
Fターム[5J083BE11]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | レベル検出 (66)
Fターム[5J083BE11]の下位に属するFターム
ピークレベル検出 (23)
零交差(ゼロクロス) (5)
Fターム[5J083BE11]に分類される特許
1 - 20 / 38
位置出力装置、位置出力システムおよびプログラム
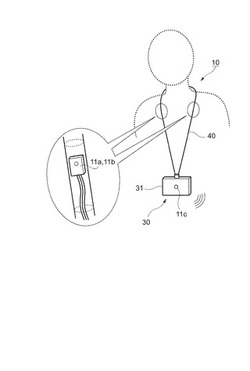
【課題】音声を発生する話者の三次元位置を、より良好に把握することができる位置出力装置等を提供する。
【解決手段】装着者の口からの距離が互いに異なる2つと水平方向の距離が離れた2つを含み話者の音声を取得する少なくとも3個以上設けられるマイクロフォン11a,11b,11cと、装着者の口からの距離が互いに異なる2つのマイクロフォン11a、マイクロフォン11cで取得される音声の音圧差に基づいて、話者が装着者か他者かを識別する識別手段と、識別手段によって話者が他者と識別された場合に、話者の三次元位置を導出するための数値計算の初期値を選択する初期値選択手段と、初期値選択手段により選択された初期値を用いた数値計算により話者の三次元位置を導出する位置導出手段と、を備えることを特徴とする端末装置10。
(もっと読む)
水中探知装置、水中探知方法、および水中探知プログラム

【課題】正確に魚種を判別可能な新たな魚種判別機能を備える水中探知装置を提供する。
【解決手段】水中探知装置1の演算処理部14は、取得したエコー信号から単体魚を検出する(S101)。演算処理部14は、検出した単体魚毎に入射角を検出する(S102)。演算処理部14は、入射角を検出した単体魚の反射強度TSを算出する(S103)。演算処理部14は、算出した反射強度TSの入射角特性と、魚種毎に設定されたテンプレート特性曲線とを比較する。演算処理部14は、算出した反射強度TSの入射角特性が最も類似するテンプレート特性曲線に対応する魚種を選択する(S104)。
(もっと読む)
障害物検出装置
【課題】従来の障害物の位置を求める開口合成法は距離画像の画像処理で濃度勾配を求め勾配方向から障害物の大まかな傾き角度を推定できるが距離画像はボケが大きいため、求めた傾き角度には大きな誤差が含まれる。
【解決手段】複数個の超音波センサの中の1個から信号発信部で生成された超音波信号を発信し、障害物から反射され、複数個の超音波センサが得た超音波信号を信号受信部で受信・記憶し、この受信超音波信号から障害物位置検出部で障害物位置を特定し、各超音波センサの受信信号中から障害物からの反射波を特定して、超音波センサ間での反射波の信号強度の比率を求め、障害物と超音波センサと障害物の角度をパラメータとして、各超音波センサで得られる障害物からの反射波の信号強度比が格納された信号強度比角度算出テーブルを参照して障害物の角度を求める信号強度比角度推定部を備える。
(もっと読む)
移動体検出装置
【課題】部品点数を増大させることなく窓ガラスに加わる衝撃の有無の検出と移動体の有無の検出との両方を実行することのできる移動体検出装置を提供する。
【解決手段】送波信号を発振する発振回路12と、超音波を送波する送波器10と、超音波が移動体A1に反射して生じる反射波、又は窓ガラスに衝撃が加えられた際に生じる超音波を受波して受波信号E0を出力する受波器11と、送波信号と同じ周波数の基準信号E1,E2と受波信号E0との周波数差に基づいてドップラー信号E3,E4を出力する位相検波回路14,15と、ドップラー信号に基づいて移動体A1の有無を判定する移動体判定部2と、ドップラー信号の振幅成分を演算し、当該振幅成分と予め設定された判定値とを比較することで衝撃の有無を判定する衝撃判定部3とを備え、各位相検波回路14,15に入力される基準信号E1,E2は、互いに位相が異なる。
(もっと読む)
物体検出支援システム、制御方法、及びプログラム
【課題】送信器から発せられる検出波による物体の検出を支援すること。
【解決手段】設定部110と、送信レベル取得部120と、設定部110に保持されている送信器510及び受信器の各位置情報に基づいて、伝播損失を受信器から見た方位と距離の関数で表す伝播損失関数として算出する伝播損失関数推定部130と、設定部110に保持されている物体情報の物体について、外部のデータベース600から当該物体のターゲットストレングスを抽出するターゲットストレングス取得部140と、送信レベル取得部120が取得した送信レベル情報と、伝播損失関数推定部130が算出した伝播損失関数と、ターゲットストレングス取得部140が抽出したターゲットストレングスとに基づいて、信号レベルを受信器からの方位と距離の関数で表す検出信号レベル関数を求め、外部の表示手段700に表示させる検出信号レベル関数推定部150とを備える。
(もっと読む)
侵入検知システム、距離測定装置、距離測定方法および距離測定プログラム
【課題】空間特徴量を用いて人間の動作を検知する侵入検知システムにおいて、簡易な構成で侵入者の位置を測定する。
【解決手段】侵入検知システム201において、距離測定装置101は、音波を送信するための測定用送信機11と、測定用送信機11の近傍に配置されるかまたは測定用送信機11と一体化され、測定用送信機11から送信された音波を受信するための測定用受信機12と、侵入検知装置151によって人間の動作が検知される前および検知された後の各々における、測定用送信機11から直接または反射して測定用受信機12に到着した音波である複数の受信波の到着タイミングを示す時間情報、および各受信波の振幅を示す振幅情報を取得し、取得した各時間情報および各振幅情報に基づいて、距離測定装置101と所定エリアにおける人間との距離を算出するための制御部13とを含む。
(もっと読む)
水中航走体誘導システム、個別航走体水中走行制御方法、及びその制御プログラム
【課題】本発明は、予め設定された目標物に向けて、水中航走行体を有効に音響ホーミングさせるようにした水中航走体誘導システムを提供することにある。
【解決手段】周波数の異なる二つの誘導超音波信号S1,S2に順次案内されて目標物Mに向けて水中航走する一の個別航走体2と、第1,第2の誘導超音波信号S1,S2を発信する主航走体1とを設ける。一方の誘導信号S1は周波数の低い無指向性の超音波が使用され、他方の誘導信号S2は目標物Mに向けて周波数の高い超音波が発信される。そして、前述した一の個別航走体2は、一方の誘導信号S1を受信し且つ受信音圧が高くなる方向に航走する第1の水中航走実行機能と、この誘導信号S1の受信音圧のレベルが基準値以上となった場合に目標物Mからの反射である他方の誘導信号S2に向けてその航走方向を切換えてその方向に水中航走を実行する第2の水中航走実行機能とを備えている。
(もっと読む)
音波を用いた探知方法、非接触音響探知システム、そのシステムで用いるプログラム、およびそのプログラムを記録した記録媒体
【課題】探知対象物の位置を正確に把握することができる探知方法およびその探知方法を行うことができる非接触音響探知システムの提供。
【解決手段】探知対象物を内部に含む被照射体の表面に音波を照射し、その表面の複数の測定個所において振動速度を測定し、得られた振動速度分布図から前記探知対象物の位置を特定する音波を用いた探知方法であって、音波発信源から音波を照射し、前記被照射体の表面を振動させる工程と、前記被照射体の表面のn箇所(n≧2)の測定個所を、各々、P1、P2・・・Px・・Pn(xは1〜nの整数)とし、それらの測定箇所の各々において、照射した音波の周波数がωである場合の前記被照射体の表面の振動速度を測定し、Pxにおける前記振動速度をEx(ω)とする工程と、特定の情報処理を行う工程とを備える探知方法。
(もっと読む)
距離測定装置
【課題】本発明は、電源をオンにしてから直ちに、正しい測定値が得られる距離測定装置を提供する。
【解決手段】距離測定装置10は、対象物11までの距離Lを測定し、測定値を電圧V1として出力する超音波センサ20と、超音波センサ20の1次遅れを補正するための電圧V2を出力する補正回路30と、超音波センサ20からの電圧V1及び補正回路30からの電圧V2が供給され、補正値Cを算出して、合成電圧を出力するマイコン40とを備える。
(もっと読む)
音源位置特定装置および音源位置特定方法
【課題】同種の音源(周波数域が同じ音源)が複数存在する場合であっても、個別にその位置を特定することが可能な音源位置特定装置および音源位置算出方法を提供することを目的とする。
【解決手段】空間内の異なる位置にそれぞれ設置され、空間内の複数の音源からの音が混合した混合信号を同時に取得する複数のマイク110と、複数の混合信号から独立成分分析を用いて、個々の音源からの音を示す単一音源信号を求める信号分離部114と、単一音源信号をもとに、個々の音源から個々のマイクが取得したと推定される音を示す個別信号を算出する個別信号算出部118と、音源ごとに個々のマイクの個別信号同士を比較して、マイクごとの個別信号の強度の比率を取得する比率取得部120と、比率と複数のマイクの設置位置とから、個々の音源の位置を算出する音源位置算出部122とを備えることを特徴とする。
(もっと読む)
直間比推定装置、音源距離測定装置、雑音除去装置、各装置の方法と、装置プログラム
【課題】1個のマイクロホンアレーで音源との間の距離を推定する。
【解決手段】この発明の音源距離測定装置は、複数のマイクロホンから成る1個のマイクロホンアレーと、複数の周波数領域変換部と、直間比推定部と、直間比と距離との関係を記録した距離−直間比データベースと、距離判定部と、を具備する。複数の周波数領域変換部は、複数のマイクロホンで受音された受音信号がそれぞれ入力され、受音信号を周波数領域の信号に変換する。直間比推定部は、複数の周波数領域変換部の出力する周波数領域の信号を入力として受音信号の直間比を推定する。距離判定部は、直間比を入力として距離−直間比データベースを参照してその直間比と対応する音源距離推定値を推定する。
(もっと読む)
人工物検出システム、該システムに用いられる人工物検出方法及び人工物検出制御プログラム
【課題】広範囲の海底や水底に存在する人工物を、埋没している場合も含めて一度に効率良く検出することが可能な人工物検出システムを提供する。
【解決手段】海底又は水底Bに配置されている人工地震発生手段(たとえば、人工地震の震源11)により、人工地震が発生し、海中又は水中に配置されている振動波検出手段(たとえば、振動センサ12)により、人工地震により発生する音波が検出されると共に、同音波よりも速い伝搬速度で地震波qwを伝搬する海底又は水底Bから海中又は水中に放射される振動波が検出される。そして、人工物存在判定手段(たとえば、データ処理装置13)により、振動センサ12で検出される振動波のレベルが相対的に高くなるとき、同振動波の到来方位が検出され、同到来方位の海底又は水底Bに人工物HWが存在することが判定される。
(もっと読む)
測定装置、測定方法および水中距離測定システム
【課題】送信装置と受信装置との距離を精度良く測定する。
【解決手段】受信装置200は、水中において信号を複数の異なる周波数で超音波により送信する送信装置100との距離を測定する測定装置であり、送信装置100から送信された超音波から周波数に応じた複数の信号をそれぞれ抽出し、抽出した複数の信号の強度の差分を示す差分値、送信装置100との距離が既知である場合の複数の信号の強度の差分を示す第1の定数、および信号が送信された複数の周波数において距離に応じた信号の強度変化の差分を示す第2の定数に基づいて、送信装置100からの距離を取得する。
(もっと読む)
超音波センサの車体への取付け角度計測方法及びその計測システム
【課題】超音波センサのセンサ軸の車体への取付け基準方向に対する取付け角度を定量的にかつ簡便に計測する超音波センサの車体への取付角度計測方法を提供する。
【解決手段】 本発明の超音波センサの車体への取付角度計測方法は、
擬似路面部材2を用いて超音波センサ5の取付け基準方向SRに対する上下方向の傾きを計測するステップと、
対称性の計測対象4A、4Bを用いて超音波センサ5の取付け基準方向SRに対する左右方向の傾きを計測するステップとからなる。
(もっと読む)
画像ソナー用解析システム、画像ソナー用解析方法、画像ソナー用解析プログラム
【課題】ソナー画像から目標物を正確に識別する。
【解決手段】水上または水面下に位置する目標物の検出用ソナーが、送出した音信号の進行方向に沿って前記反射音レベルの分布解析を行うことにより得られた、前記進行方向の距離に対する反射音レベルの下がった割合が、予め設定された値より大きい領域をエッジ領域として検出するエッジ検出手段と、エッジ領域を端部として含み、且つ反射音レベルが2次元画像データに基づき算出された平均残響レベルより低い領域をシャドウ領域として検出する音圧レベル解析手段とを備えた。
(もっと読む)
障害物検出装置
【課題】外来ノイズとセンサ送受信の混信による誤報防止を図りながら、検出エリアの変動を極力抑制する障害物検出装置を提供する
【解決手段】マイクロフォン21及び回路部23を持つセンサ5は、基準周波数モードまたは外来ノイズを避けるための前記基準周波数モードとは異なる周波数で超音波を送波するシフト周波数モードのうち、いずれかに周波数調整回路32で切替えて、超音波を送波するとともに、マイク駆動回路33での超音波の音圧またはゲイン調整回路36での受信感度を、基準周波数モードの送信時からシフト周波数モードでの送信時とで変更する。これにより、外来ノイズで誤動作し難く、かつ検知エリアの変更を抑制することが出来る。
(もっと読む)
三次元受波装置およびこれを備えた三次元測位装置ならびに三次元測位方法
【課題】迅速に三次元座標を測位することを目的とする。
【解決手段】音波信号を受信する2つのマイクロホンからなる受波器対を3対備え、マイクロホンの第一の対を構成する2つのマイクロホン21,22が、x軸上に座標原点2を挟んで対称に配置され、マイクロホンの第二の対を構成する2つのマイクロホン23,24が、座標原点2を通りかつx軸に直交するy軸上に座標原点2を挟んで対称に配置され、マイクロホンの第三の対を構成する2つのマイクロホン25,26が、座標原点2を通りかつx軸およびy軸に直交するz軸上に、座標原点2を挟んで対称に配置されていることを特徴とする三次元受波装置3を用いる。
(もっと読む)
水底下物体の探査類別方法及び装置
【課題】散乱波のレベルが高く類別に適した周波数を簡易に選定でき、水底下物体を精度よく類別可能な水底下物体の探査類別方法及び装置を提供する。
【解決手段】周回中に送波器3から所定の帯域で周波数を変化させた音波を送波すると共に、受波器4でその散乱波を受波して、水底下物体に対する方位角度を縦軸、周波数を横軸とした周波数散乱レベルの分布を作成し、作成した周波数散乱レベルの分布を基に、散乱波の強度が高く類別に適した周波数を選定すると共に、選定した周波数における散乱波の方向レベルパターンを抽出し、その散乱波の方向レベルパターンを予め蓄積したデータベースと照合することで、水底下物体の類別を行う。
(もっと読む)
動線計測システム
【課題】 受波信号の最初の立ち上りが小さく、その後徐々に大きくなる性質を有する圧電式の超音波発生素子を使用した場合でも、受波信号の誤検出を可及的に防止する。
【解決手段】 アレイセンサ2の基板1上の左右方向とこれに直交する上下方向に第1、第2及び第3センサS1,S2a,S3aを夫々直線状に配列し、かつ、音源から発生させる超音波の波長をλとするとき、第2センサS2aは第1センサS1からλ/2以下の間隔Lで配置するとともに、第3センサS3aは第1センサS1からn×λ(nは自然数)の間隔で配置する。制御部3は、第2センサS2aと第1センサS1の受波時間の差をn×λ/L倍して第3センサS3aの受波時間の予測値を求める予測手段と、第3センサS3aにおいて前記予測値から所定の時間範囲内に検出された受波信号のみを正しい信号として採用する確認手段を実行する。
(もっと読む)
物体検出装置
【課題】複数の反射波の受信時刻の相対的な関係を精度良く求め、検出対象の物体の位置を精度良く検出することのできる物体検出装置を提供する。
【解決手段】送信した超音波に対する物体からの反射波に基づいて物体の位置を検出する物体検出装置であって、それぞれ異なる位置に配置された複数の受信器に達した超音波を、それぞれ複数の振動波形により構成される受信信号Fとして受信する複数の受信部と、1つの受信部に受信された受信信号Fを基準受信信号FRとし、複数の振動波形VFの内の少なくとも1つの波形を基準波形VRとして特定する基準波形特定部と、他の受信部に受信された受信信号F2、F3から、基準波形VRの特徴と最も近似する特徴を有する振動波形VFを対象波形VTとして検出する対象波形検出部と、基準波形VR及び対象波形VTから特定される受信時刻tRに基づいて物体の位置を演算する演算部とを有する。
(もっと読む)
1 - 20 / 38
[ Back to top ]