
Fターム[5J084BA38]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 受光系に関するもの (1,335) | 複数の受光素子を有するもの (515)
Fターム[5J084BA38]の下位に属するFターム
1次元配列 (69)
2次元配列 (307)
各々投光と対をなしているもの (5)
Fターム[5J084BA38]に分類される特許
121 - 134 / 134
複数のレーザを有する相対的動きセンサ
オブジェクト(15)及びセンサの動きを互いに対して相対的に測定するための相対的動きセンサであって、相対的動きセンサは、それぞれの測定ビームを生成し、オブジェクトを照明するための複数のレーザ(3,5)と、レーザ共振器における光波及びそれぞれのレーザ共振器に再入射する反射された測定ビーム放射の干渉によりもたらされる各々のレーザ共振器の動作における変化を測定するための複数の関連フォトダイオード(4,6)とを有する。複数のレーザ(3,5)は、レーザの副集合(即ち、1つ又はそれ以上)のみが何れかの一時点で動作され、残りのレーザは休止状態であるように、時間多重化されるように動作される。これは、ピーク電力損失を低減し、他のレーザの共振器に入射する一のレーザからの測定ビーム放射によりもたらされる間違った干渉を回避することができる。  (もっと読む)
(もっと読む)
干渉法絶対距離計の位相ノイズ補正
本発明は、干渉法による絶対距離測定の方法に関する。方法は、少なくとも1つの測定する目標物への周波数変調した電磁放射線、及び、ヘテロダインの混合を備えた放射線の受信で行なう。放射線は、基準の干渉長さを介して平行に案内される。目標物で散乱され戻る放射線の第1のデジタル化した干渉図形および基準長さで案内される放射線の第2のデジタル化した干渉図形が、受信器で受信される。第2干渉図形の位相曲線データから、仮想干渉図形又はその位相曲線を合成し、第1干渉図形の位相曲線データを仮想干渉図形の位相曲線データと比較して距離測定を行う。  (もっと読む)
(もっと読む)
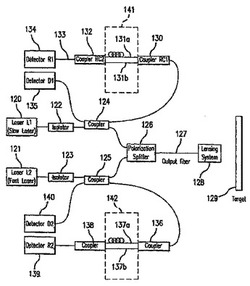
逆チャープFMCWコヒーレントレーザレーダのためのコンパクト光ファイバジオメトリ
【課題】
大きな精度、迅速な測定時間、狭い空間へのアクセス、柔軟性及び信頼性を可能にする実用的な光精密測定システムを提供する。
【解決手段】
本開示は、環境の影響を受けない二重チャープコヒーレントレーザレーダのバージョンを構築するために偏光ダイプレックス方式で偏波保持(PM)光ファイバ構成要素(127)を使用するための、任意の目標(129)までの距離を測定するための方法、及び多様な構成ジオメトリを含む、非接触精密光学素子(12)を提示する。
(もっと読む)
測距装置

【課題】計算過程において大きな値を用いることなく位相差を求めることにより処理負荷の軽減を可能とした測距装置を提供する。
【解決手段】発光源1は強度変調光を対象空間に投光し、光検出素子2は対象空間からの光を受光する。光検出素子2の受光出力は強度変調光における位相が90度異なるタイミングでサンプリング部3によりサンプリングされ4個の検出値が得られる。演算処理部6は、発光源1から投光した強度変調光と光検出素子2で受光した強度変調光との位相差に相当する値を求める。演算処理部6は、強度変調光の1周期を複数に区切った区間を設定するとともに4個の検出値の関係により位相差の存在する区間を判別する区間判別部7と、区間ごとに設定された区間関数で線形になる関数を近似し区間判別部7で判別した区間に応じた区間関数に検出値を代入して位相差に相当する値を求める演算部8とを備える。
(もっと読む)
画素センサ回路デバイス及びその方法
本明細書において、距離測定デバイス及び光センサ回路が開示されている。LED(140)が物体(190)を照射するように光源からパルスを発生させること、かつ物体により反射された光の位相と光源の本来の位相との間の位相差を測定することによって、物体までの距離が測定され得る。位相差を測定するために、CMOS光センサ又は光センサアレイ(120)が、反射光を受信し、異なる期間の間に生成された電荷を異なる蓄積ノード、即ち、画素セル(202,204)に蓄積するのに使用され得る。異なる蓄積ノードに蓄積された電荷量の間の差を、物体を照射する本来の光と物体による反射光との間の位相差を決定するために使用することが可能である。次いで、この位相差を物体までの距離の決定に使用することが可能である。  (もっと読む)
(もっと読む)
風速・風向測定システム
【課題】 測定範囲内における風速・風向を、効率よく、容易かつ簡単に測定することができる風速・風向測定システムを提供すること。
【解決手段】 レーザ光を測定箇所に出射する出射部と、その測定箇所で散乱された戻レーザ光を受光する受光部と、この出射部と受光部を駆動制御する制御部30と、を備えて、その制御部のCPU31は、測定箇所を細かく変動させて近傍3箇所における風速測定を行うことにより、その測定箇所における風速・風向を測定するとともに、その測定箇所を3次元的に変化させる。
(もっと読む)
風速測定システムおよび風速測定方法
【課題】 ドップラーシフトにより変化したレーザ光の周波数を簡易に導くことを実現して、測定箇所における風速や風向を容易かつ簡単に測定可能な風速測定システムを提供すること。
【解決手段】 出射レーザ光L1を出射するレーザ光生成器11と、出射レーザ光L1の戻レーザ光L2を分光するハーフミラー24と、ハーフミラーを透過する第1分光戻レーザ光L21の光強度を測定する第1光強度測定器27と、ハーフミラーにより反射された第2分光戻レーザ光L22をその周波数に応じて減衰させる光フィルタ26と、光フィルタにより減衰された第2分光戻レーザ光L22の光強度を測定する第2光強度測定器28と、光フィルタによる光強度の減衰量から戻レーザ光の周波数を算出して出射レーザ光の周波数と共に代入することにより測定箇所における風速・風向を算出する制御部と、を備える。
(もっと読む)
光子検知子モジュールと像映装置。
【課題】
レンジ解像度を達成するのに必要な回路速度と密度、レーザーエコーにおけるピコ秒の飛走相違に基づいた小さなターゲット表面変動を明示するのに必要な感度とを具えたレーダー像映システムを提供する。
【解決手段】
ターゲットからの光子反射を発生する光子源と、光子反射に反応して検知子アレイ出力信号を生成する検知子アレイと、検知子アレイ出力信号を受信する積層処理モジュールとを有してなり、処理モジュールが少なくとも2個の積層を有し、各積層が受信検知子アレイ出力信号処理のための少なくとも1個の集積回路チップを有している。
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 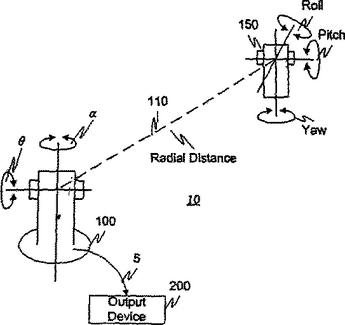 (もっと読む)
(もっと読む)
光波妨害装置
【課題】 変調妨害の効果を損なうことなく、目標に照射される妨害レーザ光の強度を高めた光波妨害装置を得る。
【解決手段】 共通の変調信号によって変調された2つのレーザ光を同一の目標である飛翔体に照射することによって、照射された飛翔体側でこれら2つのレーザ光の変調信号を同位相で合成させる。また、飛翔体との距離情報に基づいて、共通の変調信号によって変調された2つのパルス状のレーザ光の発光タイミングに、互いに時間差を設けることによって、飛翔体側で2つのパルス状のレーザ光を同じタイミングで受光させ、強度の高まった1つのパルス光として合成させるとともに、飛翔体からの2つの反射光を同じタイミングで受光して1つの反射光として合成し、飛翔体との距離算出時の誤りを減らす。
(もっと読む)
目標捕捉装置
多重反射のビーム成分を意図的に減衰させる。減衰フィルタ(18,19)を受信器(2)の前に及び送信器(1)の後にそれぞれ設ける。ビーム成分の強度の減衰は、ファクターで0.7、少なくとも0.5または0.3となる。別の方法または追加的に、ミラー(10)または立方体プリズム(14)の偏向手段を用いてビームを減衰させることができる。多重反射するビーム成分は、減衰手段を少なくとも2回通過する。従って、通常のビーム成分に比べて、一層減衰される。さらに受信器(2)の入力表面(5)は、円錐の偏向表面で囲まれている。この偏向表面は、そこに入射する光を吸収し、残部を入力方向以外の方向に反射して、多重反射を生じさせない。  (もっと読む)
(もっと読む)
離れている2つの送信機および受信機を持つ周辺検出システム
本発明は、電磁波の2つの送信機および送信された電磁波の反射を受信するため適当に向けられる2つの受信機を備えた周辺検出システムに関し、第1の送信機が第1の受信機と共に、第1の目標領域に向けられ、第2の受信機が第2の受信機と共に、第2の目標領域に向けられている。第3の目標領域を検出するため、少なくとも第1の送信機の前に、この送信機から送信される電磁波の少なくとも一部を第3の目標領域へ少なくとも一時的に向ける光学手段が設けられ、少なくとも第2の受信機の前に、第1の送信機から第3の目標領域へ送られる電磁波の反射を少なくとも一時的に第2の受信機へ向ける光学手段が設けられていることが、提案される。光学手段は、なるべく常に設けられ、それぞれ1つの送信機のみが動作するので、それぞれ1つの受信機がそれぞれ妨げられることなく第3の目標領域を検出する。それにより、例えば自動車において、走行方向において車両の右側および左側に設けられる送−受信機対により、走行方向において全正面範囲が検出可能である。  (もっと読む)
(もっと読む)
位置検出デバイス
n個のセグメントと、光検出要素アレイのセグメントからの出力値(OV)を比較することによって、最大強度を有するセグメントを識別するように構成されるパラレル算術処理部とを有する光検出要素アレイを備える位置検出デバイス。パラレル算術処理部は、最大強度を有するセグメントが選択されるまでセグメントを順に選択/除外するように構成される少なくとも1つの比較段を備え、第1段は、入力セグメント(IS)としてそれぞれの光検出要素セグメントから出力値OVを受け取り、追加段は、入力セグメントISとして先行する段から出力値OVを受け取る。その位置検出デバイスを備えるレンジファインダもまた提供される。 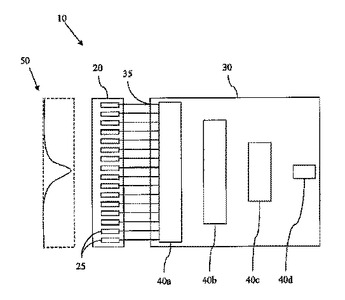 (もっと読む)
(もっと読む)
変調光による距離測定装置
【課題】 拡散光によるトランスポンダ方式により、例えば圃場内や工場内などを移動する移動体の位置計測、または2台の移動体間の距離計測を高精度かつ低コストで行う。
【解決手段】 第1の周波数で変調された第1の変調光(80)を所定の角度範囲にわたって放射可能に配置された複数の発光ダイオード(33)を有する光送信部(68)と、第2の周波数で変調された第2の変調光を所定の角度範囲にわたって受信可能に配置された光受信部(70)とを備えた光送受信器(37)を具備する光トランスポンダ方式による距離測定装置。
(もっと読む)
121 - 134 / 134
[ Back to top ]