
Fターム[5J084AD05]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 映像、画像 (198)
Fターム[5J084AD05]に分類される特許
61 - 80 / 198
物体検出装置および情報取得装置
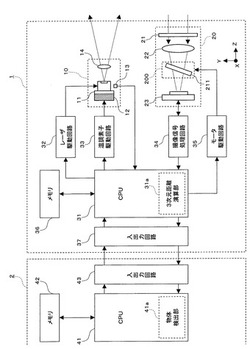
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長800nm程度の光を出射するレーザ光源11と、レーザ光源11の温度を調節する温調素子12と、レーザ光源11の温度を検出する温度センサ13と、目標領域から反射された反射光を透過させるためのフィルタ211と、フィルタ211を透過した反射光を受光して信号を出力するCMOSイメージセンサ23と、反射光に対するフィルタ211の傾き角を変化させるフィルタ駆動部200とを備える。CPU31は、温調素子12により設定可能な前記レーザ光源11の温度範囲内で、CMOSイメージセンサ23の受光量が最大となるよう温調素子12およびフィルタ駆動部200を制御する。
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、レーザスキャナ(10)の環境内で物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、多数の測定点(X)について、物体(O)までの距離を求める制御評価ユニット(22)とを含む装置において、回転鏡(16)は、ハイブリッド構造として構成されたロータ(61)の一部である。 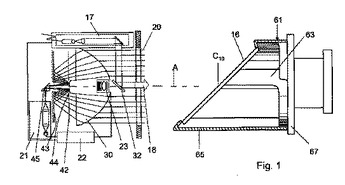 (もっと読む)
(もっと読む)
環境を光学的に走査し測定する装置
レーザスキャナ(10)として構成された、環境を光学的に走査し測定する装置であって、回転鏡(16)によって発光光線(18)を放出する発光素子(17)と、回転鏡(16)および光軸(A)を有する受光レンズ(30)を通過した後にレーザスキャナ(10)の環境内の物体(O)から反射されるかあるいはその他の形で散乱した受光光線(20)を受け取る受光素子(21)と、レーザスキャナ(10)の環境のカラー画像を撮影するカラーカメラ(23)と、多数の測定点(X)について、物体(O)までの距離を求め、この距離をカラー画像と連係させる制御評価ユニット(22)とを含む装置において、カラーカメラ(23)は、受光レンズ(30)の光軸(A)上に配置される。 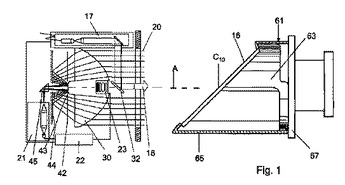 (もっと読む)
(もっと読む)
小型マルチスペクトル走査システム
本発明は、主ミラー(1)および副ミラー(2)を備える小型マルチスペクトル走査システムに関連し、これらのミラーは互いに向かい合い、反対方向に同じ角速度で回転されるように適合され、それらの回転軸に対して傾けられる。主ミラーは凹形であり、副ミラーは主ミラーよりも小さく、両ミラーの回転軸は位置合わせされる。この構成により、システムは先行技術のデバイスよりも小型になり、システムが動作周波数に依存することが回避される。 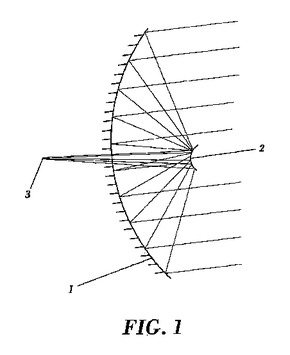 (もっと読む)
(もっと読む)
物標検出装置および物標検出方法

【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
動線認識システム
【課題】監視領域が広い対象に対して有効な動線認識システムを提供する。
【解決手段】監視領域内における移動体の位置検出をマルチレーザスキャナ方式で行う。そして、このマルチレーザスキャナ方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに監視領域移動体情報としてレーザ動線データベース27に記録する。一方、監視領域内の一部である特定領域内における移動体の位置を、マルチレーザスキャナ方式よりも位置検出の精度が高いカメラ画像方式で行う。そして、このカメラ画像方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに特定領域移動体情報としてカメラ動線データベース28に記録する。
(もっと読む)
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
三次元形状測定装置
【課題】被測定物の奥行き方向の空間分解能を低下させずに測定範囲を拡大できる三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化するチャープ光パルスを生成する第1パルス光源30と、所定の波長の単波長光パルスを生成する第2パルス光源32と、ワーク24から反射されたチャープ光パルス110a、110bの第1反射光像を取得する反射光像取得部78と、前記第2反射光像の二次元情報を参照し、ワーク24から反射された単波長光パルス112の第2反射光像を取得する反射光像取得部78と、前記第1反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得する三次元情報取得部80と、前記チャープ光パルスをワーク24に向けて照射するタイミングと、前記単波長光パルスをワーク24に向けて照射するタイミングとを調整するタイミング制御部70とを有する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
位置検出装置
【課題】位置検出に伴う計算量を削減し、処理の高速化及び装置の低コスト化を図る。
【解決手段】一対の画像からなるステレオ画像を所定の時間間隔で取得する画像取得部11と、前記ステレオ画像のうちの一方を基準画像、他方を比較画像として、該基準画像内の検出対象領域にマッチングする前記比較画像内のマッチング領域を探索する探索部12と、前記基準画像内の検出対象領域の位置及び探索部12により探索された比較画像内のマッチング領域の位置から求まる視差に基づいて、当該ステレオ画像内に存在する物体の撮影地点からの距離を算出する距離算出部13と、距離算出部13により算出された距離に応じて、当該ステレオ画像の次に取得されるステレオ画像についての探索部12による前記比較画像内の探索範囲を変更する探索範囲変更部14とを備える位置検出装置である。
(もっと読む)
モデル生成装置、モデル生成方法、モデル生成プログラム、点群画像生成方法および点群画像生成プログラム
【課題】道路を高解像度で表す三次元モデルを生成できるようにすることを目的とする。
【解決手段】画像処理部110はカメラ画像を選択し、所定の処理範囲を処理範囲画像191として抽出し、処理範囲画像191のレンズ収差を補正する。画素点群生成部120はカメラ画像と三次元点群198とに基づいて処理範囲画像191の各画素に対応する三次元座標値および色情報を示す画素点群192を生成する。画素補間点群生成部130は画素点群192に基づいて画素点が低密度である部分を補間する画素補間点群193を生成する。道路三次元モデル生成部140は画素点群192と画素補間点群193とを含んだデータを道路三次元モデル194として生成する。
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 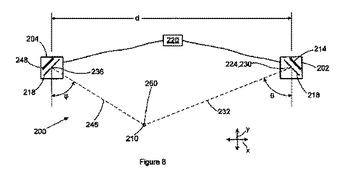 (もっと読む)
(もっと読む)
位置確認のために三次元位置と二次元強度のマッピングを組み合わせるための方法と装置
マッピング方法は、第1のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために該第1のモバイルユニットを使用する工程を含む。該特徴の三次元位置はマッピング中に検知される。三次元マップは、特徴の三次元位置と二次元の特徴のマップとの間の関連性を含むように作成される。三次元マップは第1のモバイルユニットから第2のモバイルユニットに提供される。第2のモバイルユニットは、第2のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために使用される。第2のモバイルユニットによってマッピングされた二次元の特徴の三次元位置は、第2のモバイルユニット内で、三次元マップを使用することにより測定される。 (もっと読む)
目標検出装置及び目標検出方法
【課題】低熱源目標を容易にかつ確実に検出可能な目標検出装置を提供する。
【解決手段】赤外線カメラ12の視野内に、光学装置11から赤外線レーザビームを放射してカメラ視野範囲を走査していき、低熱源目標Tに当たって反射する赤外線レーザビームの反射光を赤外線カメラ12に入射して目標情報検出器14により低熱源目標Tを検出するようにしている。
(もっと読む)
距離画像撮影装置
【課題】正確な距離画像の撮影を可能とする距離画像撮影装置を提供する。
【解決手段】撮像空間内に向けて光波を照射し、当該光波を照射された当該撮像空間内の物体からの反射波の伝搬遅延時間に基づいて物体までの距離を示す距離画像を撮像する距離画像撮影装置であって、異なる波長帯の複数の光波を他の物体に向けて発光する光波照射手段と、複数の光波の反射波を波長帯毎に受光し、各反射波の受光量を検出する受光手段と、複数の光波各々の伝搬遅延時間を算出する遅延時間算出手段と、受光した反射波の受光量の大きさを各々比較して、当該受光量の大小を判定する受光量判定手段と、少なくとも、受光手段における受光量が最も大きい波長帯の光波の伝搬遅延時間に基づいて物体までの距離を算出する距離算出手段と、距離算出手段により算出された物体までの距離に基づいて距離画像を生成する距離画像生成手段とを備える、距離画像撮影装置。
(もっと読む)
音源推定方法
【課題】車室内などの、室内モードの影響が大きい場所であっても、音源を精度よく推定することのできる音源推定方法を提供する。
【解決手段】複数のマイクロフォンM1〜M5とカメラ12とを一体化した音・映像採取ユニット10を一定の速度でゆっくりと移動させて、異音発生の指摘があった場所Pを中心に音と映像の情報を採取し、各マイクロフォンM1〜M5で採取した音の音圧信号を用いて音源方向(θ,φ)とを周波数毎に算出した後、音源方向のデータ(θkj,φkj)と音源の方向の推定に用いたときに撮影された映像の画像データGkとを合成して、推定された音源の方向を示す図形32が描画された音源位置推定画面33kを作成し、この音源位置推定画面33k中の上記図形32が集中的に描画されている箇所を上記異音の発生源の方向として、異音の発生源を特定するようにした。
(もっと読む)
物体検出装置
【課題】物体の向きに適応した物体の輪郭検出を行うことにより物体の検出精度を高められる物体検出装置を提供すること。
【解決手段】物体の検出を行う物体検出装置であって、LIDAR2により物体の検出点pを検出し、物体の向きをカメラ3によって検出し、物体の向きに応じて輪郭検出用のテンプレートを選択し、そのテンプレートをLIDAR2により検出された検出点pの点列Pに当てはめて物体の輪郭を検出する。これにより、物体の向きに適応した形状のテンプレートを用いて物体の輪郭を検出することができるため、物体の輪郭を適切に検出して物体の検出精度を高めることができる。
(もっと読む)
2D電子光学的画像データに対する3D点群データの登録
二次元画像データセット及び点群データを有する三次元画像の登録のための方法及びシステムについて開示している。本発明の方法は、シーンにおいて地表面を有する点群データの一部を除去するように、三次元画像データを有する点群データの三次元ボリュームをクロッピングするステップと、三次元ボリュームをm個のサブボリュームに分割するステップとにより始まる。次に、その方法は、二次元画像データをエッジ強調するステップを有する。次に、サブボリュームを各々適格化するために、フィルタ処理された濃淡画像を生成し、エッジ強調された前記二次元画像データ及び前記フィルタ処理された濃淡画像に基づいて、二次元相関表面を演算し、前記二次元相関表面のピークを求め、前記二次元画像における前記ピークの対応する位置を決定し、対応点セットを規定し、そして点セットリストにおける前記対応点セットを記憶するステップを有する。最終的には、点セットリストに含まれる複数の相関点セット間の誤差を最小化する変換が決定される。  (もっと読む)
(もっと読む)
場面の内容に基づく点群データの視覚化のための方法及びシステム
色と空間データを結びつけるシステム及び方法が提供される。前記システム及び方法において、場面タグが、場所についての放射測定画像800の部分804のために選択される。さらに、前記放射測定画像データの前記第一の部分に関連する前記空間データ200の部分が選択される。前記場面タグに基づいて、前記空間データの前記部分の色空間関数500、600が選択される。前記色空間関数は、前記空間データの高度座標の関数として、色相、彩度及び輝度(HSIを定義する。)前記空間データの前記部分は、前記空間データの前記部分に基づく前記色空間関数から選択されるHSI値を用いて表示される。前記システム及び方法において、場面タグはそれぞれ異なる区分に関連する。各色空間関数は、関連する区分の前記HSI値における所定の異なるバリエーションを表す。  (もっと読む)
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
61 - 80 / 198
[ Back to top ]