
Fターム[5J083AF05]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 自動車 (359)
Fターム[5J083AF05]の下位に属するFターム
Fターム[5J083AF05]に分類される特許
41 - 60 / 131
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 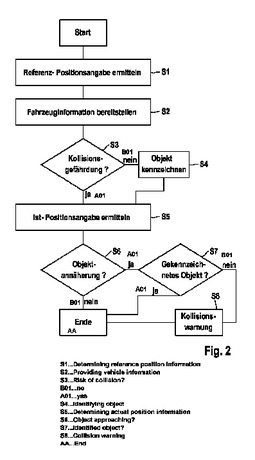 (もっと読む)
(もっと読む)
移動物体検出装置

【課題】設置のためのスペースを減らして設置場所の確保が容易な移動物体検出装置を提供する。
【解決手段】一つの超音波振動子20を用いた送波・受波兼用の送受波器2を備えているので、送波器3と受波器4がそれぞれ別の超音波振動子を用いている従来例と比較して小型化が図れ、その結果、設置のためのスペースを減らして設置場所の確保が容易な移動物体検出装置を提供することができる。
(もっと読む)
移動物体検出装置

【課題】昆虫などの小型の移動物体の誤検出を容易に防止できる。
【解決手段】判定回路89は回転角の積算値と小型移動物体O1が受波範囲A1を通過する際に同一方向に移動する移動距離に対応して設定された閾値とを比較し、積算値が閾値未満であるときは移動物体無しと判定する。さらに判定回路89は継続時間Txと小型移動物体O1が受波範囲A1を通過する際に要するであろう時間に対応して設定された基準時間とを比較し、継続時間Txが基準時間未満であるときは移動物体無しと判定する。故にドップラー信号E,E’の継続時間Txだけではなく、ドップラー信号E,E’から算出される移動物体の移動方向や移動距離も考慮して判定するので、受波器4の近傍における受波範囲A1を移動する小型移動物体O1の誤検出を容易に防止できる。
(もっと読む)
超音波受信モジュール、超音波距離測定システムおよび超音波距離測定方法、並びに書画カメラ
【課題】超音波を利用して距離を測定する超音波受信モジュール、超音波距離測定システムおよび超音波距離測定方法、並びに書画カメラを提供する。
【解決手段】超音波受信モジュール120は、少なくとも1つの超音波信号を受信する超音波受信端130と、超音波受信端130と電気的に接続され、時間の経過とともに増大する所定倍率を提供し、所定倍率により超音波信号の振幅を変更する信号増幅器140と、信号増幅器140と電気的に接続され、時間の経過とともに低減する閾値を提供し、振幅が閾値よりも大きな超音波信号の部分をキャプチャする測定モジュール150とを備える。
(もっと読む)
音源推定方法
【課題】車室内などの、室内モードの影響が大きい場所であっても、音源を精度よく推定することのできる音源推定方法を提供する。
【解決手段】複数のマイクロフォンM1〜M5とカメラ12とを一体化した音・映像採取ユニット10を一定の速度でゆっくりと移動させて、異音発生の指摘があった場所Pを中心に音と映像の情報を採取し、各マイクロフォンM1〜M5で採取した音の音圧信号を用いて音源方向(θ,φ)とを周波数毎に算出した後、音源方向のデータ(θkj,φkj)と音源の方向の推定に用いたときに撮影された映像の画像データGkとを合成して、推定された音源の方向を示す図形32が描画された音源位置推定画面33kを作成し、この音源位置推定画面33k中の上記図形32が集中的に描画されている箇所を上記異音の発生源の方向として、異音の発生源を特定するようにした。
(もっと読む)
物体検出装置
【課題】 送信波を送信してから物体が存在すると判定するまでの応答性を良くすることのできる物体検出装置を実現する。
【解決手段】 送信素子Aから送信され、受信素子C,Dにより受信された受信波は、それぞれ障害物以外からの反射波である不要波RC1〜RC3,RD1〜RD3と、障害物反射波RC4,RD4とから構成される。振幅(電圧)が閾値Vthを超えており、かつ、その閾値Vthを超えたときの受信時間の受信素子C,D間における受信時間差Δtが規定時間ta以下である障害物反射波RC4,RD4を検出したときに障害物が存在すると判定する。
(もっと読む)
車輛用ヘッドランプの光軸調整方法
【課題】車輛の進行方向前後に超音波発信器と超音波受信器とからなる超音波センサを有した傾斜測定装置を用い、走行中、前後の超音波センサが時間差を持って路面までの距離を測定する場合も、正確に傾斜測定装置の傾斜角度を測定し、車輛用ヘッドランプの光軸を正しく調整できるようにした、車輛用ヘッドランプの光軸調整方法を提供することが課題である。
【解決手段】前後の超音波センサで交互に前記路面までの距離Hf、Hrを複数測定し、それぞれの超音波センサによる測定結果の平均値を算出した後、該平均値により、前後の超音波センサの仮想路面に対する角度αを算出してヘッドランプの光軸を調整するようにした。
(もっと読む)
超音波センサ
【課題】高精度に超音波を発生することが可能な超音波センサを提供する。
【解決手段】超音波センサ10は、基板1と、第1および第2ねじれ梁11、12と、第1および第2回転フレーム71、72と、第1および第2駆動リンク梁31、32と、駆動フレーム21と、駆動電極5と、第1および第2振動リンク梁41、42と、振動フレーム22と、検出電極6とを備える。第1駆動リンク梁31は、第1回転フレーム71の一方端部側に第1ねじれ軸T1を移動した軸上に位置する。第2駆動リンク梁32は、一方端部側への第1ねじれ軸T1の移動の方向と逆方向に第2ねじれ軸T2を移動した軸上に位置する。第1振動リンク梁41は、第1ねじれ軸T1と交差する方向に沿って第1回転フレーム71の他方端部側に第1ねじれ軸T1を移動した軸上に位置する。第2振動リンク梁42は、一方端部側への第1ねじれ軸T1の移動の方向に第2ねじれ軸T2を移動した軸上に位置する。
(もっと読む)
電源制御回路
【課題】後段の機器へ電源電圧をそのまま供給することができ、且つ、小型化低コスト化が可能な電源制御回路を提供する。
【解決手段】電源電圧を、フィルタ回路52を通過させて出力する電源制御回路50において、一定電流を出力する定電流制御状態と、前記電源電圧に応じた電流を出力する直結状態とを切り替え可能なSW回路51をフィルタ回路52の前段に設け、このSW回路51を、電源投入時に一定時間、定電流制御状態とした後、直結状態とする。これにより、SW回路51が定電流制御状態とされている一定時間は、ラッシュ電流が抑制されてフィルタ回路52には一定電流が流れる。そのため、コイル521に、ラッシュ電流に耐えうる定格値のものを用いる必要がなくなることから、安価且つ小型のコイルを用いることができる。
(もっと読む)
物体検出装置
【課題】複雑な演算を行わず、単純回路で実現可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、送信信号として超音波を送信する送信部21と、夫々異なる位置に配置され、到達した超音波を夫々の受信信号として受信する複数の受信部22a〜22cと、1つの受信部22aにより受信された受信信号を基準受信信号とし、送信部21から超音波が送信されてから基準受信信号が受信されるまでの間の時間に応じた電圧を距離電圧として生成する距離電圧生成部25と、基準受信信号が受信された時点と1つの受信部22a以外の受信部22b及び22cにより受信信号が受信された時点との時間差に応じた電圧を角度電圧として生成する角度電圧生成部26と、距離電圧と角度電圧とに基づいて検出範囲内に物体が存在するか否かを判定する物体存在判定部28と、を備える。
(もっと読む)
移動体検出装置
【課題】回路規模の増大を抑えつつ監視空間の拡大が図れる移動体検出装置を提供する。
【解決手段】複数の送波器3を備えているので、従来では死角となっていた場所(例えば、ワンボックスタイプの自動車における3列目の座席周辺)にも連続エネルギ波(超音波)を行き渡らせることができるために監視空間の拡大が図れる。しかも、送波器3と受波器4の組を複数組備える場合と比較して、受波器4から出力する受波信号を処理する回路(位相検波回路6A,6Bやローパスフィルタ7A,7B、コンパレータ9A,9Bなど)を増やす必要がないために回路規模の増大を抑えることができる。
(もっと読む)
超音波センサ
【課題】ケーブルを容易に挟持させることができるとともにケーブルが傷むのを防ぐことができる張力止め部を備えた超音波センサを提供する。
【解決手段】超音波を送波又は受波若しくは送受波する超音波振動子を有する超音波素子1と、超音波を通過させる開口20aを有するとともに超音波素子1を収納するボディ2及びカバー3から成る筐体4と、カバー3と一体に形成されて外部から引き回されるケーブルCをカバー3との間で挟持して張力止めする張力止め部31とを備え、張力止め部31は、一端部がカバー3と一体に形成されるとともにカバー3から所定の距離だけ離れた位置とカバー3との間でケーブルCを挟持する位置との間で撓み自在な主片31aと、主片31aの他端部に設けられて人の手の指で摘むための摘み部31cとから成る。
(もっと読む)
車両ドア開閉機構
【課題】ドア開閉駆動手段を備えたスライド式ドアに対して利用者の意思を有効に実現可能な車両ドア開閉機構を提供する。
【解決手段】ドアを開放側と閉鎖側に移動操作可能なドア開閉駆動機構と、ドアのスライド方向に延設されたハンドル3Hと、利用者の手をスライド方向に沿って移動可能に受け入れるハンドル3Hとドアパネル3Pとの間の操作空間MSと、スライド方向に沿った成分を含む角度で操作空間MS内に向けて超音波を発信する発信部31を含む操作検知手段30と、検出された手の移動方向に基づいて、ドア開閉駆動機構によるドアの移動操作方向を決定する制御装置61と、を設けた。
(もっと読む)
超音波乗客検出
輸送車両のドアの前側の乗客の存在を認識する方法及び機器は、ドアの近傍の空間の体積に超音波トランスミッタ/レシーバを向けること、超音波パルスを空の体積内に放射すること、エコーの強度を記録し統合すること、及び統合される値を標準値として保存すること、超音波パルスを体積内に繰り返し放射すること、及び、統合された値を標準値と比較すること、を含む。 (もっと読む)
移動体検出装置
【課題】異常を検出する検出回路を別途設けることなく異常検出機能をもたせることのできる移動体検出装置を提供する。
【解決手段】周波数faの送波信号を発振する第1の発振回路1aと、周波数fbの基準信号を発振する第2の発振回路1bと、超音波を送波する送波器3と、反射波を受波して受波信号を出力する受波器4と、送波信号又は基準信号の何れか一方の信号と受波信号とを混合することでドップラー信号を得る位相検波回路5と、位相検波回路5に入力される送波信号及び基準信号を切り換える周波数選択回路2と、ドップラー信号を信号処理して移動物体Oを検知して検出信号を出力する検知回路8と、移動体検出モード及び異常検出モードを有し、移動体検出モードでは送波信号を位相検波回路5に入力するとともに異常検出モードでは基準信号を位相検波回路5に入力するように周波数選択回路2を制御する制御回路9とを備えた。
(もっと読む)
超音波センサ
【課題】センサ本体が配設される部位周辺の形状を変更することなく超音波の送波方向を変更し、車内において移動物体が検知されない死角が生じるのを防ぐことのできる超音波センサを提供する。
【解決手段】超音波を送波する送波手段と、送波された超音波の反射波を受波する受波手段と、送波手段及び受波手段を収納するとともに送波手段から送波される超音波を外部に取り出す音波放射口1aを有するセンサ本体1とを備え、互いに鈍角を成すように屈曲された第1の壁面20及び第2の壁面21から成る天井2の第2の壁面21に設けられた開口21aと音波放射口1aとが連通するようにセンサ本体1が配置され、送波する超音波の波長を第1の壁面20及び第2の壁面21の屈曲部位と音波放射口1aとの間の距離よりも長くなるように設定した。
(もっと読む)
物体認識装置
【課題】探知領域内に存在する物体について、ビームの形成及びその走査を行うことなく、所定の物体を検知できるようにする。
【解決手段】反射波検出回路32a,32b,・・・32hは、反射波の先頭位置を検出したときに“1”を遅延回路44a,44b,・・・44hへ出力する。受信側のシフトレジスタ41a〜41hは遅延回路44a〜44hから出力された値を転送クロック信号に応じて順次シフトする。自動車からの反射信号を受信した場合、自動車のボディの境界を代表する複数の位置の一つの位置からの反射に対して先頭を表す“1”が、送信側のシフトレジスタ41iと受信器1a〜1hごとのシフトレジスタ41a〜41hの或る特定のレジスタ(段)に存在することになる。これらのレジスタのすべて又は殆どに“1”が存在することをand回路423で検出することによって、自動車のボディを認識する。
(もっと読む)
物体検出装置及び当該物体検出装置を用いた車両の開閉制御システム、並びに包絡線の立ち上がり検出方法
【課題】受信波の受信時刻をより正確に求め、物体の検出精度が向上された物体検出装置を提供する。
【解決手段】包絡線W5に対して、包絡線W5のピークを検出し、ピークへ向かう包絡線W5の所定の単位時間TS当たりの変化量δが増加を続ける変化量増加期間における最大の変化量δ-1を傾きとして近似直線Lを取得し、近似直線Lの電圧値が所定の基準電圧VZとなる時刻XPを反射波の受信時刻tRとして取得する。
(もっと読む)
車両用障害物監視装置
【課題】障害物の存在を運転者に報知する所望の報知範囲を容易に形成することができる車両用障害物監視装置を提供する。
【解決手段】車両用障害物監視装置は、超音波センサ2,3を通じて車両1周辺の障害物と車両1との相対距離及び相対角度から相対位置を検知する。車両用障害物監視装置は、超音波センサ2,3が障害物を検知することができる検知範囲内において障害物の存在を報知部12により運転者に報知する所望の報知範囲を設定し、検知した車両1に対する障害物の相対位置が同報知範囲内にある場合には障害物の存在を報知部12により運転者に報知する。
(もっと読む)
車両における障害物検出装置
【課題】車両に搭載する障害物検出装置の個数を減らすことができる技術を提供することを課題とする。
【解決手段】障害物検出装置30は、障害物を検出するためにビーム31を発射するビーム発射部32と、障害物によって反射された反射ビーム33を受信するビーム受信部34と、ビーム発射部32及びビーム受信部34を制御すると共にビーム受信部34で受信した情報に基づいて障害物の有無を判定する制御部35と、制御部35からの指示に基づいてビーム発射部32の発射軸36に直交する軸37廻りにビーム発射部32及びビーム受信部34を矢印(1)のように回転させる回転機構40を備えている。
【効果】ビーム発射部及びビーム受信部を回転させるようにしたので、広範囲を1個のビーム発射部及びビーム受信部でカバーすることができる。
(もっと読む)
41 - 60 / 131
[ Back to top ]