒区域内に効率よく設置ができ、警戒区域内に接近した目標体を音声や映像等により探知することのできる目標探知装置を提供すること。
【解決手段】飛翔体により目標体の探知を行う所定の区域の上空から散布されて設置される探知端末1に、レンズ部4a撮影方向調節機構4bを有するカメラ4、太陽電池6、GPS6、音響センサ10、通信部12、パラシュート16を備え、制御部14の制御の下、カメラ4、GPS6、及び音響センサ10より取得した情報を外部端末に送信する。
(もっと読む)
アクティブソーナー装置及びその信号検出方法
【課題】アクティブソーナー装置において、移動速度が小さな目標物であっても残響等から分離して確実に検出できるようにする。
【解決手段】音響信号を受波信号として受波することと、受波信号に対して周波数解析を行うことと、検出における単位周波数幅及び単位時間幅の領域をセルとして、周波数解析の結果に基づきセルごとに受波信号の到来方位と強度とを求めることと、強度が第1のしきい値を超えているセルが周波数方向または時間方向に隣接する場合に、その隣接するセルにおける到来方位の差が第2のしきい値以内かどうかを判定し、第2のしきい値以内である場合に、隣接するセルを1つの検出として連結することと、実行する。
(もっと読む)
アクティブソーナー装置及びその信号処理方法
【課題】アクティブソーナー装置において、目標をより確実に検出できるようにする。
【解決手段】アクティブソーナー装置における信号処理方法は、第1の時間幅を有する音波信号を媒質に送波することと、媒質を伝播してきた音波信号を受波音波信号として受波することと、受波音波信号の時間軸を第1の時間幅よりも短い第2の時間幅で区切ったものをそれぞれ時間セルとして、各時間セルごとに、受波音波信号の到来方位と強度とを求めることと、各時間セルごとに、その時間セルを含む複数の連続する時間セル内での到来方位の方位集中度を算出し、その時間セルでの強度に方位集中度を重み付けしたものを検出値とすることと、を有する。
(もっと読む)
パッシブソナー信号処理装置、パッシブソナー信号処理方法及びパッシブソナー信号処理プログラム
【課題】ブラインドゾーンもゴーストも発生しないパッシブソナー信号処理装置を提供する。
【解決手段】信号のレベルの方位チャネル間の増減比を計算する微分処理手段と、前記増減比の値に基づいて決められた区間毎に、該区間に含まれる方位チャネルの前記増減比を基に、合計増減比を計算する積分処理手段と、前記合計増減比の値に基づいて選択された相互に異なった複数の方位チャネルの前記合計増減比に基づいて、前記信号のS/N比を計算するS/N検出処理手段と、を備える。
(もっと読む)
超音波を用いた波浪計測方法および波浪計測システム
【課題】波浪が高い場合でも、精度良く計測し得る超音波を用いた波浪計測方法を提供する。
【解決手段】海面に配置された海洋構造物1及びブイ3の海面下に設けられた第1,第2超音波送受信機2,4から海中に超音波を発信し、海面下に配置された3つの音波中継器5からの超音波を受信し、超音波の片道伝播時間に基づき音波中継器と両超音波送受信機との間の距離をそれぞれ検出すると共に両距離データの差を求め、この差にハイパスフィルタ処理を施して短周期変動成分を抽出し、超音波送受信機の音波中継器に対する方位角及び俯角を係数とする両超音波送受信機間の相対変位ベクトルの三次元座標軸の変位を未知数とする式が上記抽出された短周期変動成分に等しくなるようにした三元一次方程式を各音波中継器毎に作成し、この三元一次連立方程式を解いて短周期変動成分の高さ方向の変位を求めて波浪高さを得る方法である。
(もっと読む)
電子装置、硬さ算出方法、及びプログラム
【課題】音波を用いることにより、物体の硬さを検出する。
【解決手段】発振部110は、センサ用音波を発振する。検出部120は、物体で反射したセンサ用音波を検出する。距離算出部130は、発振部110がセンサ用音波を発振してから検出部120がセンサ用音波を検出するまでの時間に基づいて、物体までの距離を算出する。硬さ算出部140は、検出部120が検出したセンサ用音波の強度、及び距離算出部130が算出した距離に基づいて、物体の硬さを算出する。
(もっと読む)
超音波センサー、および電子機器
【課題】 被検出物の検出精度が良好な超音波センサー、および電子機器を提供する。
【解決手段】 超音波センサー10は、超音波を送信する複数の送信素子21がアレイ状に配置された送信アレイ20と、被検出体で反射された超音波を受信する複数の受信素子31がアレイ状に配置された受信アレイ30と、を備え、前記受信アレイ30は、前記送信アレイ20の外周縁よりも外側に少なくとも3つ以上配置され、これらの受信アレイ30のうちいずれか1つは、他の受信アレイ30のうちいずれか2つを結んで形成される直線外に位置する。
(もっと読む)
水中目標物検出装置、該検出装置に用いられる目標物検出方法及び目標物検出プログラム
【課題】水中目標物検出装置での目標物のアスペクト及び方位、全長の推定精度を向上させる。
【解決手段】発振器31から送波器32に駆動信号adが与えられ、音波パルスapが送波される。受波器33により、音波パルスapが目標物20に到達したときの反射波の直接波df,de及びマルチパス波mf,meが合わせて受波されて受信信号wrが出力される。受波指向性合成部34により、受信信号wrが入力され、目標物20を指向するように受波ビームが指向性合成されて合成受信信号trが出力される。マルチパス補正部35により、合成受信信号trから、予め保持されているマルチパス波受信信号の時間幅を特定する情報を基にマルチパス波受信信号が除去され、直接波df,deに対応する直接波受信信号drが出力される。相関処理部36により、直接波受信信号drに基づいて、位相の相異なる直接波受信信号dr同士の相関値が算出されて目標物20が検出される。
(もっと読む)
波源推定装置及び波源推定方法
【課題】コヒーレント波である受信波を推定するとともに、演算負荷を低減できる波源推定装置を提供する。
【解決手段】波源推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源推定装置は、波源の初期推定を行い、初期推定に基づく受信波のモード行列の位相を回転して変換行列を求め、受信波の相関行列を変換行列によって平均化し、波源演算に必要な相関行列を算出する。そして、波源推定装置は、演算過程で算出した変換行列と、先に算出された平均化処理後の相関行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
超音波診断装置
【課題】超音波診断装置において、整相加算後の信号に含まれる不要波成分の抑圧を適切に行う。特に過剰な抑圧がなされないようにする。
【解決手段】スペクトル演算部34は、整相処理後(遅延処理後)かつ加算処理前の受信信号列に対して、素子配列方向に沿って信号レベルをサンプリングして複数のサンプリング値からなる波形を得て、それに対する周波数解析により方位スペクトルを取得する。方位特性処理部36は、方位スペクトルに対して、前記整相処理及び加算処理により生じる振動素子列の方位特性を用いた重み付け処理を適用することにより、重み付け後の方位スペクトルを生成する。係数演算部38は、重み付け後の方位スペクトルに基づいて不要波成分抑圧用の係数を演算する。乗算器40は、加算部28の出力信号に対して係数を乗算することにより不要波成分を抑圧する。乗算に代えて減算を利用することも可能である。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
車両方向特定装置、車両方向特定方法、及びそのプログラム
【課題】風切り音などの雑音によって車両音が埋れてしまう状況下でも、車両の存在する方向を特定する。
【解決手段】各々が、接続された検知用マイク101、102で取得された他車両音と雑音との混合音と、検知用マイク101、102の各々で取得される風雑音よりも低い音圧の風雑音が取得される位置に設置された参照用マイク103で取得された他車両音のフィルタ通過後の音信号との差が最小になるようにフィルタを生成しながら、参照用マイク103で取得された他車両音のフィルタ通過後の音信号を算出することにより、検知用マイク101、102で取得された他車両音が強調された音を抽出する複数の他車両音強調フィルタ部104、105と、複数の他車両音強調フィルタ部104、105で抽出された音の到達時間差又は音圧差から、自車両の進行方向に対する他車両が存在する方向を特定する他車両方向特定部108とを備える。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能とする障害物検出装置を提供する。
【解決手段】車両に搭載され、当該車両周囲の障害物を検出する障害物検出装置であって、車両の周辺に検出波を照射し、当該車両の周辺に存在する障害物から反射された反射波に基づいて当該障害物までの距離を検出する距離検出手段と時刻t1において距離検出手段から取得した障害物までの距離を第1の距離とし、時刻t1から所定時間経過後の時刻t2おいて距離検出手段から取得した障害物までの距離を第2の距離として、当該第1の距離および当該第2の距離の差分値に基づいて当該障害物の存在方向を算出する方向算出手段とを備える障害物検出装置である。
(もっと読む)
ビーム合成装置、ビーム合成方法及び円筒アレイ受信システム
【課題】広帯域信号に対するビーム合成を可及的に少ないハイドロフォン数で実現しつつ、高い周波数におけるグレーティングローブを低減させる。
【解決手段】受信周波数帯域の一番低い周波数にて所定のビーム幅を得る開口長で、かつ、受信周波数帯域の一番高い周波数よりも低い周波数の1/2波長の間隔で配列された複数のハイドロフォン1(1)〜1(n)からなるアレイと、各ハイドロフォン出力を所定の分解能で周波数分析するFFT2(1)〜2(n)と、所定の分解能で分割された周波数毎にビーム形成を行う整相処理手段3(1)〜3(k)と、周波数毎に形成されたビームを合成する合成処理手段4とを備える。
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
障害物検出装置
【課題】外部からの情報の取得を不要とすることで簡易な構成としながらも、障害物の形状及び移動体と障害物との相対位置を適切に特定する。
【解決手段】障害物検出装置1は、方位が零でないと判定し、距離変化量の絶対値が第1の所定値以上であり且つ方位変化量の絶対値が第2の所定値以下であると判定すると、障害物が平面形状物体であり、車両と障害物の平面とが斜めの相対位置であると特定し、一方、距離変化量の絶対値が第1の所定値以上でない又は方位変化量の絶対値が第2の所定値以下でないと判定すると、障害物が非平面形状物体であり、その障害物の方位が零でないと特定する。
(もっと読む)
砲撃体位置明確化のためのシステムおよび方法
【課題】超音速飛翔体の砲撃体を位置決めするための方法を提供する。
【解決手段】方法はアンテナを形成する5以上の間隔をあけた音響センサにより、衝撃波単独信号を計測し、かつタイミングエラー分布を推定し、単独信号から、センサ対に到着する時間差を、信頼度に基づいて決定することにより、飛翔体軌跡を得る。
(もっと読む)
1 - 20 / 144
[ Back to top ]