
Fターム[5J083AF05]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 自動車 (359)
Fターム[5J083AF05]の下位に属するFターム
Fターム[5J083AF05]に分類される特許
21 - 40 / 131
接近車両検出装置

【課題】走行音に基づく接近車両検出が適切な状況でのみ作動する接近車両検出装置を提供することを課題とする。
【解決手段】走行音に基づいて接近する車両を検出する接近車両検出装置1Aであって、照度情報を取得する照度情報取得手段10と、照度情報に基づいて接近車両検出を作動させるか否かを判定する判定手段21Aとを備えることを特徴とし、更に、運転者の視線情報及び姿勢情報の少なくとも一つの情報を検出する検出手段を備え、運転者の視線情報及び姿勢情報の少なくとも一つの情報に基づいて接近車両検出を作動させるか否かを判定する構成としてもよい。
(もっと読む)
接近車両検出装置及び接近車両検出方法

【課題】最大検出距離性能と耐ノイズ性能を共に向上できる接近車両検出装置及び接近車両検出方法を提供することを課題とする。
【解決手段】複数の集音器13A,14A,15A,16Aで集音された音に基づいて接近する車両を検出する接近車両検出装置であって、狭い間隔の集音器対11A(13A,14A),12A(15A,16A)を用いて音源(特に、車両の走行音)の検出を行うとともに、集音器対11A,12Aの間隔よりも広い間隔で配置された集音器対13A,16Aを用いて音源の接近を検出することを特徴とする。
(もっと読む)
車載用頭部位置検出装置、車載用表示装置及び運転支援装置
【課題】頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
(もっと読む)
移動体検出装置
【課題】部品点数の増大及び装置の大型化を抑えつつ監視空間の拡大を図り、且つ死角を少なくすることのできる移動体検出装置を提供する。
【解決手段】発振回路3と、2つの送受波器1,2と、送波信号と同周波数で互いに位相の異なる基準信号E1,E2と受波信号E0とを混合することで互いに位相の異なる1対のドップラー信号E3,E4を得る位相検波回路6A,6Bと、1対のドップラー信号E3,E4を信号処理して監視空間における物体A1の移動を検知して検出信号を出力する信号処理部8とを備え、発振回路3から出力される送波信号を反転した反転信号を出力する反転回路5を有し、一方の送受波器1には送波信号が入力されるとともに、他方の送受波器2には反転信号が入力され、各送受波器1,2を直列に接続するとともに接続された経路の中点から受波信号E0を取出す。
(もっと読む)
相関検出のための半導体デバイスおよびその形成方法
【課題】クロストークおよび他の妨害の発生を防止し、距離測定の信頼性を向上させる。
【解決手段】一実施例に従って、半導体デバイスは、受信信号を既知のパターンと相関させる。相関出力は、信頼基準レベルを形成するための基準として使用される。この信頼基準レベルおよび相関出力は、受信信号の現在の信号状態が既知のパターンを含むことを示す受信信号におけるピークを識別するために、比較される。
(もっと読む)
制御装置
【課題】残留振動を確実に収斂させることが可能な、圧電トランスデューサーの残留振動を抑制する制御装置を提供する。
【解決手段】圧電トランスデューサー(1)の残留振動を抑制する制御装置は、容量性エネルギー蓄積部品(33)と、スイッチユニット(34)を含む。制御装置は、スイッチユニット(34)により容量性エネルギー蓄積部品(33)の電圧を圧電トランスデューサー(1)に与え圧電トランスデューサー(1)の残留振動を抑制する非運転モードで作動する。容量性エネルギー蓄積部品(33)の容量値は、前記非運転モード下で、容量性エネルギー蓄積部品(33)の電圧が圧電トランスデューサー(1)の電圧に略追随できるのに十分な大きさである。
(もっと読む)
パラメトリックスピーカ装置およびこれを搭載した車両
【課題】車両接近警告音用の第1超音波と対象物までの距離測定用の第2超音波との放射に共用可能としたパラメトリックスピーカ装置を提供する。
【解決手段】複数の超音波振動子4を含む振動子ユニット2aを配備し、その振動子ユニット2aから自己復調して可聴音となる超音波を送信するパラメトリックスピーカ装置であって、振動子ユニット2aを、上記可聴音発生のための第1超音波として送信する第1タイミングと、距離測定のための第2超音波を送受信する第2タイミングとに切り替えて駆動する。
(もっと読む)
車両周辺障害物監視装置
【課題】超音波センサでの障害物の検出性能への弊害をできるだけ抑えながら検出率の向上を実現することのできる車両周辺障害物監視装置を得る。
【解決手段】画像処理部4は、車両周囲の画像情報から、車両から見た障害物の位置の測定と障害物の種類の認識を行う。超音波センサ制御部3は、反射波選択閾値パラメタや超音波発信間隔パラメタに基づいて、超音波センサ1から発信する超音波の発信タイミングの制御と、受信した反射波の強度の情報から車両周囲の障害物の検出と、車両と障害物との距離の測定とを行う。パラメタ調整部5は、画像処理部4の処理結果に基づいて超音波センサ制御部3の制御パラメタを調整する。
(もっと読む)
超音波センサ
【課題】振動漏れを防止し、振動漏れによる残響特性を改善した超音波センサを構成する。
【解決手段】超音波センサ101は、底部31bと側壁部31aとを有する有底筒状のケース31と、ケース31の内底面に貼り付けられた圧電素子32と、外部端子43及び内部端子42を保持する端子保持部材41と、内部端子に接続されて圧電素子32へ給電する配線材34,35と、を有する。ケース31の側壁部31aは、開口側に薄肉部31t、底部側に厚肉部31hをそれぞれ備えている。厚肉部31hと端子保持部材41との間に弾性部材33が設けられている。厚肉部31hに囲まれた開口領域が弾性部材33で覆われている方が好ましい。ケース31の内部には充填材36が充填されていることが好ましい。
(もっと読む)
音源方向推定装置
【課題】集音部の位置変化にかかわらず、音源の方向を高精度に推定することができる音源方向推定装置を提供する。
【解決手段】音源方向推定装置1は、音源からの音を受ける複数のマイクロホン2と、各マイクロホン2の移動速度を検出する速度センサ4と、ECU5とを備えている。ECU5は、マイクロホン2Aで受けた音波信号の位相を計算する位相計算部6Aと、移動速度に基づいて、位相計算部6Aにより位相を求めてから各マイクロホン2の位置が変化した時にマイクロホン2Aで受けた音波信号の位相を算出する遅延位相算出部7Aと、遅延位相算出部7Aにより得られた位相と位相計算部6Aにより得られた位相との差(位相差)を算出する位相差算出部8Aと、位相差算出部8Aにより得られた位相差と移動速度とを用いて、音源の方向を算出する音源方向算出部9Aとを有している。
(もっと読む)
車両方向特定装置、車両方向特定方法、及びそのプログラム
【課題】風切り音などの雑音によって車両音が埋れてしまう状況下でも、車両の存在する方向を特定する。
【解決手段】各々が、接続された検知用マイク101、102で取得された他車両音と雑音との混合音と、検知用マイク101、102の各々で取得される風雑音よりも低い音圧の風雑音が取得される位置に設置された参照用マイク103で取得された他車両音のフィルタ通過後の音信号との差が最小になるようにフィルタを生成しながら、参照用マイク103で取得された他車両音のフィルタ通過後の音信号を算出することにより、検知用マイク101、102で取得された他車両音が強調された音を抽出する複数の他車両音強調フィルタ部104、105と、複数の他車両音強調フィルタ部104、105で抽出された音の到達時間差又は音圧差から、自車両の進行方向に対する他車両が存在する方向を特定する他車両方向特定部108とを備える。
(もっと読む)
波動源位置演算方法及び波動源位置演算装置
【課題】外乱による影響を取り除き、波動源位置の演算精度を高めることができる波動源位置演算方法を提供する。
【解決手段】観測点において、波動源が放射する波動信号を検出し、当該波動源の位置を演算する波動源位置演算方法であって、波動信号を時間周波数の離散信号に変換する工程と、離散信号を用い、波動信号の振幅成分、波動信号の振幅の微分成分、または、波動信号の空間的な勾配の少なくとも一つのパラメータを含む式により、時間周波数毎に、波動源の位置を表す位置推定値を演算する位置推定値演算工程と、当該式を用いて表される評価関数に位置推定値を代入して、評価関数の値に応じて、時間周波数の帯域を制限するマスキング関数を設定するマスキング関数設定工程と、マスキング関数により時間周波数の帯域に制限をかけるマスキング工程と、位置推定値から波動源の位置を演算する波動源位置演算工程とを含む。
(もっと読む)
観測信号処理装置
【課題】観測装置と物標の間に相対速度が有る場合でも、良好なコヒーレント積分を行うことの出来る観測信号処理装置を提供する。
【解決手段】1探査当たり複数回の搬送波で変調されたパルス信号を探査信号として順次送出し、物標で反射された反射信号と、パルス信号の遅延変調パルス信号に基づいて複数の観測値を得、該得られた観測値をコヒーレント積分して積分値を外部に対して出力することの出来る装置であって、観測すべき領域に応じたコヒーレント積分回数を格納するメモリ、観測すべき領域に応じたコヒーレント積分回数分のパルス信号を探査信号として送出する手段、送出されたパルス信号の反射波を補足し観測値として蓄積する手段、概算相対速度を格納するメモリ、物標の概算相対速度に基づいて位相補正量を演算する手段、演算された位相補正量に基づいて、観測値について位相重み付きコヒーレント積分を行って外部に出力する手段から構成される。
(もっと読む)
車両用障害物監視装置
【課題】車両と障害物との距離や車両の移動方向によらず、誤検知を低減して安定して障害物を検知することができる車両用障害物監視装置を提供する。
【解決手段】車両用障害物監視装置1は、自動車などの車両に取り付けられ、車両周囲の障害物を検知して車両の操作者に警告を行う。障害物監視装置1は、全体を統括的に制御する制御部11と、SRAMからなる記憶部12と、車両の周囲に超音波を送信して物体による反射波を受信する超音波センサ13と、車両操作者に障害物の接近を通知する警告部14とを備える。制御部11は、超音波センサ13が送信波を送信してから反射波を受信するまでの時間に基づいて算出される物体までの距離に応じて判定回数を設定し、設定した判定回数以上連続して反射波を受信すると、警告部14に制御信号を出力して車両の操作者に対して警告を行う。
(もっと読む)
移動物体検出装置
【課題】監視空間を広げることで死角を少なくした移動物体検出装置を提供する。
【解決手段】送受波器2は、発振回路1から出力される送波信号E02により超音波を監視空間に送波するとともに、超音波が監視空間に存在する物体に反射して生じる反射波を受波する。この送受波器2は、送波と受波の両方を行う一つの超音波振動子20と、送波信号E02を反転させた信号により超音波振動子20を駆動するインバータからなるゲートIC22と、ゲートIC22の出力端と超音波振動子20の間に接続された直流カット用のコンデンサ23と、ゲートIC22と同じ電源で駆動され、ゲートIC22の出力を反転させた信号を発生するインバータ26と、送波信号の周波数においてコンデンサ23及び超音波振動子20の直列回路と同じインピーダンスを有し、超音波振動子20における受波信号の出力端とインバータ26の出力端との間に接続された抵抗25とを備える。
(もっと読む)
移動物体検出装置
【課題】監視空間を広げることで死角を少なくした移動物体検出装置を提供する。
【解決手段】第1及び第2のミキサ信号発生回路4,5は、送波信号発生回路3から出力される送波信号E02と同周波数で、互いに位相が異なる基準信号Ea,Ebを出力する。位相検波回路6は、送受波器2から出力される受波信号Einを基準信号Ea,Ebと混合することで、基準信号Ea,Ebとの位相差に応じた振幅を有し且つ互いに位相の異なる一対のドップラー信号E1,E2を出力する。送波信号発生回路3と第1及び第2のミキサ信号発生回路4,5は、送波信号E02により送受波器2に駆動電源が供給される期間と、位相検波回路6により基準信号Ea,Ebと受波信号Einとが混合されて受波信号Einが出力される期間とが時間軸上で重ならないように、送波信号E02と基準信号Ea,Ebとの位相をずらして生成する。
(もっと読む)
移動物体検出装置
【課題】監視空間を広げることで死角を少なくした移動物体検出装置を提供する。
【解決手段】送受波器2は、超音波振動子20と、発振回路1から出力される送波信号E02を反転させた信号により超音波振動子20を駆動するインバータ22とを備え、超音波振動子20は、インバータ22からの送波信号により超音波を監視空間にするとともに、超音波が監視空間に存在する物体に反射して生じる反射波を受波して受波信号を出力する。差動回路3は、超音波振動子20に入力される信号と、超音波振動子20から出力される信号との差分を出力する。送波信号にはインバータ22の電源ノイズが重畳され、電源ノイズの重畳した送波信号に受波信号が加わった信号が超音波振動子20から出力される場合でも、差動回路3により電源ノイズが重畳された送波信号を打ち消して、受波信号のみが出力される。
(もっと読む)
自動車用侵入検知装置
【課題】昆虫などの小型の移動物体を不審者として誤検出してしまうことを容易に防止する。
【解決手段】不審者が車内に侵入する際は窓ガラスを破壊することが多く、窓ガラスが破壊されていないときは送波器1から送波される超音波が窓ガラスに遮られて車外に到達しないため、人以外の小型の移動物体(例えば、昆虫など)が車内に居ても車外に設置されている受波器4A〜4Dで反射波を受波しないから誤検出することがない。一方、窓ガラスを破壊して不審者が車内に侵入すれば、車内に設置された送波器1から送波される超音波が破壊された窓ガラスに遮られることなく車外に到達するため、車内に侵入した不審者に反射した反射波を破壊された窓ガラスに対向して設置されている受波器4A〜4Dで受波して当該不審者を検知することができる。
(もっと読む)
自動車用侵入検知装置
【課題】昆虫などの小型の移動物体を不審者として誤検出してしまうことを容易に防止する。
【解決手段】不審者が車内に侵入する際は窓ガラスを破壊することが多く、窓ガラスが破壊されていないときは送波器1A〜1Dから送波される超音波が窓ガラスに遮られて車内に到達しないため、人以外の小型の移動物体(例えば、昆虫など)が車内に居ても受波器4で反射波を受波しないから誤検出することがない。一方、窓ガラスを破壊して不審者が車内に侵入すれば、破壊された窓ガラスに対向して設置されている送波器1A〜1Dから送波される超音波が窓ガラスに遮られずに車内に到達するため、車内に侵入した不審者に反射した反射波を受波器4で受波して当該不審者を検知することができる。
(もっと読む)
車両の周囲状況を表す方法
本発明は、車両(5)の周囲状況を表す方法に関しており、ここでは、車両(5)の周囲にある対象体をセンサによって検出し、それぞれ検出した対象体を2つの座標点(11,13)と、各座標点(11,13)に割り当てられた位置曖昧さ(15)とによって表し、これらの座標点(11,13)および位置曖昧さ(15)をインタフェースにデータとして記憶し、このインタフェースには車両(5)の走行アシストシステムがアクセス可能である。本発明はさらに車両(5)と対象体との衝突確率を求める方法に関しており、ここではまず上記の車両(5)の周囲を表す方法を使用して車両(5)の周囲を表し、つぎのステップでは上記の位置曖昧さ(15)を考慮して、この車両(5)が走行するチューブ状走行パス(23)を求め、続いて対象体とチューブ状走行パス(23)との重なり度を求め、ひいては衝突確率を求める。 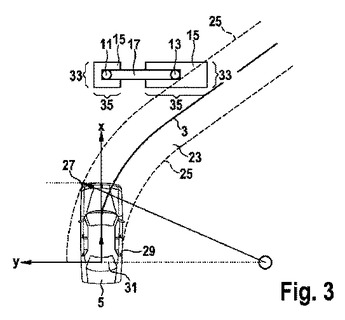 (もっと読む)
(もっと読む)
21 - 40 / 131
[ Back to top ]