
Fターム[5J084AD05]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 映像、画像 (198)
Fターム[5J084AD05]に分類される特許
161 - 180 / 198
光伝搬時間の測定方法
【課題】 比較的有利な構成要素と、より低い周波数の増幅器により動作できる光伝搬時間の測定方法。
【解決手段】 カメラ等のための光伝搬時間測定方法(装置)では、クロック制御部(11)によりクロッキングされる第1の光信号が少なくとも1つの送信器(12)から少なくとも1つの光区間(14)へ、反射性対象物(O)を介して少なくとも1つの受信器(13)に送信され、前記受信器は、前記対象物(O)の接近、滞留(停止)および/または離隔により変化した前記第1の光信号を検出する。受信器では、第1の光信号の結果である、光区間からの受信信号が検出され、伝搬時間を検出するために、クロック制御部(11)によりクロッキングされた第2の信号と比較器(15)でクロック毎に比較される。この第2の信号は光区間(14)なしで生じる信号である。そして前記比較器(15)の出力端に比較値を形成するために、この比較器は、送信信号および/または第2の信号の振幅値を制御するために使用され、前記受信信号と前記第2の信号が少なくとも前記比較器の入力端で実質的に同じ大きさであるようにする。平行して、クロック変化の際に発生し、光伝搬時間に相応する、光区間(14)からの前記受信信号と前記第2の信号との間のクロック変化信号(TW)がクロックに従って検出される。ここで前記光区間(14)からの前記受信信号と前記第2の信号は前記比較器(15)の入力端において実質的に同じ大きさに制御される。前記受信信号と前記第2の信号との間のクロック変化信号(TW)をその振幅に従い、別の比較器(16)で比較することによって差値(S16)が検出される。この差値(S16)が最小に、有利にはゼロになるまで、位相シフタ(17)によって受信信号と第2の信号の位相の位相遅延が変化される。差値が最小であるときに発生した位相シフタの遅延は光伝搬時間の検出に使用される。これによって光伝搬時間の測定方法が得られる。  (もっと読む)
(もっと読む)
航空機上での乱気流測定ならびに空港および風力発電基地のための方法およびライダーシステム

本発明は、ライダーシステムを使用して、特に航空機上で使用して、乱気流を測定する方法に関し、該方法では予め定めた波長の拡張パルスレーザービーム(12)を空間領域に向けて放射し、その空間領域からの後方散乱光を受信する。レーザーパルス(L)を放射後の第1の時点t1と第2の時点t2において後方散乱光の断面内の強度分布を測定し、両方の強度分布の比較によって、時点t1およびt2で画定される測定フィールド内の乱気流を決定する。スペックルパターン画像はカメラ(21、22)を利用して記録する。評価ユニット(30)は、乱気流を視覚化し、モニター(35)上に表示するために相互相関を実施する。 (もっと読む)
海上における対象物の捜索方法及びシステム並びに対象物の捜索方法を実行する記録媒体

【課題】捜索物及び捜索領域の状況に応じて捜索を確実にすることができる海上捜索システム及び装置並びにこの捜索を実行するプログラムを提供する。
【解決手段】海上に浮遊又は漂流又は走行している対象物を捜索する捜索方法であって、浮遊又は漂流又は走行している対象物の当該海域の海象条件を入力する入力装置103と、前記入力された海象条件及び対象物の大きさに応じた探知率変化を、予め記憶装置105に記憶されたデータベース106から読み出す読出し装置101と、前記読み出された探知率変化から対象物の認識確率を算出する算出装置102と、前記算出装置で算出された捜索モードを出力する出力装置104と、を備え、海象条件により捜索条件を策定する。
(もっと読む)
防犯センサ
【課題】
距離情報と大きさ情報とを同時に取得できて、検知精度を向上させると共に情報処理を容易に行うことができ、かつセンサの小型化が図れてコスト的に有利な防犯センサを提供する。
【解決手段】
警戒エリア内に存在する物体までの距離と該物体の大きさとを同時に測定可能な距離画像センサと、該距離画像センサで得られた距離画像の距離情報と大きさ情報とに基づき、物体が人体より大きいか人体より小さいかを区別して侵入者か否かを判定する判定手段と、を備える。距離画像センサは、投光手段から投光された光の反射光を受光手段で受光することによって得られた距離画像の全画素について距離測定を行い、また、背景光を除去可能なCMOS撮像素子によって形成される。
(もっと読む)
監視装置
【課題】 小型の装置により、鮮明な監視画面を得ることのできる監視装置を提供することを目的とする。
【解決手段】 レーザレーダ制御部2内の画像処理装置25が、ICCDカメラヘッド123から出力された画像信号を所定期間に渡って蓄積し、蓄積した複数の画像信号を重畳して出力することにより、出力レベルの高い信号を出力することが可能となる。これにより、小型で出力レベルの低いレーザ発振器111を用いた場合であっても、鮮明な監視画像を表示装置4に表示させることが可能となる。
(もっと読む)
監視装置
【課題】 良好な画質の監視画像を得ることのできる監視装置を提供する。
【解決手段】 監視画角の情報がレーザレーダ制御部2内のズームレンズ制御部28に入力されると、ズームレンズ制御部28は、この監視画角に基づいて、受光部12の位置を調節する。一方、この監視画角の情報は、送光レンズ制御部27へも入力される。送光レンズ制御部27は、この監視画角に適した照射領域にレーザ光が照射されるような位置に送光レンズ112を移動させる。これにより、送光レンズ112の位置を監視画角に応じて適切な位置に移動させることが可能となり、適切なレーザ照射領域及び監視画角にて、監視対象の情報を取得することが可能となる。
(もっと読む)
車両撮像カメラ
【課題】 車両をより確実に撮像すること。
【解決手段】 所定の車線6に進入する車両7の映像を撮像するカメラ5と、レーザが発射されてからレーザが車両7の表面で反射した反射光が受光されるまでの飛行時間に基づいて車両7の立体形状を示す距離画像を間欠的に生成するフラッシュレーザレーダ4と、その距離画像に基づいてカメラ5を制御する制御装置11とを備えていることが好ましい。
(もっと読む)
携帯端末
【課題】 プロジェクタの利用を不必要に妨げることなく、プロジェクタが出力する光に対してアイセーフを確保することのできる携帯端末を提供する。
【解決手段】 プロジェクタ2は、画像を外部のスクリーンに投射する。距離測定部4は、プロジェクタ2の光源と人物の目までの距離を測定する。光源制御部6は、測定した距離に基づいて、プロジェクタ2の光源の出力を制御する。
(もっと読む)
追尾照準装置
【課題】本発明は、3軸ジンバル構造を採用して天頂ロックを確実に回避することを前提として、装置の大型化を抑制するとともに、光軸調整の簡素化を図って調整誤差の減少化を得られ、追尾照準精度の向上化を図れる追尾照準装置を提供する。
【解決手段】被取付け体に取付け固定される装置ベース1と、この装置ベースに回転自在に支持されるジンバル部2との組み合せからなり、内部に、レーザ発生器7と、照明光学系8と、画像センサ14および、3軸ジンバル構造のクーデ光学系10を収容し、移動する目標物を追尾して画像を取り込み、かつレーザ光の照準を合わせて目標物を照射する追尾照準装置において、装置ベースに、レーザ発生器と、画像センサを配置するとともに、画像センサの光軸と、レーザ発生器から発振されるレーザ光の光軸とを、クーデ光学系における1軸の調整で一致させる光軸調整機構20を具備する。
(もっと読む)
カメラ
【課題】構造が簡単なカメラを提供すること。
【解決手段】特定の輻射パターンを持つ投射光を被写体に照射するストロボ505、506を有し、ストロボ505、506の被写体反射光を撮像し、撮像した画像の光強度を用いて奥行き画像を得る、形状計測用または被写体抽出用のカメラであって、ストロボ505、506の発光なしの状態にて動画像を撮像し記録メディアに録画できるビデオカメラ533を兼ねており、ストロボ505、506が発光した時に撮像した画像データにインデックス信号を付加しておき、インデックス信号が付加された特定の画像のみを用いて奥行き画像を算出する。
(もっと読む)
車両用物体認識装置
【課題】路上にある道路標識等の看板を確実に識別して先行車両等の車線上の物体との距離測定が看板に影響されずに正しく行うことのできる車両用物体認識装置を提供する。
【解決手段】車両用物体認識装置は、前方を走行する先行車両や障害物等の物体との間の距離L1や方位を測定する相対位置測定装置7と、前方の画像を撮像して画像認識を行い、撮像画像に基づいて距離L2を測定する撮像装置5とを備える。
先行車両6が看板3の下方を通過する際に検知ビーム2を看板3を照射しない検知ビーム2′まで下げることにより、先行車両6までの測定距離に誤差が生じないようにする。
(もっと読む)
3次元画像情報取得装置
【課題】レーザ光を測定対象物に照射し測定対象物からの反射光を受光することにより測定対象物の3次元画像情報を取得する装置であって、従来のシステムとは異なる方法を用いて高速に3次元画像を取得する。
【解決手段】測定対象物で反射したレーザ光を受光する複数の受光面を備え、各受光面で受光したレーザ光の情報をそれぞれ電気信号に変換して出力する光電変換器と、複数の部分領域毎に、選択されたマイクロミラーの反射面を所定の向きに制御してON状態にし、このON状態のマイクロミラーで反射した測定対象物からのレーザ光の反射光を、それぞれ異なる受光面へと導くマイクロミラーアレイ空間変調素子と、各電気信号毎の位相ずれ情報と、各部分領域それぞれの前記ON状態のマイクロミラーの位置情報とを用いて測定対象物の3次元位置情報を求めるデータ処理部とを有する3次元画像情報取得装置を提供する。
(もっと読む)
3次元画像情報取得システム
【課題】 測定対象物の表面反射率や表面形状によらない、高精度な測定対象物の3次元画像情報を、高速に取得可能な3次元画像情報取得システムを提供する。
【解決手段】 時間変調したレーザ光を測定対象物に向けてそれぞれ同時に照射する、それぞれ異なる位置に配置された複数のレーザ光出射部と、受光した複数のレーザ光の反射光に応じた電気信号をそれぞれ出力する、それぞれ異なる位置に配置された複数の光電変換器と、ON状態のマイクロミラーで反射した複数のレーザ光を、各光電変換器の受光面に導く空間変調素子と、各光電変換器から出力された電気信号それぞれについて、各光電変換器の受光面が受光した複数のレーザ光それぞれに応じた電気信号成分を識別する電気信号成分識別部と、各電器信号成分毎に測定対象物の3次元位置情報を求める位置情報算出部とを有する3次元画像情報取得システムを提供する。
(もっと読む)
監視装置
【課題】 遠方に存在する船舶や障害などの物体を速やかに自動検知し、かつ、検知した物体の画像を表示すること。
【解決手段】 レーダ1により、物体の存在が検知された場合には、送光部21から発せられるレーザ光がその物体に照射されるように、送光部21及び受光部22の仰角及び回転角が制御装置3により動かされる。これにより、送光部21から発せられたレーザ光は、物体に反射され、この反射光が受光部22により撮像される。そして、受光部22により取得された画像が、レーザレーダ制御部24の画像処理装置により処理され、処理後の画像信号が制御装置3を介して表示装置4に供給される。これにより、表示装置4に受光部22により取得された画像が表示されることにより、その物体の形状などを確認することが可能となる。
(もっと読む)
撮像装置
【課題】 受光素子の出力から積分器で積分するまでの総合的なS/N比を改善できる撮像装置を提供する。
【解決手段】 閾演算回路208は、フォトダイオード207の出力を受け付けて、出力の受け付け開始タイミングで第1の信号を出力し、出力が所定の閾値を越えたタイミングで第2の信号を出力する。積分手段は、第1の信号に応じて第1の積分処理を開始し、第2の信号に応じて第1の積分処理を終了して第1の積分結果を出力し、出力した第1の積分結果に対して第1の積分処理と極性の異なる第2の積分処理を所定の値となるまで行う。カウンタ215は、積分手段が第2の積分処理を開始してから終了するまでの時間を計数する。
(もっと読む)
三次元センサを用いるエレベータエリアの監視
本発明は、三次元画像情報を取得するための3D半導体センサ79を用いて、エレベータエリアを監視するための装置に関する。半導体センサ79は、監視されるべきエレベータエリアが、光源によって照光される領域に配置されるようにして取り付けられる光源と、反射光を受光するようにして取り付けられるセンサ群と、電気的信号を画像情報に変換するための処理チップとを備えている。装置には、三次元画像情報を供給するために半導体センサ79に接続されている処理ユニット80も設けられている。処理ユニット80は、監視されるべきエレベータエリアの状態をあらわす状態情報を得るために、画像情報を処理する。 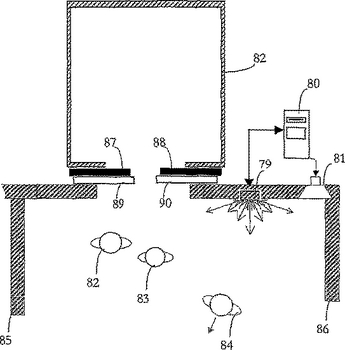 (もっと読む)
(もっと読む)
レーザ光出射器およびレーザレーダ装置
【課題】コンパクトでありながら、かつ動作不良もない、レーザ光出射器を提供する。
【解決手段】変調されたレーザ光を出射するレーザ出射器において、一方の基板面の一部の領域を除く表面全体が導電体膜で覆われた1つの基板の、前記一部の領域にドライバ回路を、他方の基板面にレーザダイオードを設け、金属筐体によって一方の基板面のドライバ回路を覆うことで、この金属筐体と前記導電体膜によって前記ドライバ回路を静電遮蔽する。
(もっと読む)
3Dカメラ用誤差補償方法
一つのシーン(場面)内の距離値dを4タップ3Dイメージセンサの出力から、該イメージセンサの画素に所定の積分時間間隔Tintg中に累積される電荷に基づいて決定する方法が開示される。本発明によれば、所定の積分時間間隔Tintgは多数の部分積分時間間隔(T1、T2、T3、T4)に分割され、距離値dが上記部分積分時間間隔(T1、T2、T3、T4)の各々の端における4タップの個々のタップ応答に基づいて計算される。 (もっと読む)
流体流動計測システムおよび風力発電装置
【目的】 実地形についての広範囲な風況の把握可能な流体流動計測システム、およびそれを用いた風力発電装置を提供する。
【構成】 レーザ光を流動場へ照射させるレーザ発振装置と、 流動場に照射されたレーザ光が捉える粒子を連続撮影して撮影画像データを取得する画像撮影手段と、 その画像撮影手段による撮影のタイミングをレーザ光の照射に同期させる制御手段と、 撮影画像データを風況解析用に処理する画像処理手段とを備える。前記レーザ光学系は、当該流動場内における風力発電装置を挟んで異なる複数の計測領域を照らすレーザ光を照射し、前記画像撮影手段は、その複数のレーザ光に対する撮影画像データを取得する。前記画像処理手段は、取得した複数の撮影画像データを用いて流動場の風況解析に供する画像処理を行う。
(もっと読む)
立体視装置およびそれを備えた立体画像表示システム
【課題】 超小型、かつ低消費電力、かつリアルタイム撮像が可能な立体視装置およびそれを備えた立体画像表示システムを提供する。
【解決手段】 この立体視装置では、超音波発生器4は、LFSR11からのPN符号に従って振幅変調された超音波を生成して対象物6に照射する。イメージセンサ14は、複数行複数列に配置され、各々が対象物6からの反射波を受け、受けた反射波を電気信号に変換する複数の単位キャパシタを含む。相関器15は、複数の単位キャパシタの各々によって生成された電気信号の位相とLFSR12からのPN符号の位相とを比較し、比較結果に応じて相関値DATAを出力する。これにより、対象物の三次元的な立体画像をリアルタイムに得ることができる。また、立体視装置内部に記憶回路やプロセッサが不要であるため、超小型で低消費電力の立体視装置が実現できる。
(もっと読む)
161 - 180 / 198
[ Back to top ]