
Fターム[5J084AD05]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 映像、画像 (198)
Fターム[5J084AD05]に分類される特許
181 - 198 / 198
光子検知子モジュールと像映装置。
【課題】
レンジ解像度を達成するのに必要な回路速度と密度、レーザーエコーにおけるピコ秒の飛走相違に基づいた小さなターゲット表面変動を明示するのに必要な感度とを具えたレーダー像映システムを提供する。
【解決手段】
ターゲットからの光子反射を発生する光子源と、光子反射に反応して検知子アレイ出力信号を生成する検知子アレイと、検知子アレイ出力信号を受信する積層処理モジュールとを有してなり、処理モジュールが少なくとも2個の積層を有し、各積層が受信検知子アレイ出力信号処理のための少なくとも1個の集積回路チップを有している。
(もっと読む)
光送受信装置および光送受信方法

【課題】高い指向性能と、光送受信装置全体として小型化・軽量を図る。
【解決手段】光送受信装置20は、アジマス方向回動軸受30と共に赤外レーザ光b1を送出する基台22と、この基台22のアジマス方向回動軸受30に回動自在に支持される光送受信装置本体21とを具備し、光送受信装置本体21側からターゲット向けて照射する赤外レーザ光b1の反射赤外レーザ光b2を受けてターゲットの測距を行う機器群45と、機器群45をエレベーション方向に回動自在に支持するエレベーション方向回動軸受41と、エレベーション方向回動軸受41を支持する支持枠体24と、アジマス方向回動軸受30とエレベーション方向回動軸受41には、それぞれ設けられる透孔部30a,41aと、各透孔部30a,41a間を導光接続可能に設けられる空間導光路qとを備え、基台22側から送出される赤外レーザ光b1を、空間導光路qを介して上記機器群45側へ導光する。
(もっと読む)
器具の位置の非接触型決定を実行する方法及びシステム
本発明の実施形態は器具(410、540、630、720)の位置を非接触的に決定する方法或いは決定するシステムに関する。一実施形態においては、非接触型測定システムが移動機械に連結された器具の位置を決定する。移動機械の地理的位置を測定し(320)、器具(330)の地理的位置が、移動機械(330)の地理的位置及び器具の移動機械(310)に対する位置に基づいて決定する。  (もっと読む)
(もっと読む)
画像処理装置
【課題】対象空間での光量変化の影響を受けずに対象物を抽出できる画像処理装置を提供する。
【解決手段】発光源2は対象空間に光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物で反射され光検出素子1で受光される反射光との対応関係によって対象物Obまでの距離を求め、対象空間の各方向に対応する画素値が距離値である距離画像を生成する。微分処理部5は、距離画像から基準平面に対する勾配方向を表す勾配方向値を画素値とする勾配方向画像を生成する。さらに、対象物判定部6は、勾配方向値を用いることにより対象物と背景の境界付近を抽出する。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
発熱物体の位置検出装置
【課題】発熱物体の位置検出の高精度化を実現することができるうえに、装置全体の簡略化及び小型化を図ることができる発熱物体の位置検出装置を提供する。
【解決手段】光送信部2と、発熱物体Aが発する赤外線IR及び発熱物体Aで反射した反射光LRを集光する集光レンズ3と、赤外線IR及び反射光LRを分光する分光手段4と、分光手段4を経た赤外線IRを検出する赤外線センサ5と、分光手段4を経た反射光LRを検出する光受信部6と、赤外線センサ5及び光受信部6からのデータに基づいて発熱物体Aまでの距離を測定する信号処理手段7を備えた位置検出装置とし、赤外線画像で捕捉した発熱物体Aの方位及び距離を検出する。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定
対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
飛翔体追尾方法及び飛翔体追尾装置
【課題】 自機に向かって飛来するミサイルなどの飛翔体を発射後の早い時期に探知し、継続的に追尾することが可能な飛翔体追尾方法及び飛翔体追尾装置を得る。
【解決手段】 紫外線センサを設け、自機に向かって飛来するミサイルなどの飛翔体を、この飛翔体のプルームが発する紫外線を検出することにより、パッシブな手法でかつ早期に初期探知する。また、初期探知した飛翔体の赤外線画像を撮像して飛翔体のテール部を抽出後、このテール部から飛翔体の進行方向にレーザビーム光を照射することによって飛翔体のシーカ搭載位置を捕捉し、これを照準点としてレーザビーム光による飛翔体の追尾を継続する。
(もっと読む)
環境認識システムおよび移動機構
【課題】
測距ターゲットが移動しているときや測距システムが移動しているときでも、正確に測距ターゲットを認識する。
【解決手段】
環境認識システム1は、変調されたビーム102を用いて相対的に移動する物体2を認識する。ビーム発射手段12は、ビームを発射する。ビーム走査手段13は、ビームを走査する。物体からの反射ビームをビーム受信手段が16検出する。ビーム受信手段が受信した信号に基づいて距離画像を距離計測手段17が取得する。距離計測手段が取得した複数の画像を比較して距離画像に含まれる物体の歪みを歪み除去手段が除去する。
(もっと読む)
赤外線投光器、赤外線撮像装置、並びに車両
【課題】 レーザレーダを備えた車両等において、安価且つ低消費電力で赤外線映像を取得する。
【解決手段】 レーザ光を出射するレーザー発振器21と、レーザスキャン範囲Aでレーザ光を走査させる首振りアクチュエータ23と、物体で反射したレーザ光を受光する首振りアクチュエータ23と、レーザー発振器21から出射されたレーザ光を発散させて、レーザスキャン範囲A及び近赤外投光範囲Cを含む範囲に近赤外線を投光する近赤外投光用レンズ11と、物体で反射した近赤外線光を受光して赤外線映像を撮像する近赤外線カメラ4とを備え、ECU3により、物体を検出する場合には、レーザ光を走査させて受光したレーザ光に基づいて物体情報を算出し、赤外線映像を取得する場合には、近赤外線を投光させて赤外線映像を撮像させる。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 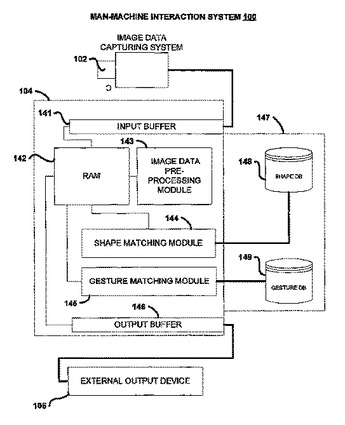 (もっと読む)
(もっと読む)
単一チップの赤、緑、青、距離(RGB−Z)センサー
RGB−Zセンサーは単一のICチップ上に実施可能である。ホットミラーなどのビームスプリッタが、対象物から入射する第一及び第二のスペクトルバンド光エネルギーを受信し、好ましくはRGBであるイメージ成分及び好ましくはNIRZである成分に分離する。RGBイメージとZ成分は、それぞれイメージデータとZデータを出力するRGBピクセル検出器及びNIRピクセル検出器のアレイ領域によってそれぞれ検出される。これらの領域のピクセルサイズ及びアレイ解像度は同一である必要はなく、またこれら両方のアレイ領域を共通のICチップ上に形成しても良い。対象物の認識を容易にするために、イメージデータを用いたディスプレイはZデータによって補助できる。その結果得られる構成は、ビームスプリットを行なうことによる光学的効率性と単一のICチップに実施することによる簡素性とを組み合わせたものとなる。この単一チップの赤、緑、青、距離(RGB−Z)センサーの使用方法も開示されている。  (もっと読む)
(もっと読む)
監視装置
【課題】 広範囲に渡る監視を自動的に行うことにより操作員の負担を軽減し、更に、探知物体の正確な情報を効率的に得る監視装置を提供することを目的とする。
【解決手段】 パルスレーザ光を発するレーザ装置2と、所定の監視範囲に存在する物体により反射されたパルスレーザ光の反射光を撮像するICCDカメラ3と、所定の監視範囲を設定し、設定した所定の監視範囲に応じてICCDカメラ3のシャッタの開閉タイミングを制御する制御部5とを備え、制御部5は、監視中において、所定の監視範囲を広域監視範囲に設定し、監視中において物体が確認された場合は、所定の監視範囲を狭域監視範囲に設定するとともに、狭域監視範囲を長手方向へ移動させる。
(もっと読む)
3次元距離測定用の光電子センサおよびデバイス
本発明は変調された光子束(50)を復調する光電子センサ、および少なくとも1つのそのような光電子センサを備えた特に3次元距離測定用の測定デバイスに関する。本発明の光電子センサは、半導体領域(10)内に組み込まれ、例えば、半導体領域内で拡散され、半導体領域(10)と逆にドープされた少なくとも2つの収集領域(20、22)を備える。前記収集領域(20、22)を用いて変調された光子電流(50)の進入によって生じる少数担体が収集かつタップされる。さらに少なくとも2つの制御領域(32、34)が半導体領域(10)内に組み込まれ、前記制御領域は制御領域(32、34)に印加することのできる制御電圧に従ってドリフト領域を生成する。前記制御領域(32、34)は半導体領域(10)と同様にドープされている。
 (もっと読む)
(もっと読む)
距離情報入力装置
【課題】本発明は、クロストークの低減された高精度な距離情報を取得可能にする距離情報入力装置を提供する。
【解決手段】本発明の一態様によると、輝度変調光源によって輝度変調された光が照射された前記対象物からの反射光を受光し、光電変換を行うと共に、前記輝度変調光源と同期して感度変調可能な受光素子を備えた距離情報入力装置において、前記受光素子は、光電変換部と、二つの電荷蓄積部と、二つの電荷振り分けゲートと、二つの電荷検出部と、二つの電荷転送部とを有し、前記受光素子のリセット動作と前記電荷蓄積部に蓄積された電荷を読み出す読み出し動作との間に、前記電荷振り分けゲートをオフして前記電荷蓄積部のポテンシャルを上げることによって飽和電荷量以上の余剰電子を排出する動作を少なくとも一回行なうことを特徴とする距離情報入力装置が提供される。
(もっと読む)
撮像方法及び撮像装置
【課題】 小形のパルス光源であっても撮像対象からの反射光量を十分確保して、その画像の良好な再生に供し得る撮像方法を提供する。
【解決手段】 撮像対象2に向けてパルス光を照射するレーザ装置1と、入射光量に比例して蓄積された電荷をフレーム周期で読みだすことにより映像信号を得るとともにシャッタ3aを有するカメラ3とを利用し、レーザ装置1からの照射光を、1フレーム区間で複数回断続させてパルス光として照射するとともに、前記シャッタ3aを、前記パルス光の周期に合わせて開閉させることにより多重露光を可能にした。
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
車両用表示装置
【課題】 視認性の良くない走行環境において前方に存在する障害物を、ドライバが容易に認識させる。
【解決手段】 表示制御装置は、ライトスイッチがオン状態のときには前方視界が良くないと判断できるので、前方障害物センサによる障害物の検出結果と、予め設定された赤外線カメラと当該前方障害物センサとの車両上の配置関係に関する情報とに基づいて、その障害物に相当する部分画像を、当該赤外線カメラによって撮影された赤外画像の中から抽出し、抽出した部分画像を、地図画像情報に基づいて生成した現在位置前方の立体的な地図画像の対応位置に重ね合わせた状態で、表示器に表示する(S1-S2)。
(もっと読む)
181 - 198 / 198
[ Back to top ]