
Fターム[5J084BA38]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 受光系に関するもの (1,335) | 複数の受光素子を有するもの (515)
Fターム[5J084BA38]の下位に属するFターム
1次元配列 (69)
2次元配列 (307)
各々投光と対をなしているもの (5)
Fターム[5J084BA38]に分類される特許
21 - 40 / 134
物体監視システム及び方法
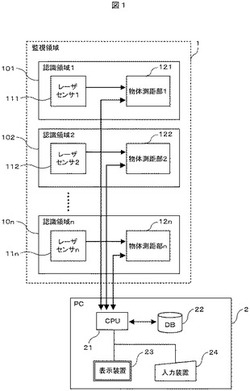
【課題】複数の認識領域間に渡って物体を認識しながら物体の動きを監視することができるシステムを提供する。
【解決手段】複数に分割された認識領域毎に設置された、レーザセンサの照射により対象とする認識領域の測距データを得る測距手段と、測距手段によって取得された測距データと物体特定データDBに格納された情報を照合することにより、物体のサイズを基に支障物を判定する第1判定手段と、第1判定手段による判定の結果、支障物と判定された物体について、認識データDBに格納された物体のデータと照合することにより、複数の認識領域に渡って移動する物体であって、以前に検知された物体と同一の物体である場合には、認識データDBの該物体に関する測距データを追加し、未検知の物体である場合には、物体に関する測距データを認識データDBに新たに登録し、同一の物体及び新規の物体に関する移動に関する情報について軌跡データDBを更新する。
(もっと読む)
目標追跡装置及び目標判定方法

【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
レーザー距離計付き撮影装置
【課題】レーザー距離計を簡単な構造の取り付け器具によりアクセサリーシューを有する撮影機材(デジタルカメラ)に一体的に取り付ける。
【解決手段】被写体Hを撮影レンズ12により撮影した被写体像を結像して被写体像のデジタル画像データを出力する撮像素子13を内蔵した撮影機材(デジタルカメラ)10と、デジタルカメラ10から被写体Hまでの距離を測定するレーザー距離計20と、デジタルカメラ10のアクセサリーシュー16に着脱されるシュー着脱部材32が基板31の一面(下面)31aに突出して設けられ且つレーザー距離計20を載置する載置部30b1が一面(下面)31aとは反対側の他面(上面)31bに形成された取り付け器具30と、を備えたレーザー距離計付き撮影装置1を提供する。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して所定領域内の物体を特定する手段とを備える、車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、対応画像上の所定物体に対する所定領域の位置ずれ方向が常に同一方向である場合にレーダまたはカメラの光軸ずれがあると判断し、所定領域の位置ずれ方向が所定物体の移動方向と逆方向である場合にレーダとカメラの同期ずれがあると判断する判断手段と、を有する。
(もっと読む)
方向検知デバイスおよび電子機器
【課題】被検知対象物の2軸に関する移動方向を検知する方向検知デバイスであって、安価である方向検知デバイスを実現する。
【解決手段】方向検知デバイス100は、被検知対象物106を検知するための検知信号を出力する発光部105Dと、検知信号が被検知対象物106にて反射されて得られた反射後検知信号が入力されるとともに、そのそれぞれが、3つの異なる出力A〜Cを出力する受光部105A〜105Cと、判定信号A〜Cの論理積を求めることによって、判定信号Dを生成する論理積回路102と、判定信号A〜Dに基づいて、被検知対象物106の、X軸およびY軸の2軸に関する移動方向を検知する判定装置103と、を備える。
(もっと読む)
レーザスキャナ
【課題】簡単、軽量な構造で、マルチビームを用いたレーザスキャナを提供する。
【解決手段】パルスビーム12を全周走査するレーザスキャナ1に於いて、該レーザスキャナが本体部3と該本体部に回転可能に設けられた回動部4とを有し、該回動部がパルスビームを該回動部の中心軸に対して垂直方向に偏向して照射する偏向部材15を具備し、前記本体部は、2次元的に配置され、複数のパルスビームを発する複数の発光源11と、パルスビームを投光、受光する光学系6と、前記回動部の水平回転角を検出する回転角検出部19と、対象物からの反射光12′を前記偏向部材を介して受光し、前記発光源とそれぞれ共役の位置にある複数の受光部18と、該受光部からの受光信号に基づき測距を行う測距部9と、前記発光源の配置位置、前記回転角検出部の検出結果に基づき前記偏向部材から照射されるパルスビームの照射方向を演算する制御演算部10とを具備した。
(もっと読む)
警備システム
【課題】変化する監視エリアに対応しつつ、監視エリアの縮小を招くことなく誤検出を回避する警備システムを提供する。
【解決手段】処理部22は、角度範囲Snごとに定期的に取得される距離データLnを、1日以上の期間的な範囲で記憶部28に蓄積する。処理部22は、蓄積された距離データLnから仮平均値Lnaおよび標準偏差σを算出し、標準偏差が±1σの範囲に含まれる偏差内距離データLnxを抽出するとともに、その範囲外の偏差外距離データLneを蓄積の対象から除外する。処理部22は、偏差内距離データLnxから真平均値Lnarおよび真標準偏差σrを算出し、真平均値Lnarから真標準偏差σrを減じることにより、その角度範囲Snにおける更新済距離データLnrを算出する。そして、処理部22は、この更新済距離データLnrを、更新済監視エリアArの外縁までの距離に設定する。
(もっと読む)
遠隔監視システム
【課題】監視領域と監視室とが離れている場合であっても、低コストで監視業務を効率化することができ、障害物の内容や障害物検知装置の異常を的確に把握することができる遠隔監視システムを提供する。
【解決手段】レーザ光Lを照射して計測データDを出力する計測手段1と、障害物を検出する障害物検出手段2と、障害物検出時に警報信号を出力する出力手段3と、計測データDを単位時間Δt毎に区切った計測データファイルFを作成する計測データ処理手段4と、計測データファイルFを保存する記憶手段5と、計測データファイルFを出力手段3に伝送する通信手段6と、を備え、計測データ処理手段4は、障害物が検出された場合に障害物検出時tnの計測データDを含む計測データファイルFnを抽出して伝送する。
(もっと読む)
シールドとレンズが改良された光学式近接センサ
【課題】シールドとレンズが改良された光学式近接センサを提供する。
【解決手段】下にある発光体16及び光検出器12のアセンブリに対して迅速にかつ正確に位置合わせ及び位置決めされうる光シールド18を備えた光センサ10。光学式近接センサによって放射されまた受け取られる光を効率的に平行化し、かつクロストークを減少させるレンズ配列を備える。
(もっと読む)
光走査装置及びレーザレーダ装置
【課題】小型化、低コスト化を実現できるとともに、受光感度がよくて距離測定精度の高いレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置10は、装置本体を構成するベースフレーム12と、ベースフレーム12の所定位置に固定され、レーザ光を出射する光源14と、光源14からの出射光を図示しない対象物に向けて走査する光走査装置16とを有している。光走査装置16はリコン基板から半導体微細加工法により可動板(反射ミラー)やトーションバー等が一体に形成されており、可動板の中央部にはフォトダイオードが一体に形成されている。対象物からの反射光22は、光学部品を介することなく直接フォトダイオードにより受光される。
(もっと読む)
距離情報取得装置および距離情報取得装置における光量調節方法
【課題】TOF方式等にて信号光と反射光から被写体との距離値を取得する際に、必要最小限の発光量に抑えることができる距離情報取得装置を提供する。
【解決手段】距離情報取得装置は、対象物に対して信号光を発光する発光手段と、対象物からの反射光を受光する複数の受光素子で構成される受光手段と、受光素子毎に受光した反射光と信号光を基に、受光素子毎に対象物との距離値を取得して距離画像を生成する距離情報取得手段と、距離画像を基に発光手段から発光する信号光の発光量を調整する光量調整手段を備え、光量調整手段は、距離画像から算出した距離値の分布特性に基づいてジェスチャ認識に必要な計測距離値を決定し、決定した当該計測距離値に対応して信号光の発光量を調整する。
(もっと読む)
深さセンサーの深さ推定方法及びその記録媒体
【課題】対象物体までの深さ計算時に漏れたフレーム信号によるエラーを補償することができる深さセンサーを利用した深さ推定方法を提供する。
【解決手段】光信号を対象物体に放射する段階と、対象物体から反射される光信号及び深さピクセルに印加され一定の位相差で周期的に印加される複数のゲート信号に基づいて複数のフレーム信号を発生させ、複数のフレーム信号及び複数のフレーム信号のそれぞれのフレーム情報を対象物体までの深さ推定のために提供する段階と、複数の提供されたフレーム信号のうちから漏れたフレーム信号の有無及び複数の提供されたフレーム信号の連続パターンを考慮して、複数の提供されたフレーム信号をそれぞれがエラーなしに、対象物体までの深さの推定に利用される複数のフレーム信号グループにグループ化する段階と、複数のフレーム信号グループのそれぞれを用いて、前記対象物体までの深さを推定する段階とを有する。
(もっと読む)
センサー、その動作方法、及びセンサーを含むデータ処理システム
【課題】光信号の復調過程で発生する光電子の損失を補償して距離情報を正確に測定するセンサーの動作方法を提供する。
【解決手段】第1区間T1と第2区間T2とをそれぞれ有する複数のパケットP〜NPの各第1区間において、光源から出力された変調された光信号を復調するために、相異なる位相を有する複数のオシレーション信号Pa、Pbのそれぞれを複数のフォトゲートのそれぞれに供給する段階と、前記複数のパケットの各第2区間において、前記光源をディセーブルさせ、DC電圧を前記複数のフォトゲートのそれぞれに供給する段階と、を含む。
(もっと読む)
距離情報抽出方法及び該方法を採用した光学装置
【課題】距離情報抽出方法及び該方法を採用した光学装置を提供する。
【解決手段】数学的に理想的な波形ではない実際の非線形的波形を考慮し、光学装置と被写体との間の距離を決定する方法及び装置が開示され、該方法と装置は、被写体に投射された波形の類型の制限を受けることなく正確な距離情報を抽出でき、歪曲及び非線形性がほとんどない高価の光源や光変調素子を使用する必要がなく、複雑な誤差補償手段が要求されない。また、既存の光源、光変調素子及び光学装置をそのまま利用でき、追加コストがかからない。さらに、あらかじめ計算された距離情報が保存されているルックアップテーブルを使用するために、距離情報を抽出するにおいて演算量が非常に小さいので、リアルタイム距離情報映像の撮影が可能である。
(もっと読む)
測距センサおよび電子機器
【課題】周辺光による誤測距または誤検知を回避することができる測距センサを提供する。
【解決手段】測距センサ1は、第1信号光Rf1を出射する第1発光素子11と、第2信号光Rf2を出射する第2発光素子12と、第1信号光Rf1または第2信号光Rf2を受光して受光信号を出力する受光素子部20とを備える。第1発光素子11および第2発光素子12は、受光素子部20の光軸20bと交差する平面上に配置され、第1発光素子11は、平面上で受光素子部20の光軸20bに対して第1方位に配置され、第2発光素子12は、平面上で受光素子部20の光軸20bに対して第1方位とは異なる第2方位に配置されている。これによって、周辺光による誤測距または誤検知を回避することができる。
(もっと読む)
計測装置
【課題】簡易な構成でありながら、参照面と被検面との間の絶対距離を高精度に計測することができる計測装置を提供する。
【解決手段】第1の光源から射出される光の波長を、既知の真空波長である第1の基準波長又は第1の基準波長とは異なる既知の真空波長である第2の基準波長に設定するための波長基準素子と、参照面と被検面との間の空間の群屈折率を検出する屈折率検出部と、参照面で反射された光と被検面で反射された光との干渉信号を検出して、干渉信号から参照面と被検面との間の光路長に相当する位相を検出する位相検出部と、波長基準素子を用いて第1の光源から射出される光の波長を第1の基準波長から第2の基準波長に連続的に変更させながら第1の基準波長及び第2の基準波長のそれぞれについて、参照面と被検面との間の光路長に相当する位相を検出するように位相検出部を制御して、絶対距離を求める処理部とを有する計測装置。
(もっと読む)
距離測定方法、距離測定システム及び距離センサー
【課題】距離測定方法を提供する。
【解決手段】距離測定方法は、複数の変調位相オフセットで複数の積分信号を測定する段階と、複数の変調位相オフセットのうちから他の一つの積分信号に対する受信時間を調節するために、複数の変調位相オフセットのうちから少なくとも一つに対する少なくとも一つの積分信号をそれぞれ推定する段階と、推定された少なくとも何れか一つの信号によってターゲットと受信器との距離を決定する段階と、を含む。
(もっと読む)
センサ固定具
【課題】複数個のセンサで形成される指向領域がつながるようにセンサを配置すること、さらには、各センサの指向領域を所定の測定対象空間の中で同じ向きにし、センサシステムとしての測定誤差を防止することを課題とする。
【解決手段】複数のセンサを固定可能な固定具であって、センサの測定動作を阻害しないようにセンサを個々に保持する保持部材と、複数の前記保持部材をその上下から固定する為の挟持部材と、前記保持部材と挟持部材とを固定する為の連結部材とを備え、前記挟持部材の挟持面には、保持部材を略円周方向に配置することを規制するための段差部が形成され、該段差部は、前記挟持面と直交する垂直段差面を有するものとする。
(もっと読む)
光学式測距センサ、および、それを搭載した電子機器
【課題】小型,高性能であり、リフローやフロー半田による実装が可能な安価な光学式測距センサを提供する。
【解決手段】基板11上の発光素子12と受光素子13および信号処理部14とを透光性樹脂で封止して成る樹脂形成体15,16を、遮光性樹脂で一体成形して樹脂形成体17を形成し、樹脂形成体17の上面および両側面を熱硬化性樹脂のレンズ19,20が設けられた金属性のレンズ板21で覆って、光学式測距センサを構成している。また、レンズ板21の下端部をGND端子としている。こうして、カーボン入り熱可塑性樹脂のレンズ付きケースを用いる場合よりも耐熱性を高めて、半田付けにより確実に実装することができる。また、レンズ板21に凸状部21aを設けたので、発光側からの光が受光側レンズ20に直接入射するのを防止できる。また、基板11を用いたので、樹脂封止の際に裏側まで樹脂成形する必要がなく厚さを薄くできる。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置
【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
21 - 40 / 134
[ Back to top ]