
Fターム[5J084DA08]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 信号波形図 (302)
Fターム[5J084DA08]に分類される特許
1 - 20 / 302
レーザレーダ装置
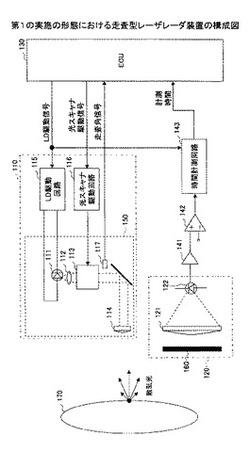
【課題】距離の異なる複数の検出対象を同時に検出することができ、低コストで精度の高い測距を行なうことのできるレーザレーダ装置を提供する。
【解決手段】光源と、前記光源より出射された光を走査する光走査部と、前記光走査部より出射された光が検出対象に照射されることにより、前記検出対象において反射された光を受光する受光部と、を有し、前記検出対象と前記受光部との間には、複数の貫通孔を有する多孔部材が設置されていることを特徴とするレーザレーダ装置を提供することにより上記課題を解決する。
(もっと読む)
レーダ装置

【課題】一発測距方式及び積分測距方式で測距を行うレーダ装置において、測距方式の切り替えを状況に応じて的確に実施できるようにする。
【解決手段】一発測距方式による測距と積分測距方式による測距とを並行して実施し、一発測距方式による第1測距値D1、積分測距方式による第2測距値D2と共に、受信信号のパルス幅を表す強度パラメータPを取得し(S110)、強度パラメータPが判定閾値Pthより大きければ(S120−YES)、第1測距値D1を距離情報として選択し(S130)、強度パラメータPが判定閾値Pth以下であれば(S120−NO)、第2測距値D2を距離情報として選択する(S140)。このように受信信号の信号強度ではなく、反射光の強度と相関を有する強度パラメータP(受信信号Rのパルス幅)を用いているため、受信信号Rが飽和している場合でも、反射光の強度を正しく把握することができ、その結果、その時々の状況に応じた測距値の選択を的確に行うことができる。
(もっと読む)
測距装置
【課題】送信波を反射した物標から到来する反射波を、より高精度に検出することが可能な測距装置を提供する。
【解決手段】測距装置では、測定周期Tcyclを表す周期信号を発生させ、この周期信号に同期してN個のパルス信号からなる送信タイミング信号STを発生させることで、レーザ光を送信する。なお、各パルス信号は、当該装置の最大検知距離をレーザ光が往復するのに要する時間より充分に長い時間間隔Twで出力される。そして、AD変換器32が、N個のパルス信号のそれぞれについて所定のサンプリング間隔で信号をサンプリングし、加算部33aが、時間間隔Twのうち複数の計測期間Tsおよび送信前期間Tbの間、各送信波の送信タイミングを基準として同一時間にサンプリングされたサンプリング値同士を加算する。そして、測距部33が、複数の送信前期間Tbのサンプリング値の全てを参照してレーザ光の反射波の検出に必要な検出閾値を設定する。
(もっと読む)
距離測定装置、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、物体までの距離を精度よく検出できるようにする。
【解決手段】レーダ装置は、区分された領域毎に、演算距離および演算輝度を検出し、演算輝度と、反射光の検出が困難になる程度の輝度に設定された輝度閾値とを比較し、演算輝度が輝度閾値以上となる高輝度領域を抽出する。そして、照射領域において水平方向に並ぶ一対の高輝度領域を検出し、一対の高輝度領域の間隔に基づいて一対の高輝度領域を形成する物体を表す高輝度物体までの距離を演算する(S510〜S550)。この構成では、輝度が高く、レーザ光の反射光が検出できない可能性がある高輝度領域においても、物体までの距離を検出することができる。
(もっと読む)
プラットホームドア用安全装置
【課題】 プラットホームドアの近傍の所定の領域内に存在する物体を従来より正確に検出することができるプラットホームドア用安全装置を提供する。
【解決手段】 プラットホームドア用安全装置は、自身に対する物体の距離を受光素子の出力のピークのタイミングに基づいて取得して距離の情報をそれぞれ有する画素の集合である距離画像を生成するタイムオブフライト方式の三次元センサーと、プラットホームドアの近傍の検出領域内に存在する物体を検出する領域内物体検出手段と、領域内物体検出手段によって物体の検出に使用される画素である検出用画素を選定する検出用画素選定手段とを備えており、検出用画素選定手段は、三次元センサーによって生成された距離画像の画素のうち、その距離画像より前に三次元センサーによって生成された距離画像からの距離の変化量が所定の基準を満たす(S103でYES)画素のみを検出用画素として選定する(S104)。
(もっと読む)
レーザートラッカー
【課題】 ターゲットが移動するとき、精度を保ちながら、レーザービームをターゲットに、より高速で追従させるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、角度検出手段4により検出された検出角度および距離測定手段6で測定した測定距離をそれぞれ処理する情報処理手段7とを有する。情報処理手段7は、角度検出手段4で検出された検出角度または距離測定手段6で測定された測定距離の出力であるパルス数をカウントする複数のカウンタを含み、これら複数のカウンタをターゲットの移動速度に応じて切換可能とする。角度検出手段4または距離測定手段6と、情報処理手段7におけるいずれかのカウンタとの間に、前記カウンタに入力するパルスを整数分の1に分周するプリスケーラ8を設けた。
(もっと読む)
光学式遠隔気流計測装置の有色ノイズ低減方法とその装置
【課題】本発明の目的は、装置の外部環境に応じた有色ノイズであっても低減することができ、計測信頼性の劣化が少なくより遠距離まで計測可能で、広い飛行速度範囲に対応できる光学式遠隔気流計測装置を提供することにある。
【解決手段】本発明の光学式遠隔気流計測装置の有色ノイズ低減方法は、レーザ光を送信信号として大気中に放射して、受信信号との間の周波数のドップラーシフト量に基づき遠隔領域の気流の風速を計測する光学式遠隔気流計測装置において、最遠方以遠の領域では散乱光の信号強度がほとんどないとみなし、その最遠方以遠の計測領域においてある周波数間隔で分割されたドップラー周波数成分毎に信号強度の平均化処理を行ってノイズ分布を算出し、該ノイズ分布をある距離間隔で分割された計測領域の信号強度分布のすべてに対して該ドップラー周波数成分毎に減算処理を行うものとした。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
半導体装置の駆動方法
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
信号処理装置
【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法
【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
光走査装置
【課題】投光タイミングのテーブルがなくても、容易に、光ビームの照射対象領域の各画素に光ビームを照射することができる光走査装置を提供する。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
距離計測方法および装置
【課題】 本発明は,複数の周波数を発振する光源からの光を光変調器を用いて光ビートダウンして,低周波にて位相検出することにより、装置コストを上げずに測定精度高めることを目的とする。
【解決手段】 本発明は複数の異なる周波数の光を発振する光源と、前記光源からの光と、測定対象に照射されてから反射された前記光源からの光との周波数を変調する光変調器と、前記光変調器に電圧信号を入力する発振器と、前記光変調器により変調された光信号を検出する検出器と、前記検出器により検出された光信号の位相から距離を算出する距離演算回路とを備えることを特徴とする距離計測装置を提供する。
(もっと読む)
時間振幅変換装置
【課題】複数の時間振幅変換回路を有する場合でも、素子ばらつきの影響を小さくすることのできる時間振幅変換装置を得る。
【解決手段】電圧電流変換素子3a,3bは、増幅器11a,11bの出力電圧に対応した電流を出力する。校正時は、時間振幅変換回路20a,20bに対して、スイッチ2a,2b及びスイッチ5a,5bを切り替えることで、各々基準電流源1を接続し、電圧電流変換素子3a,3bの出力電流値を基準電流源1の電流値に収束させた際の電圧値を容量素子4a,4bの値として記憶する。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測する。
【解決手段】第1光源からの第1光束によって形成される被検体の位置情報を含む第1干渉信号と、第2光源からの第2光束によって形成される前記被検体の位置情報を含む第2干渉信号と、前記第1光束の波長を走査しながらの前記第1干渉信号と前記第2光束の波長を走査しながらの前記第2干渉信号とに基づいて前記被検体までの絶対距離を算出する処理部とを備え、前記処理部は第1時刻から第2時刻までの時間間隔における前記第1干渉信号の位相と前記第2干渉信号の位相との差分の変化量によって得られる前記被検体の速度によって、前記第1干渉信号および前記第2干渉信号の少なくとも一方に基づいて算出される誤差を有する絶対距離を補正し、誤差が補正された絶対距離を算出する。前記第1時刻および前記第2時刻は前記第1光束の波長と前記第2光束の波長との差分が互いに等しい時刻である。
(もっと読む)
人体検知センサ及び自動水栓
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
(もっと読む)
1 - 20 / 302
[ Back to top ]