
Fターム[5J084BB14]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | ビームスプリッタ (119)
Fターム[5J084BB14]に分類される特許
1 - 20 / 119
距離計測方法および装置とそれを搭載した形状計測装置
レーザレーダ装置
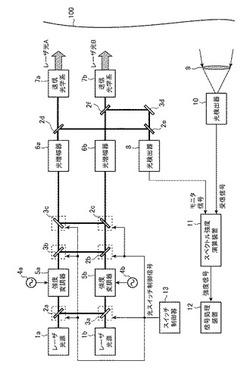
【課題】装置内における伝送効率を自動で校正することのできるレーザレーダ装置を得る。
【解決手段】光検出器8は、送信光学系7a、7bからの出射光のパワーに相当するモニタ信号を出力する。光検出器10は、測定媒質100を通過した光を受信し、その値に対応した受信信号を出力する。信号処理装置12は、送信光学系7a、7bからの出射光に対する光検出器10の結合効率を示す値に基づいて、吸収波長の大きい光の振幅または電力と吸収波長の小さい光の振幅または電力とを補正し、その差異から測定媒質100に対する光学的厚みを測定する。
(もっと読む)
追尾式レーザ干渉計

【課題】移動体の移動量と、移動体の移動方向と直交する方向におけるずれ量との測定にかかる測定時間を短くすることができるとともに、測定にかかるコストを低減できる追尾式レーザ干渉計を提供する。
【解決手段】追尾式レーザ干渉計1は、レトロリフレクタRで反射される測定光L22を用いて移動体Mまでの距離を測定する測長部21と、レトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22とを有する本体2と、検出器222からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備え、制御手段3は、本体2にレトロリフレクタRを追尾させることを停止させた状態で、レトロリフレクタRで反射された測定光L21の検出器222における受光位置Q2に基づいて、移動体Mの移動方向に対して直交する方向における移動体Mのずれ量を測定するずれ量測定部32を備える。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測する。
【解決手段】第1光源からの第1光束によって形成される被検体の位置情報を含む第1干渉信号と、第2光源からの第2光束によって形成される前記被検体の位置情報を含む第2干渉信号と、前記第1光束の波長を走査しながらの前記第1干渉信号と前記第2光束の波長を走査しながらの前記第2干渉信号とに基づいて前記被検体までの絶対距離を算出する処理部とを備え、前記処理部は第1時刻から第2時刻までの時間間隔における前記第1干渉信号の位相と前記第2干渉信号の位相との差分の変化量によって得られる前記被検体の速度によって、前記第1干渉信号および前記第2干渉信号の少なくとも一方に基づいて算出される誤差を有する絶対距離を補正し、誤差が補正された絶対距離を算出する。前記第1時刻および前記第2時刻は前記第1光束の波長と前記第2光束の波長との差分が互いに等しい時刻である。
(もっと読む)
距離速度測定装置
【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測するために有利な波長走査干渉計を提供する。
【解決手段】波長走査干渉計は、光源から射出される光束の波長を変更しながら該光束から分割された参照光と被検光との干渉光の信号に基づいて被検体までの絶対距離を計測する。波長走査干渉計は、前記光源から射出される光束の波長が互いに等しい時刻である第1時刻およびその後の第2時刻と、前記第1時刻、前記第2時刻のそれぞれにおける前記干渉光の信号の周波数である第1周波数、第2周波数とに基づいて、前記被検体の移動による誤差成分が低減された絶対距離を算出する処理部を備える。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
光波距離測定装置
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
距離計
【課題】対象物までの距離を非接触式的に測定するための測定装置において、測定の正確性を向上させ、その動的領域を広げる。
【解決手段】対象物までの距離を非接触式に測定するための携帯式距離計であって、ハウジング10と、光学測定光1を使用し走時測定に基づき、対象物までの距離を非接触的に測定可能である測定器とを備え、この測定器は、光源ユニットと、光学素子を有する光学ユニットとを備え、光学ユニットは、投光・受光用光学系、測定光を対象物へと投光するための投光路、および対象物から反射/散乱した測定光を受けるための受光路を有する。さらに、投光路に影響する光学素子が初期位置から可動であり、動作センサが、ハウジングの動作を測定中に把握するように構成されており、可動光学素子は、ハウジング震揺動作の補償下で投光路が空間的確定位置に固定されるように、初期位置から可変補償位置へと移動する。
(もっと読む)
距離計
【課題】ユーザが誤った取り扱いをするのを回避することができ、これを通じて正確な計測結果を与えることができる距離計を提供する。
【解決手段】ハウジング10と、ハウジング内に設けられた、光ビームを用いて、目標物までの距離を非接触で計測するための測距部20と、ハウジング上に設けられた、ユーザが選択しうるようになっている少なくとも1つの計測起点50A〜50Dと、ハウジング上に設けられた、少なくとも測距部20を操作しうるようになっている操作ボタン30と、ハウジング上に、操作ボタンと関連づけられて設けられた、制御条件、および/または計測起点から目標物までの計測距離が示されるディスプレイ40とを備える距離計100において、ハウジング上に、ディスプレイとは別個に、計測起点50A〜50Dに1対1で対応し、いずれかの計測起点が選択された場合にアクティブ状態となる少なくとも1つの視覚的認識可能手段を設ける。
(もっと読む)
光波距離計
【課題】フィルタ位置設定時間が長引くことなく、測距時間も短縮できる光波距離計の提供。
【解決手段】測距光路23間に受光光量調節用の可変濃度フィルタ25が配置された位相差方式の光波距離計において、測定ごとに測距値、可変濃度フィルタ25のフィルタ位置、測距信号の信号棄却率を記憶手段51に記憶しておき、測定時には演算処理部50で、測距信号のサンプリングから算出したサンプル測距値と記憶手段51内の測距値とを比較して、差異が1m以下であるときは、その中で最も閉じられたフィルタ位置に可変濃度フィルタ25を設定し、さらに該フィルタ位置での信号棄却率が0%ならそのフィルタ位置のまま、棄却率が0%でないときはそのフィルタ位置よりも若干濃度を濃くして測距を開始するフィルタ位置調節手段を設けた。
フィルタ位置調節は数回で済み、最適なフィルタ位置に決まるので信号棄却率が下がり測距回数を減らせるため、結果的に測距時間が短縮できる。
(もっと読む)
レーザー距離計
【課題】光源からの光が受光光路に混入するのを防止し、小型で測定距離の長大化と測定精度の高精度化を図ることが可能なレーザー距離計を提供する。
【解決手段】レーザー距離計300は、目標物体側から順に、対物レンズ30、部分反射部材20、プリズム部材50、及び、接眼レンズ80からなる視準光学系と、部分反射部材20に設けられ、視準光学系の光路から第1の測定光路を分岐させる第1の光路分岐面21aと、プリズム部材50内の一つの反射面であって、視準光学系の光路から第2の測定光路を分岐させる第2の光路分岐面54aと、第1の測定光路または第2の測定光路のいずれか一方に配置され、対物レンズ30を介して目標物体に投射するための光を発射する光源10と、第1の測定光路または第2の測定光路の他方に配置され、目標物体で反射して対物レンズ30で集光した反射光を受光する受光素子40と、を有する。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】第1の視点から得た測定対象物の三次元点群位置データに基づき三次元モデルを形成し、この三次元モデル上において、第2の視点から見た測定対象物の撮影画像との共通部分を指定する。次いで、上記共通部分において、対応点となる特徴点を算出し、対応点を指定する。そして、この指定された対応点に基づいて、第1の視点から得た三次元点群位置データを扱うための座標系に関連付けた第2の視点の三次元位置を算出する。
(もっと読む)
測定方法及び測定装置
【課題】所要の測定範囲内の多数の測定点を簡便に、而も自動、高速で測定可能な測定方法及び測定装置を提供する。
【解決手段】測距光を照射し、測定点からの反射測距光を受光して測定点の測距を行う測距部8と、測定範囲のデジタル画像を取得する撮像部7と、測距光の測距光軸を偏向する測距光軸偏向部16と、測距光軸の測角を行う測角部9と、前記デジタル画像を画像処理して測定点を抽出する画像処理部14と、制御演算部21とを具備し、該制御演算部は前記デジタル画像上から測定点の角度を検出し、検出した角度に基づき前記測距光軸偏向部を制御して前記測距光軸を順次測定点に向け、該測定点の測距を行う様構成した。
(もっと読む)
物体検出装置および情報取得装置
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
光学式計測装置及びその干渉計用プリズム。
【課題】ゴーストのない高精度な光干渉観測を可能にする。
【解決手段】第1の台形プリズム131、第1の直角プリズム132、第2の直角プリズム133、第3の直角プリズム134、第2の台形プリズム135、第4の直角プリズム136を貼り合わせて一体化した構造のプリズムユニットを用いる。上記第1の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第1の直角プリズムの斜面に貼り合わされ、上記第2の台形プリズムの互いに平行な二つの面の一方の面にビームスプリッタ膜が形成され、上記ビームスプリッタ膜を挟んで上記面が上記第4の直角プリズムの斜面に貼り合わされている。また、上記第2の直角プリズム及び第3の直角プリズムは、各斜面の一方の面に偏光ビームスプリッタ膜が形成され、上記偏光ビームスプリッタ膜を挟んで各斜面が貼り合わされている。
(もっと読む)
測距方法及びレーザ測距装置
【課題】一つのレーザ照射手段を用いて高精度の測距が可能な測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及びレーザ測距装置は、波長の異なる複数のレーザ照射手段を用いるのではなく、スペクトル線幅が比較的広く多縦モード発振するレーザ照射手段を利用して測距を行う。このため、高精度の測距が可能でありながらレーザ照射手段が一つで良く、レーザ測距装置の光学系の作製をより容易に行うことができる。
(もっと読む)
自動目標検出を有する座標測定装置
1 - 20 / 119
[ Back to top ]