
Fターム[5J084AD05]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 映像、画像 (198)
Fターム[5J084AD05]に分類される特許
21 - 40 / 198
パノラマ画像作成方法及び3次元レーザスキャナ
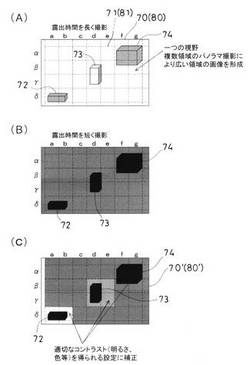
【課題】測定範囲に対応するパノラマ画像中のコントラストが最適となる様にするパノラマ画像作成方法及びパノラマ画像中のコントラストが最適となる画像データを取得する。
【解決手段】測定対象物72,73,74を含む様に測定範囲70を設定し、測定範囲を所要分割して複数の区画71を設定し、各区画毎に撮影した画像を合成してパノラマ画像80を作成するパノラマ画像作成方法に於いて、各区画毎に複数の撮像条件で撮影し、少なくとも測定対象物については、最適な撮像条件で撮影された画像が用いられてパノラマ画像が合成される。
(もっと読む)
距離センサ及び距離画像センサ

【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が光入射面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と裏面1BKとの間に位置すると共に、裏面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
距離測定装置及びカメラ
【課題】距離を正確かつ安全に測定することができる距離測定装置及びカメラを提供する。
【解決手段】オートフォーカス機能によって取得された画像データの画像処理を行って顔を検出し、顔以外の部分にレーザ光を照射して人Mまでの距離を測定する。正確な距離情報が得られたフォーカスエリアFAと他のフォーカスエリアFAとの差分からすべてのフォーカスエリアFAにある物体までの距離を算出し、ファインダ枠50内の全部の物体までの距離情報を取得する。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
物体検出装置及びこれを備えた車載機器制御装置
【課題】互いに異なる波長帯の光を発する少なくとも2種類の検出対象物を検出する際に外乱光が存在しても、高精度な検出を可能とする。
【解決手段】撮像装置が撮像した画像データから、対向車両のヘッドランプと先行車両のテールランプがそれぞれ発する各検出波長帯(赤色と白色)についての分光情報を取得するとともに、同画像データから当該分光情報に対応した検出波長帯についての偏光情報を取得し、取得した分光情報によりヘッドランプとテールランプを識別し、偏光情報を用いてヘッドランプ及びテールランプからの直接光と雨路面からの照り返し光とを識別する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、第1方向で受光領域を挟んで対向して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置され、異なる位相の電荷転送信号が与えられる。第1及び第2ゲート電極TX1,TX2は、対応する第1及び第2ゲート電極TX1,TX2と受光領域との間に位置する第1電極部分TX1a,TX2aと、受光領域と重複し且つ第2方向での幅が第1電極部分TX1a,TX2aよりも狭い第2電極部分TX1b,TX2bと、を有する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第3ゲート電極TX31,TX32は、長辺に沿って配置された第1及び第2ゲート電極TX1,TX2の間に空間的に離間してそれぞれ配置される。第3ゲート電極TX31,TX32は、第3半導体領域FD3と受光領域との間に位置する第1電極部分TX3aと、受光領域と重複し且つ第2方向での幅が第1電極部分よりも狭い第2電極部分TX3bと、を有する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図ることが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】電荷発生領域は、矩形形状を呈し且つ第1の方向D1に伸びる第1の領域R1内に配置される。信号電荷収集領域は、第1の領域R1の辺R1a,R1b側に設けられ且つ第1の方向D1での位置が互いにずれている複数の第2の領域R2内に配置される。第2の領域R2は、第1の領域R1と重複する部分の縁が第1の方向R1と交差する方向に伸びる2辺R2a,R2bを含む。信号電荷収集領域は、その縁が辺R2a,R2bに沿って伸びる辺FD1a,FD1b,FD2a,FD2bを含む。転送電極は、信号電荷収集領域の辺FD1a,FD1b,FD2a,FD2bに沿って伸びる部分を有する。電荷発生領域は、その縁が第2の領域R2の2辺R2a,R2bに沿って伸びる2辺を含む。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】フォトゲート電極PGは、平面形状が互いに対向する第1及び第2長辺LS1,LS2と互いに対向する第1及び第2短辺SS1,SS2とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、第1及び第2長辺LS1,LS2の対向方向でフォトゲート電極PGを挟んで対向して配置されている。第3半導体領域SR1は、第1及び第2短辺SS1,SS2の対向方向でフォトゲート電極PGを挟んで対向して配置されている。第3半導体領域SR1は、第1及び第2短辺SS1,SS2側でのポテンシャルをフォトゲート電極PGの直下の領域における第1及び第2半導体領域FD1,FD2の間に位置する領域でのポテンシャルよりも高めている。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第3ゲート電極TX3は、長辺に沿って配置された第1及び第2ゲート電極TX1,TX2の間に空間的に離間してそれぞれ配置される。ポテンシャル調整電極ELは、受光領域における第3ゲート電極TX3の間に位置する領域に重複し、第3ゲート電極TX3に与えられる電荷転送信号と同じ位相であり且つ当該電荷転送信号より電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】フォトゲート電極PGは、平面形状が第1方向で互いに対向する第1及び第2長辺LS1,LS2と第2方向で互いに対向する第1及び第2短辺SS1,SS2とを有する長方形状である。複数の半導体領域FD1,FD2は、第1方向でフォトゲート電極PGを挟んで対向し且つ第2方向に沿って互いに空間的に離間して配置されている。フォトゲート電極PGの直下の領域は、第1方向で対向する半導体領域FD1,FD2の間に位置する第1領域CG1と、第1領域CG1に第2方向で挟まれる第2領域CG2と、を含む。第3半導体領域SR1は、第2領域CG2に配置されている。第3半導体領域SR1は、第2領域CG2側でのポテンシャルを第1領域CG1でのポテンシャルよりも高めている。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図ることが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】電荷発生領域は、矩形形状を呈し且つ第1の方向D1に伸びる第1の領域R1内に配置されている。信号電荷収集領域は、第1の方向D1に直交する方向で互い対向するように第1の領域R1の第1の方向D1に伸びる2辺R1a,R1b側にそれぞれ設けられ且つ第1の領域R1と重複する複数の第2の領域R2内に少なくとも一部が含まれるように配置されている。転送電極は、第2の領域R2内における電荷発生領域と信号電荷収集領域との間に位置すると共に、第2の領域R2の縁に沿って伸びる部分を有している。電荷発生領域は、その縁が第2の領域R2の縁に沿って伸びている。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】目標に対して精度よく光波を照射し得る。
【解決手段】実施形態によれば、照射部にて移動目標に対し光波を照射し、光波の反射光を撮像部にて受光して撮像視野内の移動目標に関する画像情報を得て、この画像情報に基づいて駆動部にて光波の照射方向と移動目標からの光波の反射方向とを一致させるべく照射部及び撮像部を駆動して移動目標を追跡する目標追跡装置において、照射部から光波の照射方向に対応する照射部の姿勢情報を取得する取得手段と、この取得手段で得られた姿勢情報と、撮像部で得られる画像情報とに基づいて光波の照射方向と撮像部の指向方向との間の偏向角誤差を算出する演算手段と、この演算手段で求められた偏向角誤差に基づいて、光波の照射方向と撮像部の指向方向との間の偏向角を補正すべく駆動部を制御する制御手段とを備えた目標追跡装置を提供する。
(もっと読む)
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
目標追跡装置及び目標判定方法
【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
飛行時間撮像装置
【課題】飛行時間測定を使用した深度図を生成するための改良された解法に関し、特に飛行時間撮像装置およびより精度良い飛行時間撮像方法を提供する。
【解決手段】飛行時間撮像装置6のセンサ5の画素アレイ内の伝播遅延を考慮した、深度修正プロファイルは測定された深度図に応用される。前記深度修正プロファイルは、2つのn次元多項式の重ね合わせである。
(もっと読む)
撮像デバイス及び撮像装置
【課題】光源から投射された光を利用して被写体までの距離を取得する距離画像センサ、及び光源から投射された光により生体を検出する生体検出センサの機能を、RGB等の画像及び近赤外光画像を取得する1つの撮像デバイスを用いて実現する。
【解決手段】本発明の撮像デバイスは、光学フィルタ32、可視光センサ(2つの層38と39で形成される可視光センサ)と近赤外光センサ(2つの層36と37で形成される非可視光センサ)を光の進入方向に配置し、可視光画像と近赤外光画像を分離して出力する出力部40を有する。そのため、各画像間の画像ズレがなく、かつ解像度の欠損もなく、距離測定や生体検出の機能を高解像度撮像が可能な1つの撮像デバイスを用いて実現することが可能となる。
(もっと読む)
21 - 40 / 198
[ Back to top ]